 電子發(fā)燒友App
電子發(fā)燒友App


運動控制器的工作原理及應(yīng)用
我們以運動控制器在數(shù)控系統(tǒng)中的應(yīng)用及工作原理來詳解。
傳統(tǒng)的數(shù)控機床的控制方式主要有繼電器控制、單片機控制與PLC控制幾類。現(xiàn)階段數(shù)控系統(tǒng)逐漸向開放性的趨勢發(fā)展,繼電器,PLC和單片機的擴展性和可移植性都比較差,不能夠滿足數(shù)控系統(tǒng)的發(fā)展要求。近年來,運動控制器得到了廣泛的應(yīng)用,它具有開放性好、可移植性好、可靠性高、控制功能強、體積小且性價比高等諸多優(yōu)點,經(jīng)過發(fā)展,運動控制器幾乎應(yīng)用于所有的工業(yè)企業(yè)中。運動控制器既可以應(yīng)用于傳統(tǒng)機床的數(shù)控化改造,也可以應(yīng)用于新型數(shù)控機床的設(shè)計,降低成本、節(jié)約能源并且提高效率。本文以機械手的控制系統(tǒng)為例,介紹了基于運動控制器的數(shù)控系統(tǒng)設(shè)計。
1、數(shù)控系統(tǒng)總體方案
如圖1所示,整個數(shù)控系統(tǒng)由硬件和軟件兩部分組成,硬件部分又分為控制系統(tǒng)硬件和電氣控制柜。控制系統(tǒng)硬件包括運動控制器、I/O(輸入/輸出)接口、驅(qū)動模塊和執(zhí)行模塊,這部分是數(shù)控系統(tǒng)硬件的核心部分;電氣控制柜由動力電路、控制電路和信號指示電路等組成。由于現(xiàn)有的運動控制器體積較小,集成度較高,也可以直接將其放置于電氣控制柜中。數(shù)控系統(tǒng)的軟件編寫與硬件有一定的關(guān)系,一般運動控制器和觸摸屏等都會提供編程工具與編程語言,用戶根據(jù)不同需求使用所提供的編程工具與編程語言進行軟件設(shè)計。
2、機械手工作原理

圖1 數(shù)控系統(tǒng)總體方案圖
本文中的機械手指搬運機械手,所要完成的工藝流程一般是將工件從一個指定位置運送到另一個指定位置,機械手工藝流程如圖2所示。數(shù)控系統(tǒng)在工作之前,機械手位于設(shè)定的原點,整個系統(tǒng)有上下左右4個限位開關(guān),分別接入運動控制器中的4個不同輸入點。數(shù)控系統(tǒng)工作時,機械手由原點向下運動,碰到下限位開關(guān)后停止運動,機械手抓取工件,為保證機械手能夠可靠的夾緊工件,需使用數(shù)控系統(tǒng)延時功能,在夾緊2s后再繼續(xù)向上運動,其余三方向同理,最后機械手松開工件,放在指定位置。為保證機械手能夠可靠的放置工件,使用數(shù)控系統(tǒng)延時功能,在松開2s后再繼續(xù)向上運動,碰到上限位開關(guān)后繼續(xù)向左運動,回到原點后進行下一次抓取與放置。
機械手搬運分為自動和手動兩種模式,在自動模式下,無需人為干預(yù),系統(tǒng)全自動運行;在手動模式下,操作者可以根據(jù)自己的需求控制機械手的動作。
3、數(shù)控系統(tǒng)硬件設(shè)計
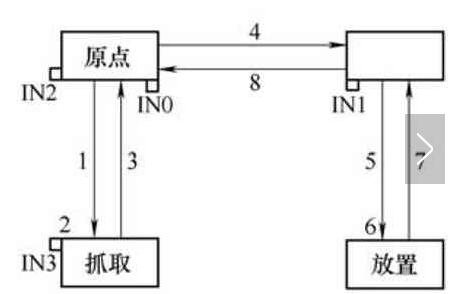
圖2 機械手工藝流程圖
數(shù)控系統(tǒng)硬件主要包括運動控制器、伺服驅(qū)動系統(tǒng)、氣動夾緊機構(gòu)、觸摸屏以及其他擴展模塊和輔助硬件。數(shù)控系統(tǒng)硬件設(shè)計如圖3所示。
(1)數(shù)控系統(tǒng)硬件設(shè)計。運動控制器選用英國Trio控制器,采用32-bit的120~150MHz的DSP的最新的微處理器技術(shù),融合了最新的控制理論及其網(wǎng)絡(luò)技術(shù)控制。Trio運動控制器提供了豐富的標(biāo)準(zhǔn)接口,例如RS232C、RS485、USB、Ethernet及CAN等,其中RS232C、RS485帶有HostLink、Modbus協(xié)議,可以和觸摸屏直接通訊;Trio運動控制編程語言是一種由Trio自行開發(fā)的結(jié)構(gòu)類似于BASIC的語言,其命令就是該運動名稱的英文單詞。例如:軸就是AXIS,相對移動就是MOVE,絕對運動就是MOVEABS等等。另外,TRIO還提供二次開發(fā)使用的ActiveX控件,用戶可以根據(jù)自身需要利用VB/VC/C++等高級語言進行二次開發(fā)。
(2)選用屏通觸摸屏,屏通觸摸屏采用高彩、高亮度的數(shù)字式液晶屏幕,顯示效果好、反應(yīng)快。觸摸屏與運動控制器之間通過RS485接口連接,觸摸屏可以進行參數(shù)的設(shè)置與顯示。機械手的狀態(tài)信息通過觸摸屏可以直觀的顯示出來,還可以通過觸摸屏上的按鈕、數(shù)字輸入等功能向系統(tǒng)發(fā)出指令,對機械手進行控制。
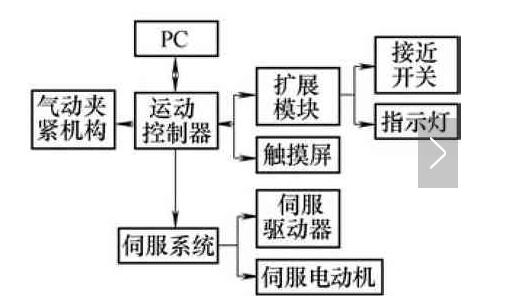
圖3 系統(tǒng)硬件設(shè)計圖
(3)伺服系統(tǒng)選用松下MINAS A5系列伺服系統(tǒng),包括伺服驅(qū)動器和伺服電動機,該伺服系統(tǒng)可以滿足高速、高精度和高性能的要求。伺服驅(qū)動器和伺服電動機之間通過配套的動力線和編碼器線進行連接。在機械手中需要水平和豎直兩套伺服系統(tǒng)。水平和豎直方向分別有兩個限位開關(guān),用來控制伺服電動機的行程。除此之外,在水平和豎直方向分別有一個回零開關(guān)作為基準(zhǔn),用來設(shè)置水平和豎直方向的零點。
4、數(shù)控系統(tǒng)軟件設(shè)計
系統(tǒng)軟件設(shè)計主要包括三大部分,分別為上位機程序設(shè)計、控制程序設(shè)計與觸摸屏程序設(shè)計。通過控制程序和觸摸屏程序的配合運行,可以實現(xiàn)機械手相應(yīng)的功能。
(1)軟件整體設(shè)計。為了保證軟件的可靠性與可擴展性,控制程序與觸摸屏程序采用模塊化設(shè)計思想。如圖4所示,軟件分為管理模塊、控制模塊和參數(shù)模塊三大部分。由于運動控制器自身沒有操作系統(tǒng),不具備開發(fā)環(huán)境,必須通過上位機對其進行開發(fā)與管理,所以管理模塊在上位機中運行;控制模塊在運動控制器中運行,在上位機上編寫好的控制程序可以直接傳輸?shù)竭\動控制器中,運動控制器根據(jù)程序?qū)崿F(xiàn)相應(yīng)的功能;參數(shù)模塊主要用來進行參數(shù)的設(shè)置與顯示,可在觸摸屏上運行。通過這樣的模塊化設(shè)計,可以提高系統(tǒng)的響應(yīng)速度,使系統(tǒng)更加穩(wěn)定可靠。
(2)部分程序設(shè)計。由于運動控制器是基于PC運行的,所以需要開發(fā)上位機程序?qū)?shù)控程序進行管理。一般運動控制器都會提供上位機開發(fā)的接口。Trio中的Active X控件就是用來與高級語言結(jié)合使用的接口,本文中使用VB進行上位機程序編寫,直接向工程中添加Active X控件,編程時調(diào)用相關(guān)函數(shù)即可。
控制程序分為兩部分,分別為手動控制程序和自動控制程序。在手動控制模式下,機械手主要根據(jù)觸摸屏上的按鈕指令進行運動,各個動作可以單步執(zhí)行,主要用來進行安裝調(diào)試與維修等工作;自動控制程序用來控制機械手自動完成工件的搬運工作,程序通過外部狀態(tài)信息的反饋,按照指定路線進行工件搬運,當(dāng)出現(xiàn)問題時系統(tǒng)會運行保護程序,防止意外發(fā)生,機械手的運行狀態(tài)和外部反饋信息都會在觸摸屏上實時顯示。機械手控制流程如圖5所示。
觸摸屏是人機交互的窗口,觸摸屏程序由多個畫面組成,通過這種方式來使人機交互更加清晰,避免誤操作的發(fā)生。觸摸屏界面主要有主界面、狀態(tài)顯示界面和操作界面等,其中狀態(tài)顯示界面如圖6所示。
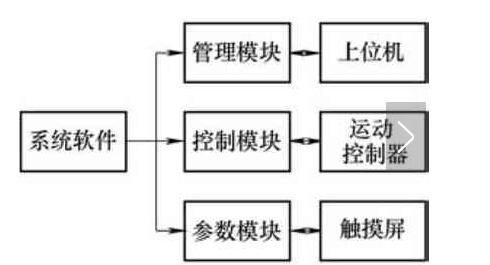
圖4 軟件整體設(shè)計圖
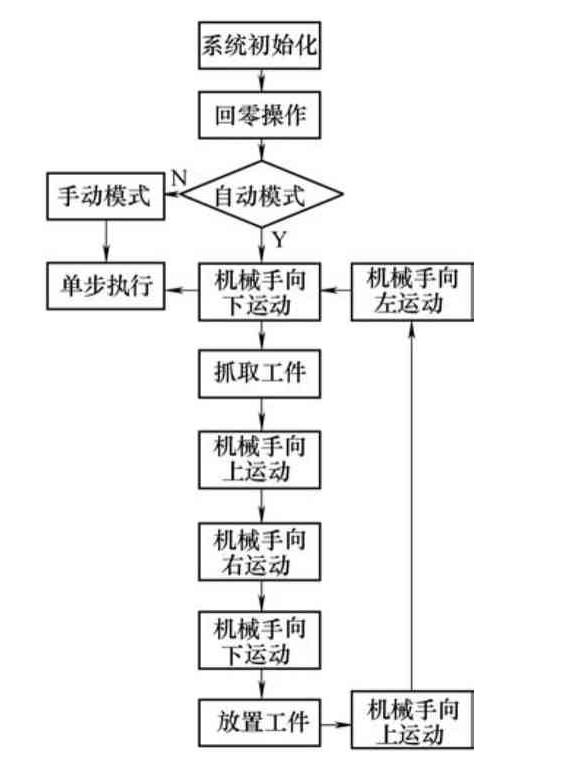
圖5 機械手控制流程圖
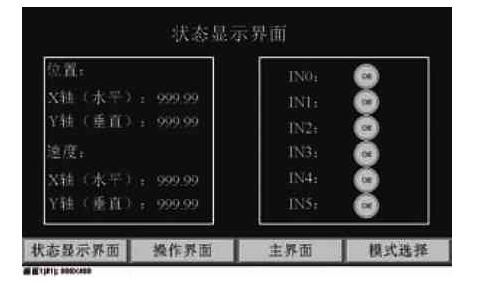
圖6 狀態(tài)顯示界面
5、結(jié)語
隨著工業(yè)控制的不斷發(fā)展,新的控制方式不斷出現(xiàn),相應(yīng)的數(shù)控系統(tǒng)也需要與時俱進。采用運動控制器作為數(shù)控系統(tǒng)的核心具有系統(tǒng)簡單靈活、硬件少且開放性好的優(yōu)點。實驗結(jié)果達到了預(yù)期設(shè)想,完成了相應(yīng)功能,證明了系統(tǒng)的可行性。基于運動控制器的數(shù)控系統(tǒng),既可以應(yīng)用于新數(shù)控系統(tǒng)的開發(fā),又可以應(yīng)用于傳統(tǒng)機床的數(shù)控化改造,是數(shù)控系統(tǒng)發(fā)展的新方向。






















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論