 詳細解析應用于自動駕駛中的激光雷達
詳細解析應用于自動駕駛中的激光雷達

前面的文章中我們已經介紹了幾個重要的感知傳感器——攝像機,毫米波雷達等。攝像機作為視覺傳感器,能為無人車提供豐富的感知信息。但是由于本身感知原理的缺陷,導致攝像機的測距并不是那么準確。長遠來說,激光雷達配合毫米波雷達, 再加上視覺環境感知的綜合方案才能真正做到無人駕駛。因此,工程師們引入了激光傳感器。這就是我們常在Level 3級別以上的無人車上看到的設備。比如通用用于研究Level 4級別自動駕駛技術的Bolts,就在車頂上頂了好多激光雷達。
如下圖所示,激光雷達的發射器發射出一束激光,激光光束遇到物體后,經過漫反射,返回至激光接收器,雷達模塊根據發送和接收信號的時間間隔乘以光速,再除以2,即可計算出發射器與物體的距離。
最早的激光雷達主要用于測繪,我們就從機載激光雷達的歷史來了解一下激光雷達的發展歷程。
激光雷達(LiDAR),最早的機載激光雷達是一種主動式對地進行三維直接觀察和測量的技術,因此我們可以使用它晝夜工作。隨著計算機技術、GPS和其自身技術的發展和完善,機載激光雷達最近幾年受到了越來越多的重視。
LiDAR是從英文短語Light DetectionAnd Ranging中提取出來的。我們望字生意,很容易把LiDAR與雷達(RADAR)聯系起來。而Light DetectionAnd Ranging與Radiowave Detection And Ranging確實是一對孿生兄弟。在雷達中,我們采用的是無線電波,而在LiDAR中,我們采用的是激光器發射的可見和近紅外光波,在大氣和環境研究中,也會采用其它波段的光波。因此,有時我們又將LiDAR稱作激光雷達。
激光雷達的工作原理與雷達非常相近。早期的機載激光雷達由激光器發射出的脈沖激光由空中入射到地面上,打到樹木上,道路上,橋梁上,房子上,引起散射。一部分光波會經過反射返回到激光雷達的接收器中。接收器通常是一個光電倍增管或一個光電二極管,它將光信號轉變為電信號,記錄下來。同時由所配備的計時器記錄下來同一個脈沖光信號由發射到被接收的時間T。于是,就能夠得到由飛機上的激光雷達到地面上的目標物的距離R為: R = C*T/2。這里C代表光速,是一個常數,即C=300,000公里/秒。
激光雷達每一個脈沖激光的最大距離分辨率(maximum rangeresolution)也可由以下公式給出:⊿R = C/2·(tL+tN+tW)。這里,tL代表激光脈沖的長度,tN代表接收器電子器件的時間常數,tW代表激光與目標物體的碰撞時間常數。對于一個Q-開關的Nd:YAG激光器,它的脈沖常數是10納秒,接收器電子器件的時間常數stN一般是50納秒到200納秒,激光與目標物體的碰撞時間常數tW較小,一般忽略不計。因此,距離分辨率⊿R一般在7.5米到30米。
激光雷達的研發早在上個世紀的七十年代就開始了(Jennifer andJeff 1999)。最初,是由美國的航天航空總署NASA研究出了一種非常笨重的基于激光測量的設備。盡管它非常昂貴,也只能測量放在地面上的飛機的精確的高度。在八十年代后期,隨著GPS民用技術的提高,使得GPS對位置定位的精度達到了厘米的量級。高精度的用于記錄激光來回時間的計時器和高精度的慣導測量儀(InertialMeasurement Units,IMU)的相繼問世,為激光雷達的商業化打下了基礎。
在上個世紀的八十年代末,德國的Peter Frieβ和JoachimLindenberger在Deutsche Forschungsgemeinschaft攻讀博士學位時開始了有關激光雷達技術的研究課題。在1989年,他們與Fritz Ackermann教授一起在Univ. ofStuttgart (斯圖加特大學遙感學院)進行了首次相關的試驗飛行。測試結果令人信服地顯示出激光雷達用于地形地貌測量和制圖方面的巨大的潛力和發展遠景。
1992年,在獲得了博士學位后,Peter Frieβ和JoachimLindenberger成立了TopScan GmbH公司,開始了商業化機載激光雷達的嘗試。很快,TopScan開始了與位于加拿大多倫多市的Optech公司的合作,并且在1993年聯合進行了樣機的試飛和測試。1995年,由Optech公司與TopScan共同推出了ALTM1020激光雷達,并在1997年對其性能進行了全面的提高,激光發生的頻率由200赫茲提高到5000赫茲,飛行高度也達到了1000米。
與此同時,德國的TopSys也開發出了基于光纖激光器的激光雷達,Falcon I。從1995年到2003年的八年間,Optech共銷售了15臺ALTM1020和ALTM 1225激光雷達(ChristianWeaver, and Joachim Lindenberger)。而TopSys除了自己使用外,一共向外賣出了兩臺Falcon I和Falcon II。期間,TopScan也轉向了向用戶提供激光雷達服務的主業。Optech公司在2004年和2006年又分別推出了能夠發射在1000米的高度發射100,000赫茲的ALTM3100和具備在接近2000米的高度時發射100,000赫茲的ALTMGemini。
在1997年的時候,針對已有激光雷達的不足之處,成立于1956年的專門從事制圖和GIS服務的Azimuth也進入了這個新興的行業,并且在技術方面進行了一些提高,于1999年向市場推出了AeroSensor激光雷達(Kevin P.Corbley)。Azimuth公司位于美國馬薩諸塞州,由于公司規模小,她采取了積極開放的態度,與美國科羅拉多州的EnerQuest合作,由EnerQuest推出RAMS激光雷達,在1999年先后賣給了日本和澳大利亞的客戶。同時,EnerQuest公司在Robert Kletzli的帶領下,首先研發出了配備數碼相機的RAMS激光雷達,并且用于2000年的悉尼奧運會。
2001年的5月,萊卡公司通過收購Azimuth公司,開始進入此領域,并將AeroSensor改名為ALS40。當時,萊卡公司已經向市場引進了推進掃描式的數碼相機ADS40,藉希望于把ADS40與ALS40結合起來使用。由于Azimuth規模小,剛成立不久,所以在被收購前,一共只賣了若干臺,其中還包括RAMS系統。萊卡公司在2003年推出了ALS50,2006年初升級為ALS50-II。為了提高激光點的密度,萊卡公司在2006年十月的INTERGEO大會上,又推出了一項新技術:MultiplePulses in Air (MPiA)。它使得激光雷達不需要等待是否收到了上一個信號后才發出下一個新信號,因此信號接收器能夠從同一個激光脈沖信號周期里接收到多于一個以上的信號,因而在激光器不變的情況下,在更高的高度上可接收到更多的激光點。
在上個世紀的九十年代初,一個瑞典的公司Saab接收了瑞典國防部的合同,研究用于追蹤潛艇的激光雷達系統。在1994年和1995年,Saab公司分別向瑞典海軍和瑞典海岸線管理局兩套HAWK Eye激光雷達系統。HAWK Eye激光雷達系統也是世界上個用于水下探測的激光雷達系統。在2002年,Saab公司把生產HAWK Eye激光雷達系統的技術轉讓給由三個前雇員成立的AHAB公司。2005年6月,Blom公司收購了AHAB。在2005年,AHAB公司向市場推出了HAWK Eye II系統,客戶包括挪威的Blom公司和皇家海岸線測繪公司。HAWK Eye II系統采用了兩個激光器,一個是用于水下探測的采用532納米波長的激光器,激光接收頻率為4000赫茲;另一個是用于海岸線測量的近紅外激光器,激光接收頻率為64000赫茲。飛行高度為200米到400米之間。一般使用直升飛機作為載體。
這里我們要提到一個在激光雷達發展史上另一個重要的公司:Riegl。Riegl公司位于奧地利首都維也納東北角80公里的一個叫Horn(號角)的小鎮。她是由維也納技術大學的Riegl教授于1975年創立的,起初專門生產固體二極管激光器及激光測距儀。從1996年開始,向市場推出了可用于機載、車載和船載的一系列二維激光掃描儀:LMS-Q140,LMS-Q140i, LMS-Q160, LMS-Q120, LMS-Q240, LMS-Q240i, LMS-Q280, LMS-Q280i,LMS-Q560。射程涵蓋近距離2米-100米、低空(2米-400米)、中低空(30-700米)和中高空(30米-2000米)。
我們知道,Optech和萊卡的激光雷達由于問世較早,為了追求飛行的高度而采用了大功率的對于人和動物眼睛會有傷害的激光器。當在中低空飛行時,為了減少傷害,采用了降低功率輸出、增大光斑尺寸等措施,因而直接造成了空間分辨率的下降。這里我們要指出的是,所有的Riegl激光掃描儀均使用對人和動物眼睛安全的激光器,因此無論是低空飛行還是2000米的中高空飛行,均不需要對激光的輸出做任何的調整,保持了測量的高精度。我們高興的看到,Optech公司已經在其用于地面的三維激光雷達系統中改用對人和動物眼睛安全的激光器,因此,隨著激光器研究的進一步發展,全面采用對人和動物眼睛安全激光器的機載激光雷達已經為時不遠。
由于種類繁多,性價比高,在歐洲和北美的許多地方得到了廣泛的應用,尤其是電力、公路,鐵路、林業、礦山、城市規劃、海岸線、考古等領域。許多公司、大學和研究單位以及政府部門紛紛使用Riegl的二維激光掃描儀來自己組裝激光雷達。
其中,Riegl公司于2004年推出的LMS-Q560是世界上第一款商業化的能夠進行數字化采集和處理激光全波形的二維激光掃描儀。雖然每一個激光脈沖都是一個周期為2π的正弦波,但是由于技術的限制,過去只能將接收到的正弦波信號提取為幾個分立的信號,放棄了許許多多的細節。能夠進行數字化全波形的采集、記錄和處理的LMS-Q560使得我們能夠更多地看到物體表面的細節、粗糙度和變化。諸如房頂和房沿,江河岸邊等斷點線,茂密植被覆蓋下的地區的地形地貌在過去一直是令人頭痛的事情,因為采用時間-飛行原理(TOF,Time Of Flight)的激光雷達很難通過空隙成功地入射到地面上,同時,即使最先進的濾波幾何學在面對如此的激光點云進行分類時,也經常出錯。然而,采用數字化記錄全波形的方法已經證明,即使茂密植被漏出百分之幾的空隙,通過所獲取的全波形反射波,我們也能夠得到在激光腳印的區域內垂直方向結構和地面形貌的詳細細節。它是機載激光雷達發展史上的一個里程碑。
Riegl公司最新推出的CP560激光雷達,不僅能夠飛超低空(30米),而且能夠飛2000米的高度,激光的最大發射頻率為240,000赫茲,可接收到的激光點達到了160,000/秒。配備雙激光器的BP560激光.雷達,激光的最大發射頻率達到了400,000赫茲。另外,基于Riegl的激光掃描儀和自己的飛行管理和導航系統,德國的IGI開發出了LiteMapper 2800和LiteMapper 5600激光雷達,德國的iMAR研發并向智利出口了AIRSURV-LS1000(RieglLMS-Q560)。TopSys研發了基于美國天寶公司的導航系統的Harrrier 24 (基于Riegl LMS-Q240)和Harrier 56 (基于Riegl LMS-Q560)。
目前市場上的激光雷達的激光發射的最大頻率范圍為10,000赫茲—240,000赫茲。均為Riegl公司所生產。Optech公司和萊卡公司的激光器的最大發射頻率分別是160,000赫茲和150,000赫茲。TopSys的是125,000赫茲。在2008 ISPRS會議上,徠卡公司推出了新的ALS60系統,其激光器的最大發射頻率為200,000赫茲。另外,Riegl公司也在2008 INTERGEO會議上推出新的激光雷達系統。
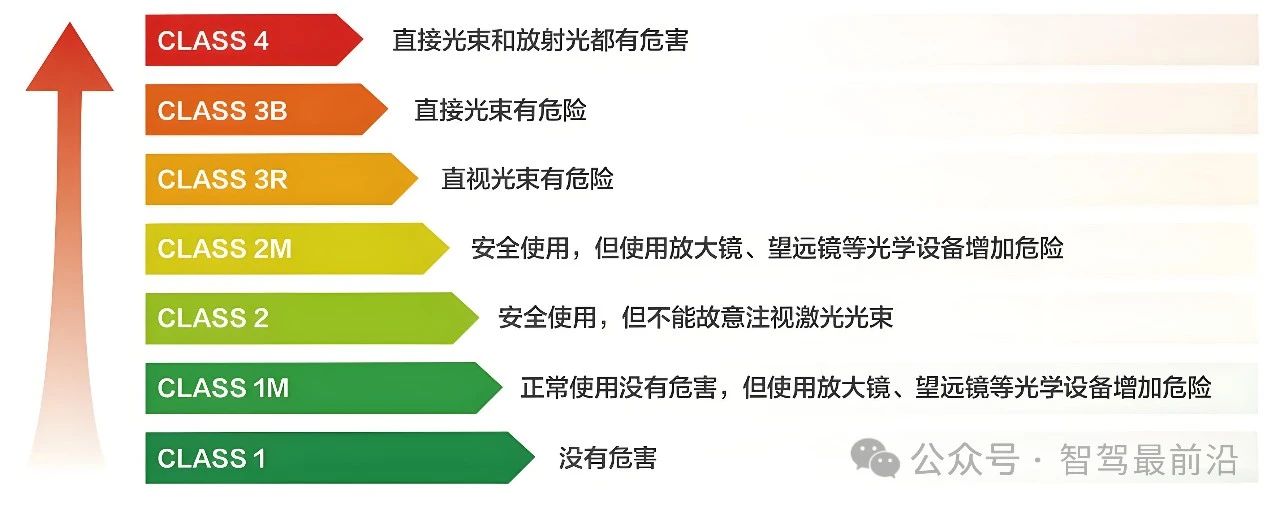
萊卡和Optech公司采用的是大功率的波長為1064納米的安全等級為IV級(I級是最安全的,II級以上越來越不安全)的Nd-YAG激光器。當低空飛行時,就必須增大激光的光斑,并且采用強度衰減器來降低輸出激光的強度。而Riegl公司和TopSys公司采用的是對人和動物眼睛安全的波長為1550納米的近紅外激光器。因此無論是低空飛行還是中高空飛行都不需要增大激光的光斑和衰減激光的強度。
-
傳感器
+關注
關注
2567文章
53143瀏覽量
768817 -
激光雷達
+關注
關注
971文章
4244瀏覽量
193107
原文標題:自動駕駛技術之——LiDAR初解
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
從自動駕駛到具身智能,激光雷達緣何一邊被嫌棄,一邊被追捧?
自動駕駛只用激光雷達進行感知會有哪些問題?
自動駕駛激光雷達之間會相互干擾嗎?
激光雷達在自動駕駛領域中的優勢

激光雷達在自動駕駛中為何不可替代?

激光雷達調研紀要
愛普生高精度車規晶振助力激光雷達自動駕駛

自動駕駛中的激光雷達是否會傷害人眼?
激光雷達技術:自動駕駛的應用與發展趨勢

禾賽激光雷達助力寶馬智能工廠自動駕駛
激光雷達光電組件的AEC-Q102認證:保障自動駕駛硬件的可靠性與品質
毫米波雷達與激光雷達比較 毫米波雷達在自動駕駛中的作用
激光雷達在自動駕駛中的應用
激光雷達與純視覺方案,哪個才是自動駕駛最優選?
激光雷達濾光片:自動駕駛的“眼睛之選”






 工商網監
工商網監
評論