 EtherNet IP轉Profinet網關連接FANUC機器人配置指南(PROFIENT組態篇)
EtherNet IP轉Profinet網關連接FANUC機器人配置指南(PROFIENT組態篇)

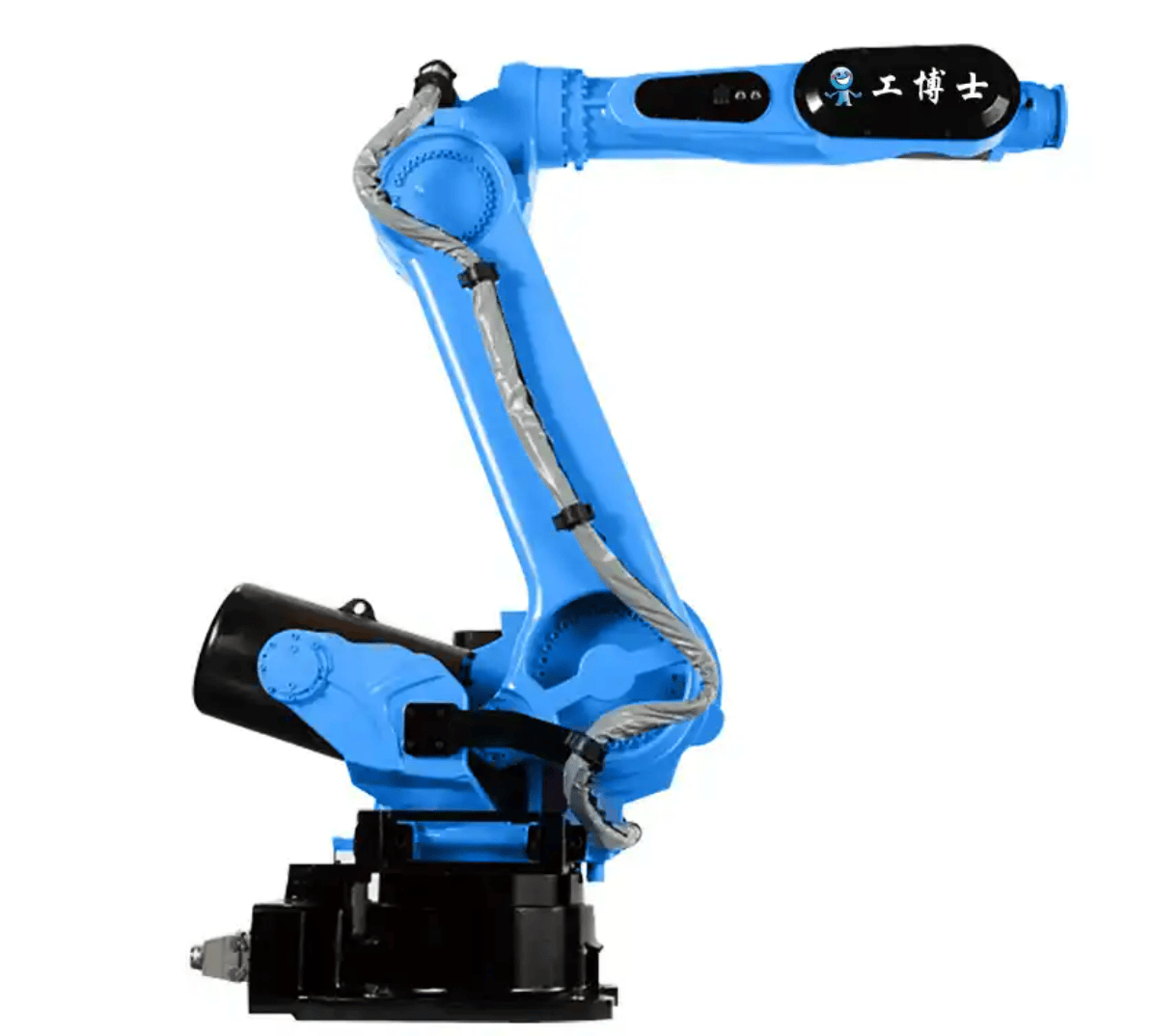
今天為大家分享穩聯技術profient轉ethernet ip(WL-ABC2006)網關與機器手臂西門子組態的分配過程。大致流程咱們一起看一下。

網關設備描述
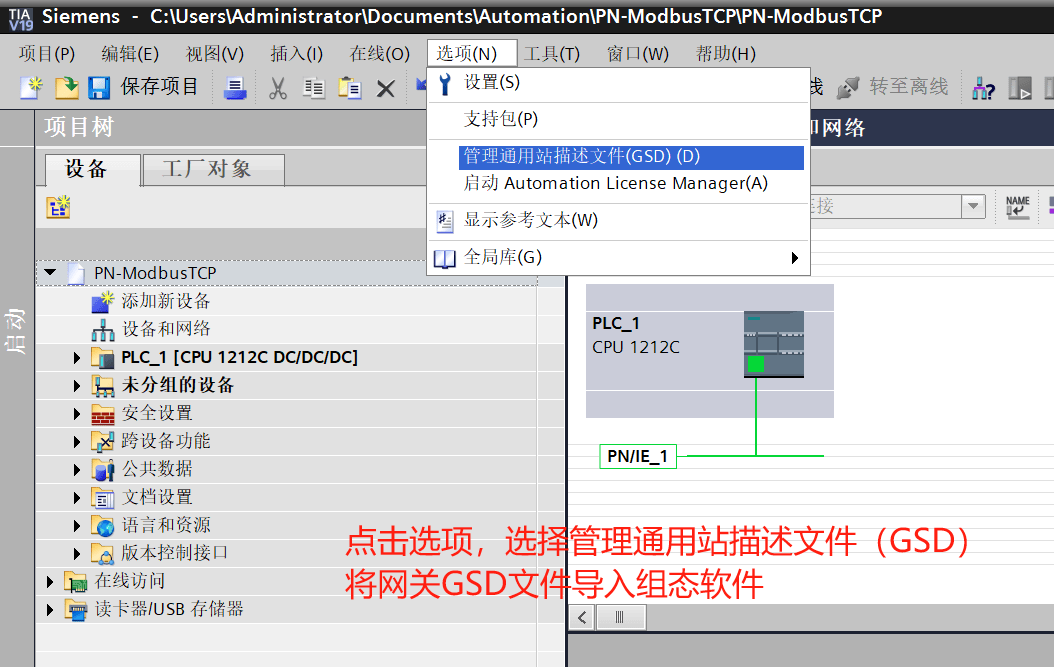
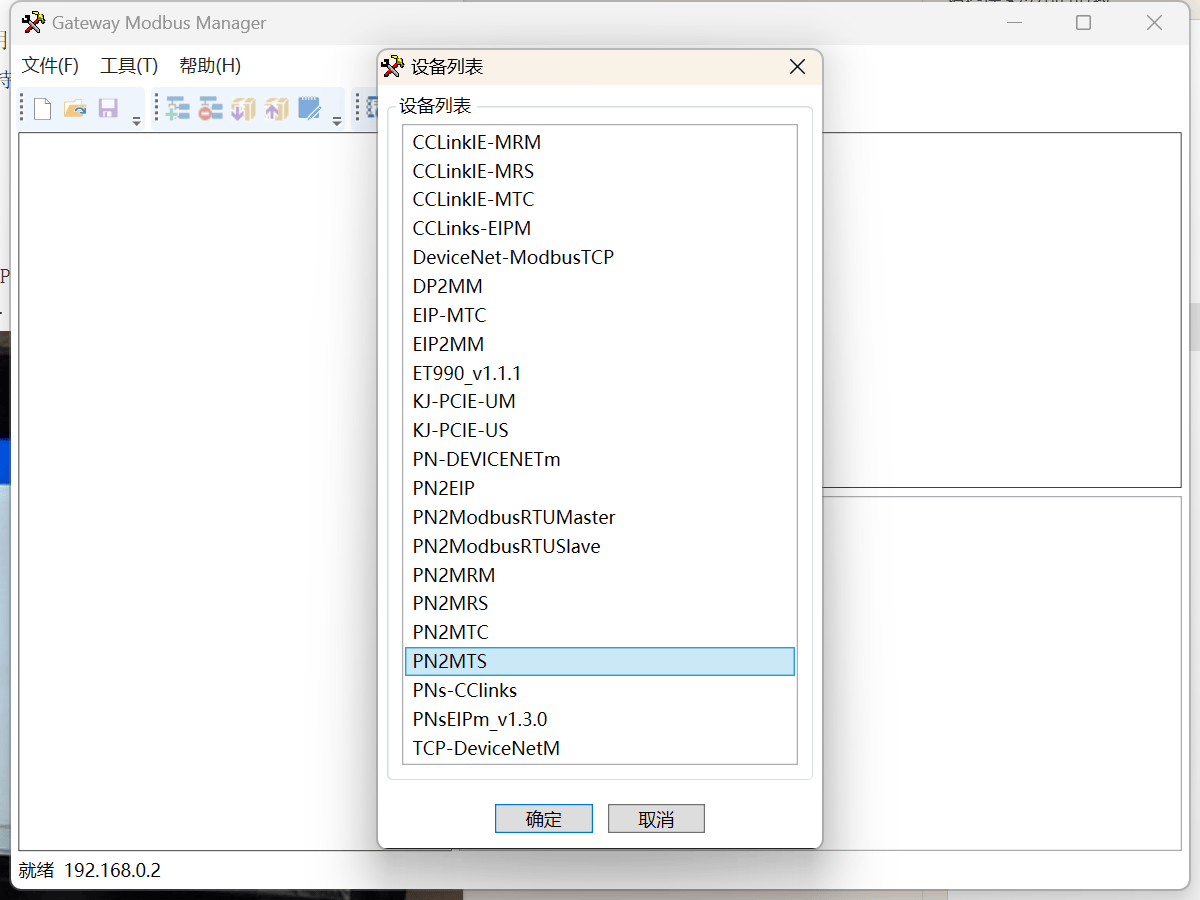
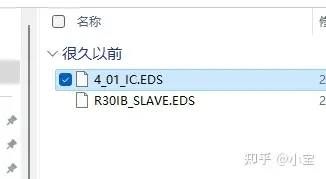
啟動 TIAPortal 開發環境,進入 “選項>管理通用站描述文件(GSD)”;選擇 “安裝”,加載網關廠商提供的GSD文件(*.xml格式)。
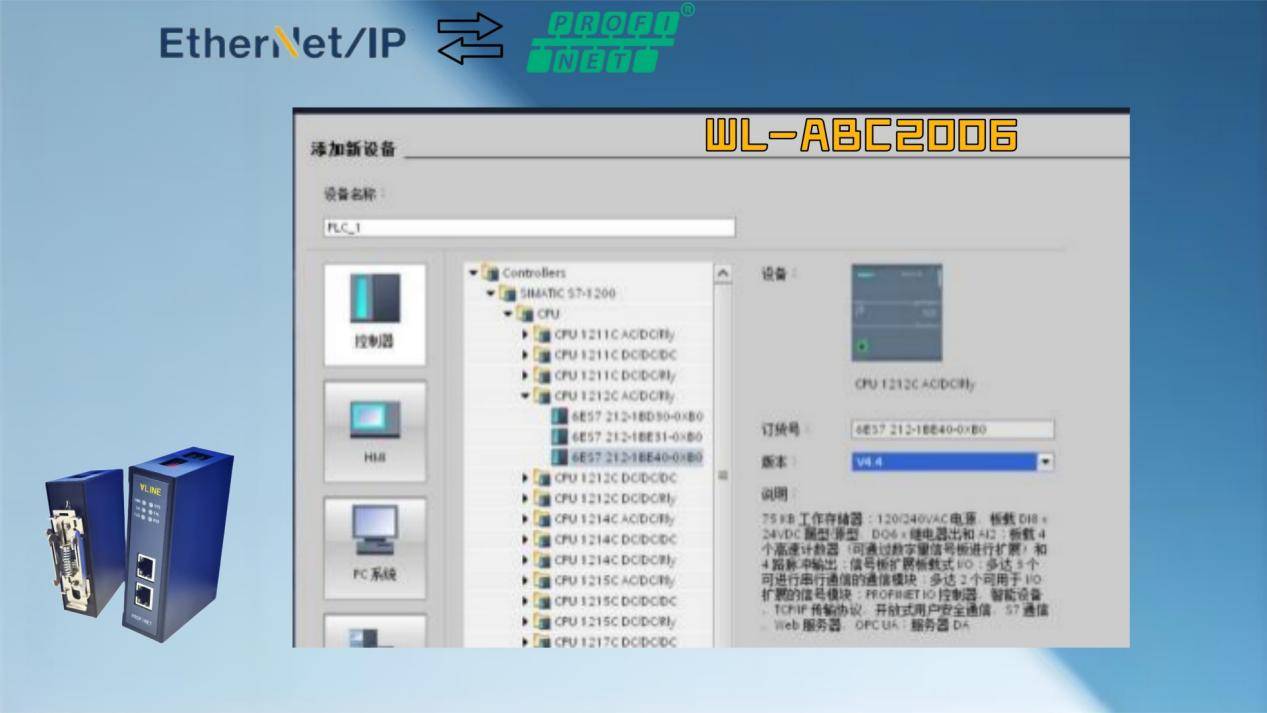
部署網關至Profinet網絡
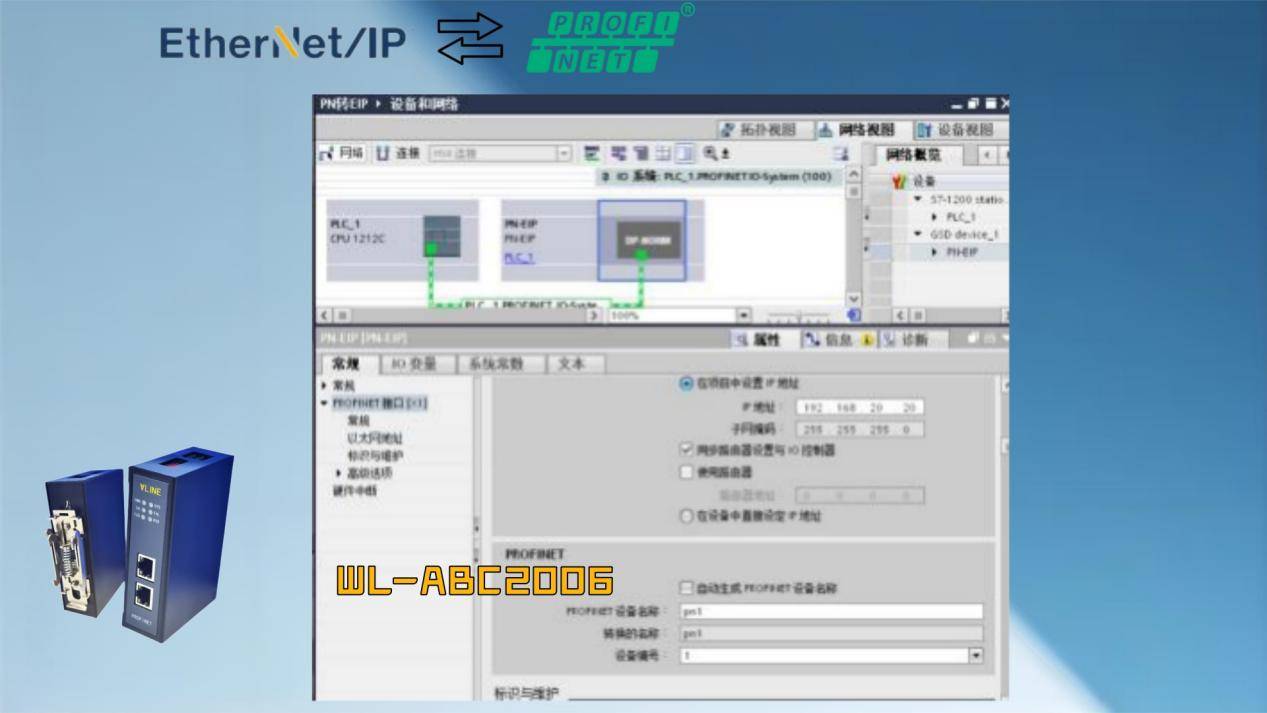
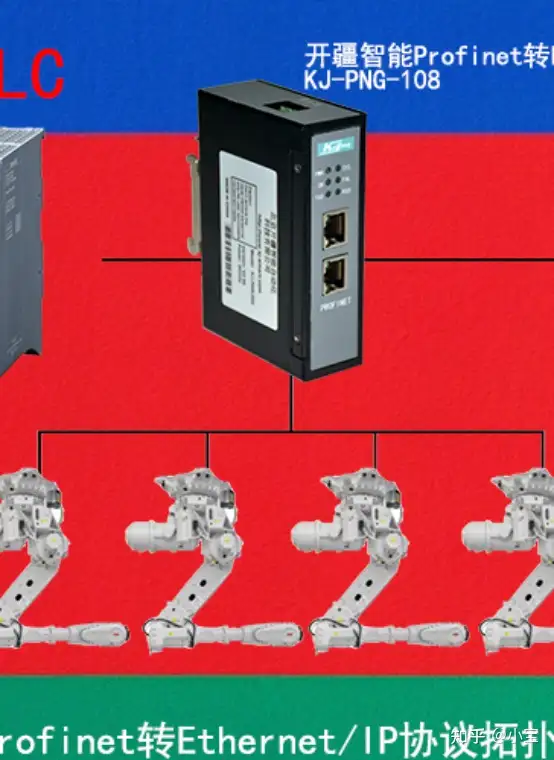
在 硬件目錄 中定位已安裝的網關模塊,拖放至Profinet網絡視圖;右鍵點擊網關設備,選擇 “分配邏輯名稱”,定義唯一標識符;配置穩聯技術profient轉ethernet ip(WL-ABC2006)網關網關Profinet接口 IP尋址(如192.168.1.100,需與PLC子網匹配)。
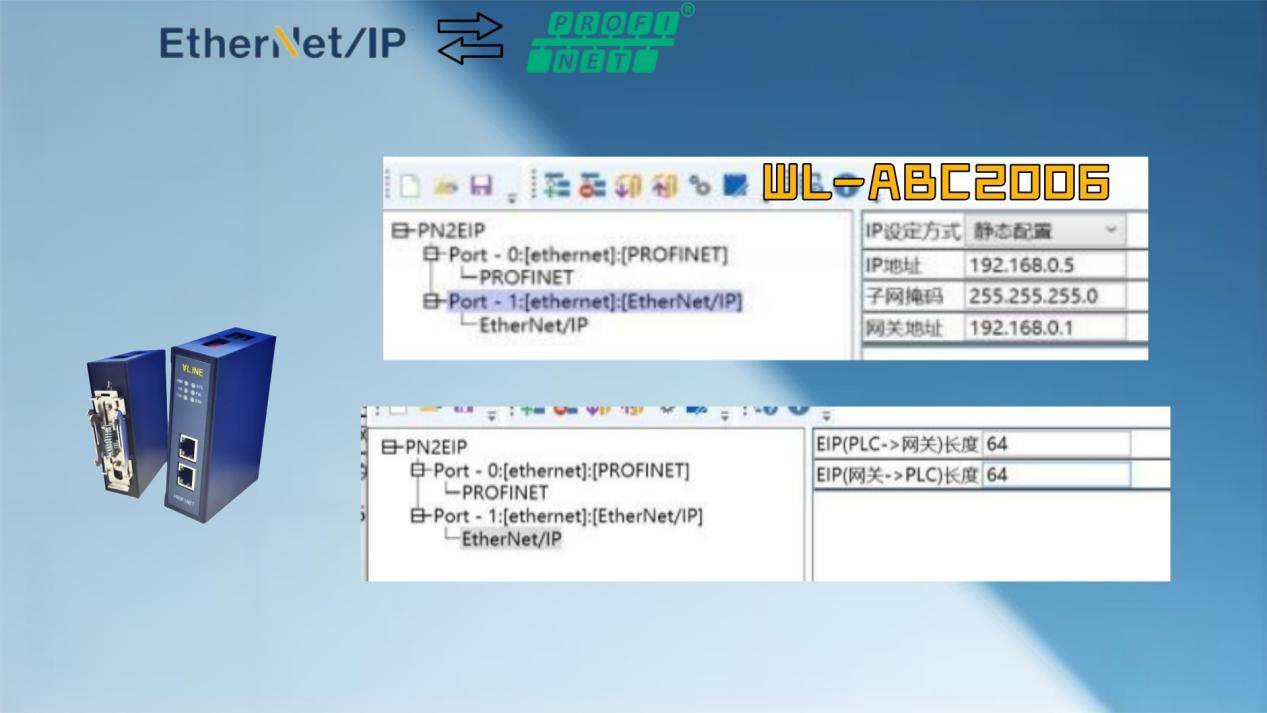
規劃輸入/輸出數據區域
擊啟網關模塊進入 “屬性>常規>輸入/輸出”;根據機器人通信需求,設定 輸入緩沖區大小(如128字節,用于狀態采集)和 輸出緩沖區大小(如128字節,用于指令下發);記錄系統自動分配的 I/O地址映射(如輸入區IW2000-IW2127,輸出區QW2000-QW2127)。

配置Profinet側參數
切換至 “Profinet參數” 選項卡:設備標識:輸入與PLC組態一致的名稱;IP尋址:設置與PLC網絡兼容的地址(192.168.1.100);子網掩碼:采用標準配置255.255.255.0。
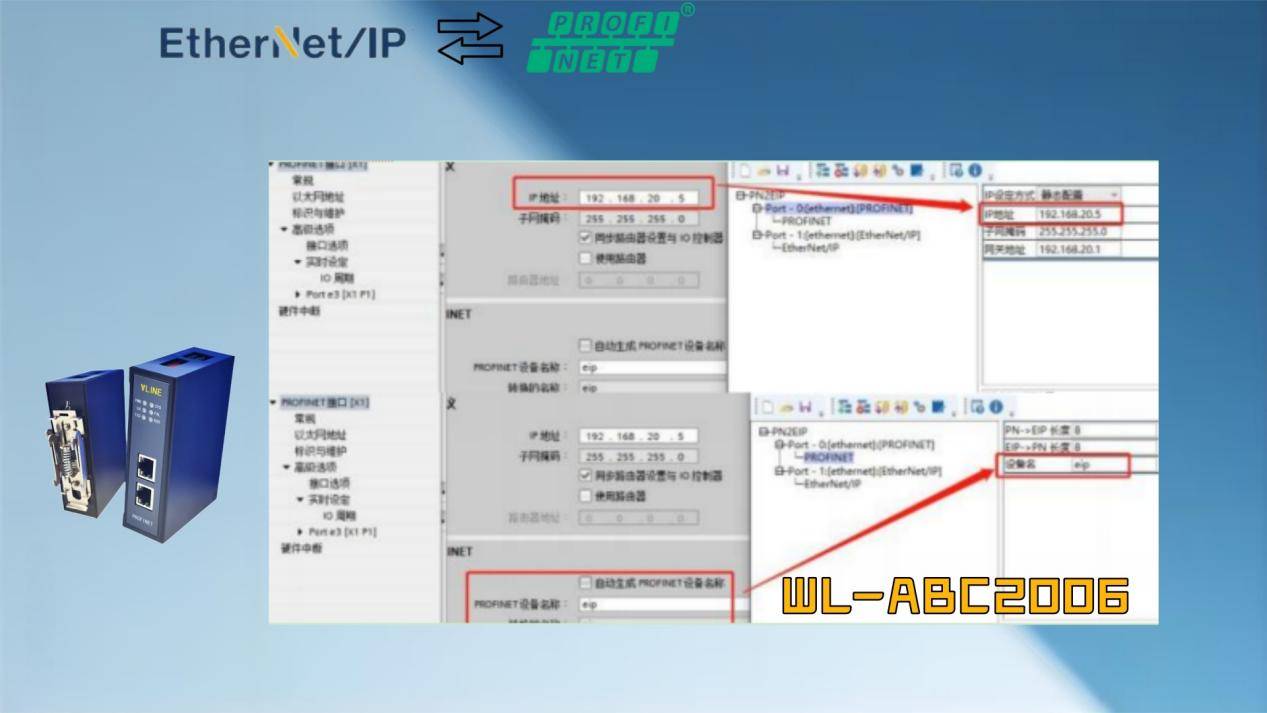
配置EtherNet/IP側參數(機器人端)
進入 “EtherNet/IP參數” 配置界面:目標IP地址:填入機器人控制器IP(如192.168.0.20);子網掩碼:與機器人網絡保持一致(如255.255.255.0);數據緩沖區:設置與PLC側匹配的輸入/輸出字節數(如各128字節)
建立數據映射關系
導航至 “數據映射配置” 界面:將 PLC輸出區(QW2000-QW2127) 映射至 EtherNet/IP輸入寄存器(對應機器人的輸入緩沖區);將 EtherNet/IP輸出寄存器(對應機器人的輸出緩沖區)映射至 PLC輸入區(IW2000-IW2127);支持按字/字節精度配置,確保地址嚴格對應(如PLC的QW2000映射至機器人的D100)。穩聯技術profient轉ethernet ip(WL-ABC2006)網關
PLC變量監控:
在TIAPortal中創建監視表,寫入測試值(如QW2000=1),驗證機器人是否響應對應動作;讀取IW2000數據,確認機器人狀態反饋(如坐標信息、運行模式)是否準確。
審核編輯 黃宇
-
機器人
+關注
關注
213文章
29664瀏覽量
212435 -
Profinet
+關注
關注
6文章
1663瀏覽量
25278 -
Ethernet
+關注
關注
3文章
468瀏覽量
56842
發布評論請先 登錄
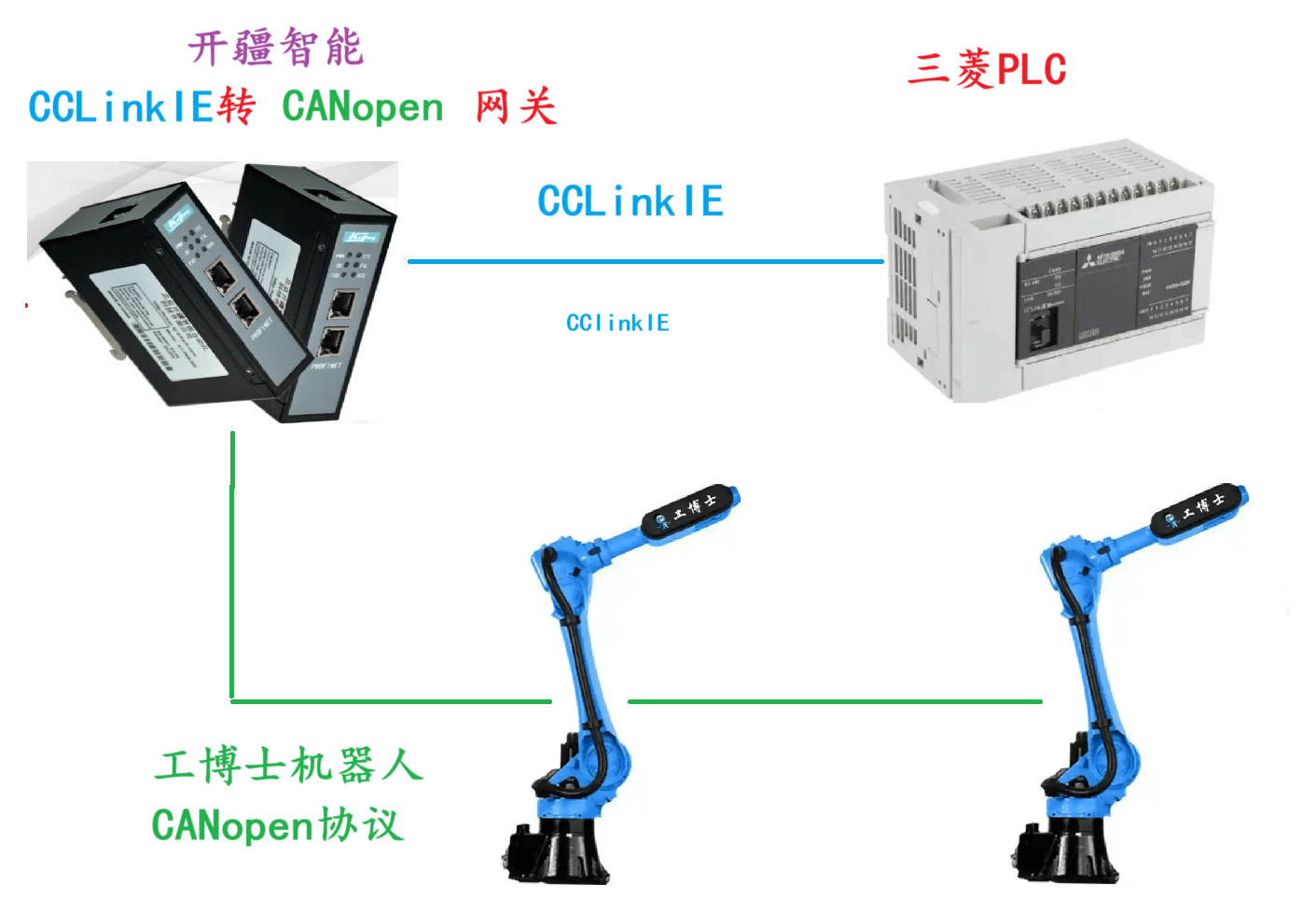
開疆智能CCLinkIE轉CANopen網關連接GBS20機器人配置案例
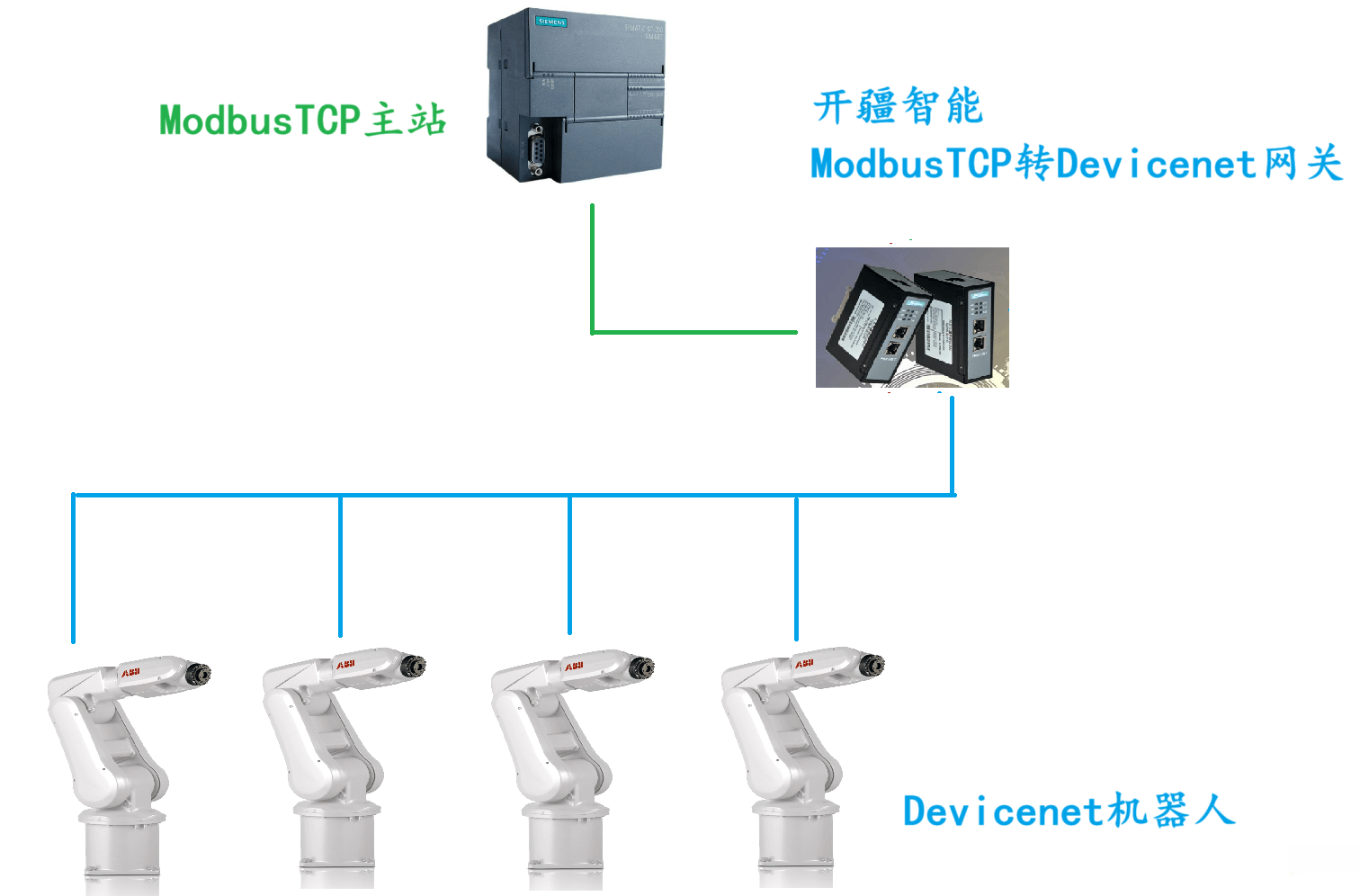
開疆智能ModbusTCP轉Devicenet網關連接FANUC機器人配置案例

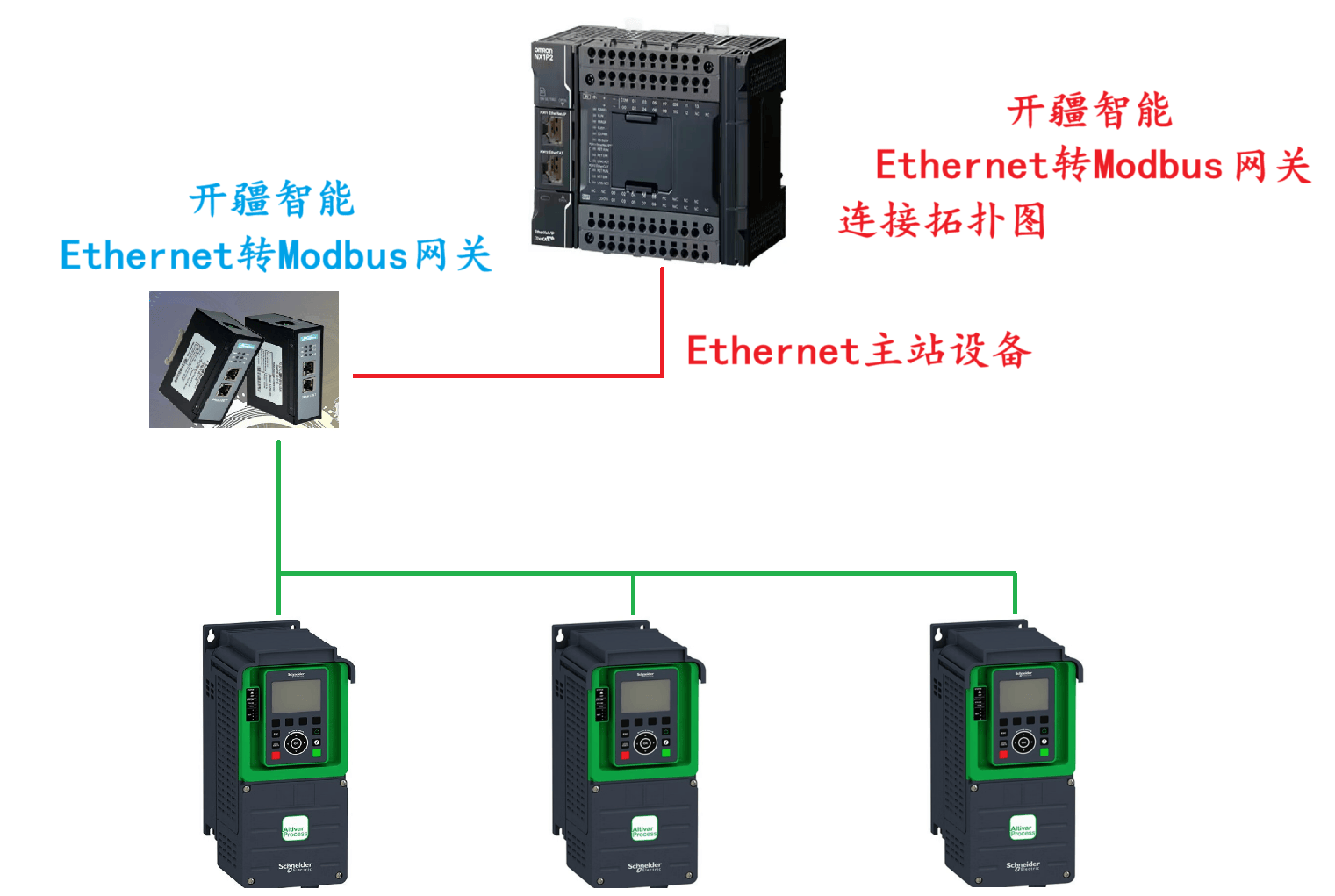
開疆智能Ethernet/IP轉Modbus網關連接變頻器配置案例
跨協議探秘:profinet轉ethernet ip網關搞定川崎機器人與PLC通信

開疆智能Profinet轉ModbusTCP網關連接BORUNTE伯朗特系統配置案例
開疆智能Profinet轉ModbusTCP網關連接WINCC配置案例
汽車裝配又又又升級,ethernet/ip主轉profinet進階躍遷指南

開疆智能Canopen轉Profinet網關連接工博士GBS20機器人配置案例
開疆智能Profient轉DeviceNET主網關連接發那科機器人配置案例
開疆智能Profinet轉EthernetIP從網關連接ABB機器人做EtherNet主配置案例
開疆智能Ethernet/IP轉Profinet網關連接納博特控制器配置案例
EtherNetIP轉Profinet網關連接發那科機器人配置實例解析

Profinet轉EtherNet/IP主站協議網關(Profinet轉EtherNet/IP)

Profinet轉EtherNet/IP主站協議網關(JM-EIPM-PN)





 工商網監
工商網監
評論