 純硬件電路控制的多功能智能小車的設計
純硬件電路控制的多功能智能小車的設計
引 言
當前的電動小車基本上采取的是基于純硬件電路的一種開環控制方法, 這種電動小車雖然也具有直線行駛、前進、后退、轉彎、停車等基本功能,但在某些特殊場合,電動小車卻無法采集到自動化控制領域的有用信息。在這種情況下,就需要開發用于自動化控制領域的智能小車。為此,本文以ATmega16 單片機為控制核心,用RF2401 無線收發模塊進行遙控通信,同時用DS18B20 進行溫度檢測,并采用超聲波等傳感器材來檢測信號和障礙物,最后利用單片機的串口資源和運算、處理能力,開發設計了一種智能控制系統,從而實現了小車的測溫、躲避障礙物等功能。
1 總體方案及器件的選取
1.1 總體方案
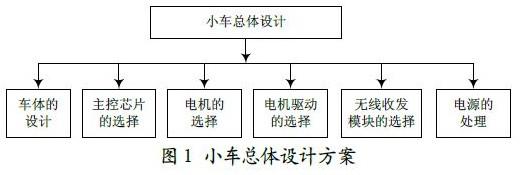
本系統以單片機為核心,增添其他外圍設備,如雙電源模塊、超聲波探測器、顯示模塊、無線收發模塊等,以兩個直流電機經過減速箱作為驅動,通過主控單元來處理傳感器上信號,處理數據后完成相應的操作,以實現相應的功能。
小車總體設計方案如圖1 所示。
1.2 器件的選取
本設計的車體設計由筆者制作。主控芯片采用Atmel 公司推出的高性能、高速度、低功耗的ATmega16 AVR 單片機作為電動車的主控制芯片;電機選擇使用控制方法較為簡單的直流減速電機作為電動車的驅動電機;電機驅動選擇可直接對電機進行控制,而無須隔離電路的L298N 作為電機驅動芯片。
2 硬件實現
2.1 ATmega16 單片機
AVR 單片機是Atmel 公司推出的較為新穎的單片機,其顯著的特點為高性能、高速度、低功耗。
而ATmega 系列是AVR 單片機中的高端產品。單周期可執行本指令功能,同時完成下一條指令的讀取。通常時鐘頻率用6~16 MHz,故最短指令執行時間為250~125 ns.還有I/O 第二功能,內部有時鐘電路、10 Bit AD 功能,片內資源很豐富。
2.2 ATmega16 最小系統圖ATmega16 單片機的最小系統如圖2 所示。
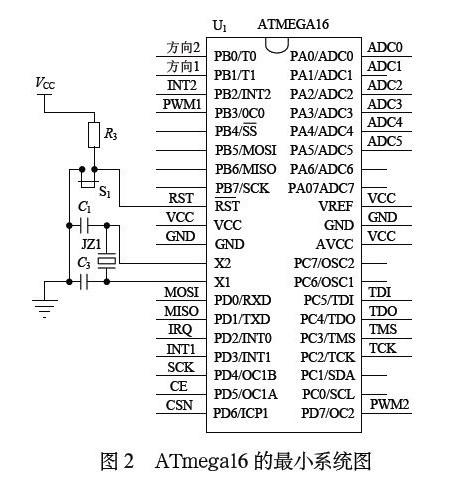
最小系統主要包括晶振電路、電源電路、復位電路等。
2.3 電機驅動部分
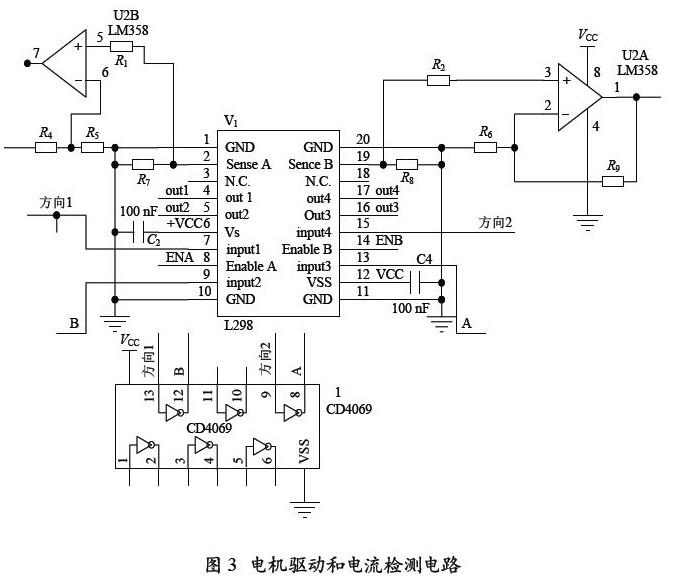
該模塊主要由L298 芯片來控制兩個電機的正反轉,以及改變電機的轉速。L298 芯片是一種高壓、大電流雙全橋式驅動器。其中,SENSEA、SENSEB 分別為兩個H 橋的電流反饋腳,不用時可以直接接地。
VCC、VS 接電源引腳,電壓范圍分別是4.5~7 V、2.5~46 V,設計中VCC 端與單片機電源端共用5 V 工作電源,VS 端獨立地接9 V 電源。ENA、ENB 為使能端,低電平禁止輸出。IN1、IN2、IN3、IN4 為數據輸入引腳,OUT1、OUT2、OUT3、OUT4 為數據輸出引腳。根據L298N 的引腳和輸出引腳的邏輯關系,將IN1、IN2 經過非門連接,IN3、IN4 經過非門連接,即IN1 和IN2 永遠是相反的,一高一低,IN3、IN4 也一樣,通過改變ENA、ENB 就能分別改變左右輪的速度。
在SENSEA、SENSEB 端輸出采集電壓信號, 再經過LM358 運放放大,送給ADC 處理,即可得到電機的工作電流,具有過流保護功能。圖3 所示為系統電機驅動電路和電流檢測電路。
2.4 穩壓電源部分和外接傳感器部分
設計時,可采用7805 穩壓芯片為電路提供穩定的5 V 電壓,1117 芯片為電路提供3.3 V 電壓。由于本系統的電源電路比較簡單,而且應用也比較廣泛,所以本文就不詳細介紹了。
系統中的傳感器包括溫度傳感器DS18B20、霍爾元件速度傳感器等,其電路都比較簡單。因此,只需在電路板上預留3 線接口,即電源、接地、數據。
2.5 顯示部分
本系統使用LCD12864 作為電路顯示元件,LCD12864有20 個引腳,圖4 所示是LCD12864 的驅動電路圖。
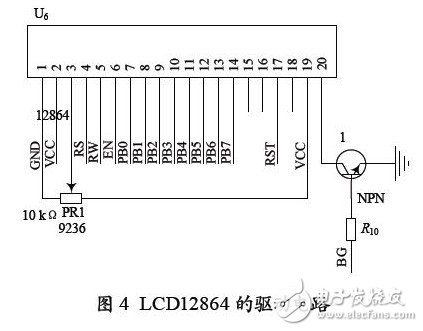
本設計采用8 位數據線并行口方式驅動,三根控制線為RS( 命令/ 數據選擇)、R/W( 讀/ 寫控制)、EN( 使能端),背光通過三極管驅動,采用PWM 來控制背光亮度。
3 小車程序設計
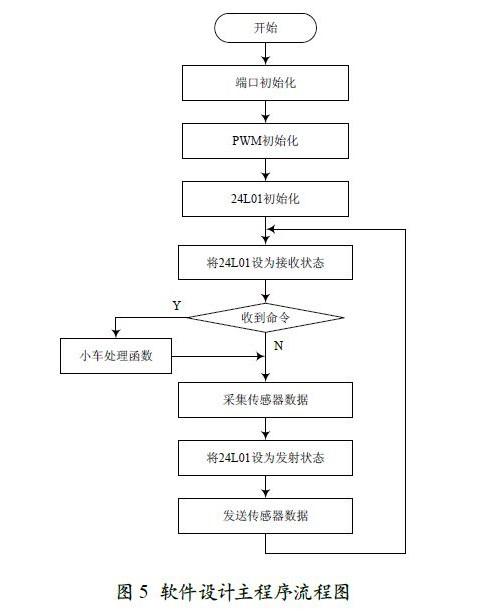
小車程序設計時,首先進行端口初始化,然后進行PWM初始化,再NRF24L01 初始化,將NRF24L01 設為接收狀態。
收到命令,則執行小車的相應函數,否則,采集傳感器數據。
然后設置NRF24L01 為發射狀態,以發送數據。發送完畢,再將NRF24L01 設置為接收狀態。圖5 所示是其系統主程序流程圖。
4 結 語
目前,市面上尋跡的、避障的,多傳感器數據融合等基于單片機編程的智能小車已經發展開了,用于玩具、大學生實踐比賽、工業數據檢測,以及用于生活的智能電動小汽車也已有了一定發展,在充滿環保、節能、科技的未來社會,智能小車的應用將無處不在。
本課題主要研究了多功能智能小車的技術,多功能智能小車的研制課題涉及到機械電子、傳感器技術、驅動控制技術、人工智能等多個領域的研究及技術融合。本課題研制的演示系統高度的智能化、人性化,并且具備良好的安全性和環保性。
-
傳感器
+關注
關注
2554文章
51607瀏覽量
757925 -
單片機
+關注
關注
6044文章
44651瀏覽量
640183 -
電源模塊
+關注
關注
32文章
1732瀏覽量
93344
發布評論請先 登錄
相關推薦
Simcenter SCADAS Recorder多功能數據采集系統

多功能焊接能量監測儀:精準控制,高效作業
如何選擇讓自己滿意(適合)的agv小車?純干貨分享
自適應藍牙控制智能小車
第13章-循跡功能 STM32智能小車循跡教程 PID循跡算法分析

【項目展示】基于CW32的遙控循跡小車

AGV小車升降平臺控制板
使用多功能數顯表的步驟 使用多功能數顯表的注意事項

如何設計一款四輪智能小車

適合車載多功能GPS的工業級連接器
固態繼電器應用電路之多功能控制電路






 工商網監
工商網監
評論