 速看!發那科機器人做為profinet轉ethernetip主站參數設置,每步都關鍵
速看!發那科機器人做為profinet轉ethernetip主站參數設置,每步都關鍵
本次和大家一起聊一下倍訊科技profient轉ethernetip網關(bx-606-eip)連接發那科機器手臂,機器手臂Ethernetip端如何設置。機器手臂作為網關的主站,需要在機器手臂的參數界面上進行調整。比如,調整主、從站,以及字節數和IP地址的對應。下面一起看一下機器手臂的參數如何調整。

發那科機器手臂作為主站時,不同的通信場景和從站設備參數設置會有所差異,以下以常見的EtherNet/IP通信為例介紹參數設置步驟:
前提條件
確保發那科機器人控制器已正確安裝且運行正常,并且已經連接到目標網絡。同時,了解要連接的從站設備(如I/O模塊、其他智能設備等)的詳細信息,包括設備型號、通信規范等。
參數設置步驟,進入系統設定界面
在發那科機器人示教器上,按下“MENU(菜單)”鍵。在彈出的菜單中,選擇“系統”選項。找到主機通訊選項頁面。
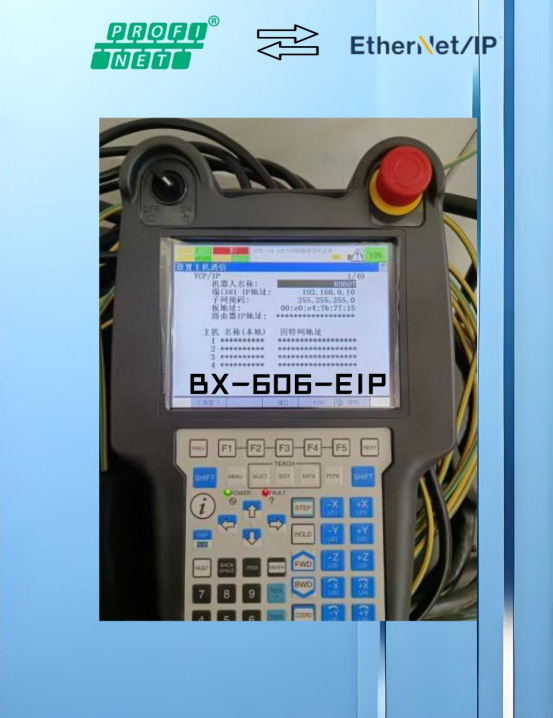
找到TCP/IP選項這個選型

設置網絡參數
在系統設定頁面中,找到“網絡”或“通信”相關選項。選擇“EtherNet/IP”設置項。設置機器人主站的IP地址、子網掩碼、默認網關等基本網絡參數。這些參數應與實際的網絡環境相匹配。例如,IP地址可以設為192.168.0.10,子網掩碼255.255.255.0,默認網關192.168.0.1(具體數值根據實際網絡確定)。倍訊科技profient轉ethernetip網關(bx-606-eip)的Ethernet ip網口的地址網段一致。
調整機器人連接的遠程I/O的IP地址即網關ethernet端的IP地址
配置從站設備
點擊“添加從站”按鈕,開始掃描網絡中的EtherNet/IP從站設備。掃描完成后,從列表中選擇要連接的從站設備,并點擊“確定”。根據從站設備的說明書,設置從站的相關參數,如設備實例ID、數據映射等。例如,如果從站是一個I/O模塊,需要指定輸入輸出數據的長度和映射關系。
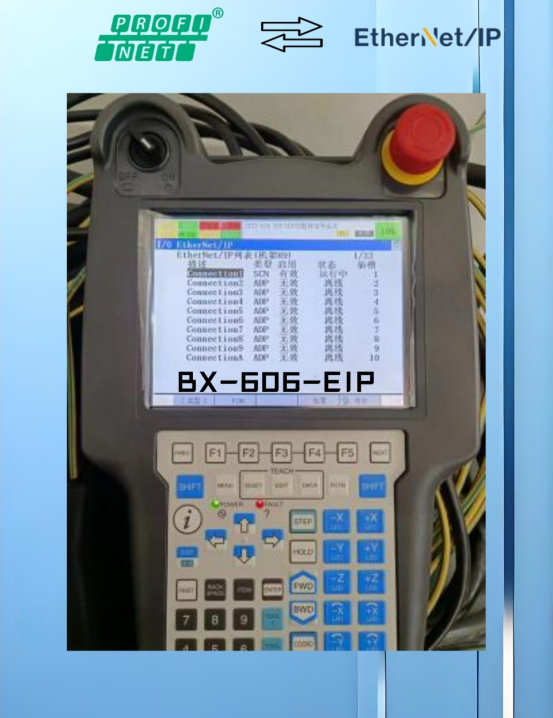
數據映射與通信設置
設置好從站IP(本例為192.168.0.5)廠商ID為170,設備類型11,產品代碼1輸入輸出大小32個字(64字節),Assemblyinstance的輸入輸出為100/150即(通訊速率)。地址192.168.0.5與倍訊科技profient轉ethernetip網關(bx-606-eip)的Ethernet ip網口的地址網段一致
保存與測試
完成所有參數設置后,保存配置信息,回到程序編輯界面,編寫簡單的測試程序,用于驗證主從站之間的通信是否正常。例如,讀取從站的輸入數據并在示教器上顯示,或者向從站輸出控制信號。運行測試程序,觀察通信狀態和數據交互情況。如果出現錯誤,根據錯誤提示信息檢查參數設置和網絡連接,進行相應的調整。
以上步驟僅為一般性指導,實際操作中可能因發那科機器人型號、系統版本以及從站設備的不同而有所變化。無論機器手臂作為主站設備還是從屬設備與倍訊科技profient轉ethernetip網關(bx-606-eip)都可以完成數據交互
審核編輯 黃宇
-
機器人
+關注
關注
213文章
29555瀏覽量
211890 -
Ethernet
+關注
關注
3文章
445瀏覽量
56738
發布評論請先 登錄
顛覆智造:profinet轉ethernet ip網關×發那科×西門子的三國殺

跨協議探秘:profinet轉ethernet ip網關搞定川崎機器人與PLC通信

當機器人遇上“語言障礙”:CCLINKIE轉Profinet的“破冰外掛”來啦\\!
開疆智能Canopen轉Profinet網關連接工博士GBS20機器人配置案例
通信新思路:EtherCAT轉Profinet網關在自主研發機器人中的技術實踐與優化

靈能涌動,Profinet轉EthernetIP網關喚醒EthernetIP設備連接之力


從“零”到“聯”:Profinet轉Ethernet/IP網關搞定發那科機器手臂
開疆智能Profient轉DeviceNET主網關連接發那科機器人配置案例

ModbusTCP轉Profinet:ABB機器人與PLC的高效連接
開疆智能Profinet轉EthernetIP從網關連接ABB機器人做EtherNet主配置案例
三格電子-Profinet 轉EtherCAT主站網關

EtherNetIP轉Profinet網關連接發那科機器人配置實例解析

Profinet IO從站數據 轉EthernetIP項目案例





 工商網監
工商網監
評論