“ 總線關(guān)閉(bus off)是CAN節(jié)點(diǎn)比較重要的錯誤處理機(jī)制。那么,在總線關(guān)閉狀態(tài)下,CAN節(jié)點(diǎn)的恢復(fù)流程是怎樣的?又該如何理解節(jié)點(diǎn)恢復(fù)流程的“快恢復(fù)”和“慢恢復(fù)”機(jī)制?本文將為大家詳細(xì)分析總線
2020-08-04 11:16:00 13380
13380 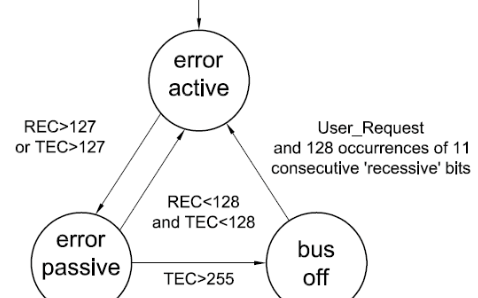
為了防止故障節(jié)點(diǎn)干擾甚至阻塞整個CAN網(wǎng)絡(luò)系統(tǒng),CAN協(xié)議實(shí)現(xiàn)了復(fù)雜的故障限制機(jī)制。為了保證通信的正常,CAN 2.0 總線協(xié)議總線中各節(jié)點(diǎn)需要采取以下措施進(jìn)行錯誤檢測。
2022-11-08 17:12:447486 錯誤幀是CAN總線用于進(jìn)行錯誤通知的報(bào)文,可以將任何一個節(jié)點(diǎn)發(fā)現(xiàn)的錯誤通知給其他節(jié)點(diǎn),包括發(fā)送節(jié)點(diǎn);進(jìn)而丟棄錯誤的報(bào)文,發(fā)送節(jié)點(diǎn)再進(jìn)行報(bào)文的重新發(fā)送,保證傳遞信息的準(zhǔn)確性。
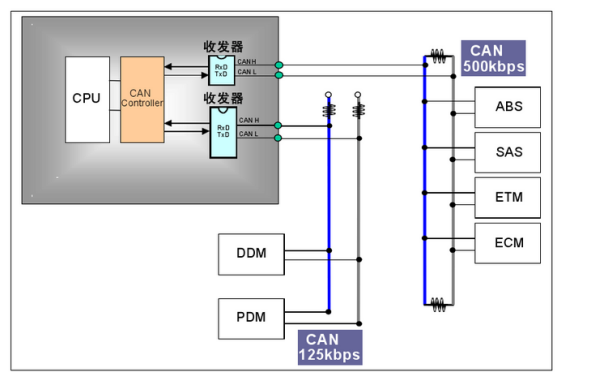
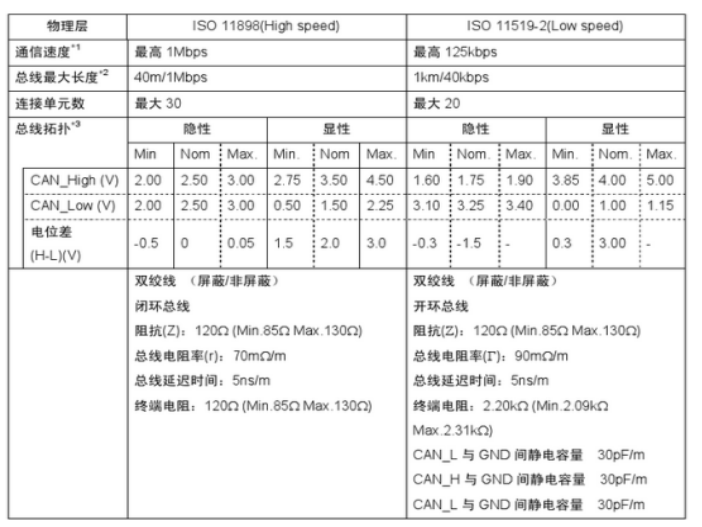
2023-02-24 09:27:31898 在ISO 11898-2和ISO 11898-3中分別規(guī)定了兩種CAN總線結(jié)構(gòu)(在BOSCH CAN2.0規(guī)范中,并沒有關(guān)于總線拓?fù)?/b>結(jié)構(gòu)的說明):高速CAN總線和低速CAN總線,區(qū)別表如下所示。
2023-04-07 09:30:181836 
我們知道,CAN總線上的每個節(jié)點(diǎn)往總線上發(fā)送數(shù)據(jù)的同時,會讀取總線上的數(shù)據(jù),并與自己發(fā)送的數(shù)據(jù)作對比。
2023-06-07 09:32:131274 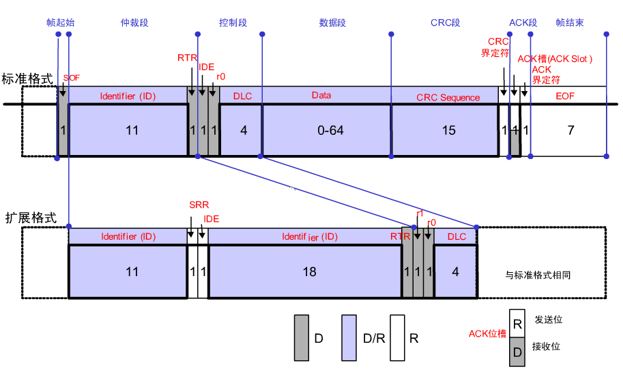
為了防止故障節(jié)點(diǎn)干擾甚至阻塞整個CAN網(wǎng)絡(luò)系統(tǒng),CAN協(xié)議實(shí)現(xiàn)了復(fù)雜的故障限制機(jī)制。為了保證通信的正常,CAN 2.0 總線協(xié)議總線中各節(jié)點(diǎn)需要采取以下措施進(jìn)行錯誤檢測:
2023-06-21 17:14:181840 
相信大家在嵌入式C開發(fā)中,或多或少都會遇到段錯誤(segmentation fault )。昨天分享了一個總線錯誤的例子:嵌入式軟件中,關(guān)于總線錯誤,我?guī)湍銈儾攘诉@些坑!相比總線錯誤,段錯誤是一種更為常見的錯誤。
2023-07-11 09:42:31128 
MCU內(nèi)置了CAN控制器用來將MCU的數(shù)據(jù)封裝為CAN幀格式,同時它也負(fù)責(zé)CAN幀的校驗(yàn)和錯誤幀的處理。控制器封裝好的邏輯報(bào)文經(jīng)TX RX送到CAN收發(fā)器,將邏輯信號轉(zhuǎn)變?yōu)檎嬲?b class="flag-6" style="color: red">總線差分波形。
2023-09-08 09:19:32672 ),或最大通信速率為1Mbps(設(shè)通信距離為40米)。 (13)CAN總線上的節(jié)點(diǎn)數(shù)可達(dá)110個。通信介質(zhì)可在雙絞線,同軸電纜,光纖中選擇。 (14)報(bào)文是短幀結(jié)構(gòu),短的傳送時間使其受干擾概率低
2014-04-27 15:16:02
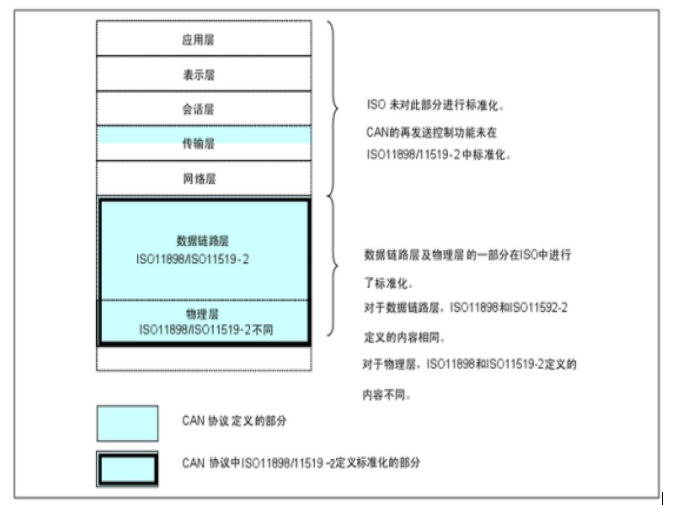
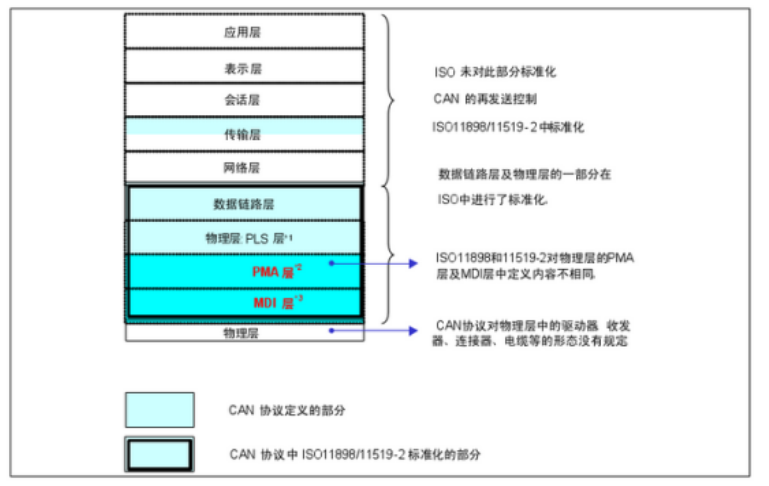
必須是相同的。? 傳輸層描述了 CAN 總線協(xié)議的內(nèi)核,它負(fù)責(zé)位時序(bit timing)、同步、仲裁、應(yīng)答、錯誤探測等。? 對象層負(fù)責(zé)報(bào)文的過濾、狀態(tài)和控制。? 應(yīng)用層完成用戶指定的數(shù)據(jù)傳輸任務(wù)。CAN 總線的物理層為數(shù)據(jù)通信提供了物理連接,而實(shí)際的數(shù)據(jù)通信在其他 3 層中完成。
2018-12-14 14:17:02
和接收錯誤計(jì)數(shù),計(jì)數(shù)達(dá)到一定的累計(jì)以后就會產(chǎn)生CAN BUS OFF, 這說明CAN總線上出現(xiàn)了嚴(yán)重的錯誤。如下圖CAN總線產(chǎn)生錯誤后的狀態(tài)轉(zhuǎn)換機(jī)制如果出現(xiàn)了BUS OFF,總線上的節(jié)點(diǎn)需要做一些動作
2022-01-14 06:55:10
我們先簡單總結(jié)一下CAN的錯誤處理與故障界定:1.CAN控制器記錄發(fā)生在發(fā)送/接收過程中,總線數(shù)據(jù)出現(xiàn)錯誤的總數(shù)(位錯誤,CRC錯誤等)。2.CAN控制器根據(jù)總線出錯數(shù)量由低到高,依次處于主動錯誤
2021-08-20 06:18:45
被設(shè)置,我的簡單C。ODE當(dāng)前捕獲這些錯誤并停止發(fā)送。我知道一旦TX錯誤計(jì)數(shù)器回到128以下,這些比特就會清除。我已經(jīng)閱讀了CAN文檔,盡管它們顯示了錯誤的結(jié)果,但是沒有關(guān)于如何從TX錯誤中恢復(fù)而不是
2020-03-11 10:00:20
),或最大通信速率為1Mbps(設(shè)通信距離為40米)。 (13)CAN總線上的節(jié)點(diǎn)數(shù)可達(dá)110個。通信介質(zhì)可在雙絞線,同軸電纜,光纖中選擇。 (14)報(bào)文是短幀結(jié)構(gòu),短的傳送時間使其受干擾概率低
2014-04-18 16:36:30
是兩種標(biāo)準(zhǔn)的差異對比圖。高速CAN物理層協(xié)議應(yīng)用最為廣泛,而低速CAN物理層協(xié)議一般應(yīng)用于可靠性要求較高的場合,這里不做詳細(xì)介紹。4. CAN總線顯性與隱性:CAN2.0規(guī)范定義了兩種互補(bǔ)的邏輯數(shù)值
2021-05-13 06:00:00
常有用。數(shù)據(jù)段長度最多為8個字節(jié),可滿足通常工業(yè)領(lǐng)域中控制命令、工作狀態(tài)及測試數(shù)據(jù)的一般要求。同時,8個字節(jié)不會占用總線時間過長,從而保證了通信的實(shí)時性。CAN協(xié)議采用CRC檢驗(yàn)并可提供相應(yīng)的錯誤處理功能,保證
2015-11-05 17:17:31
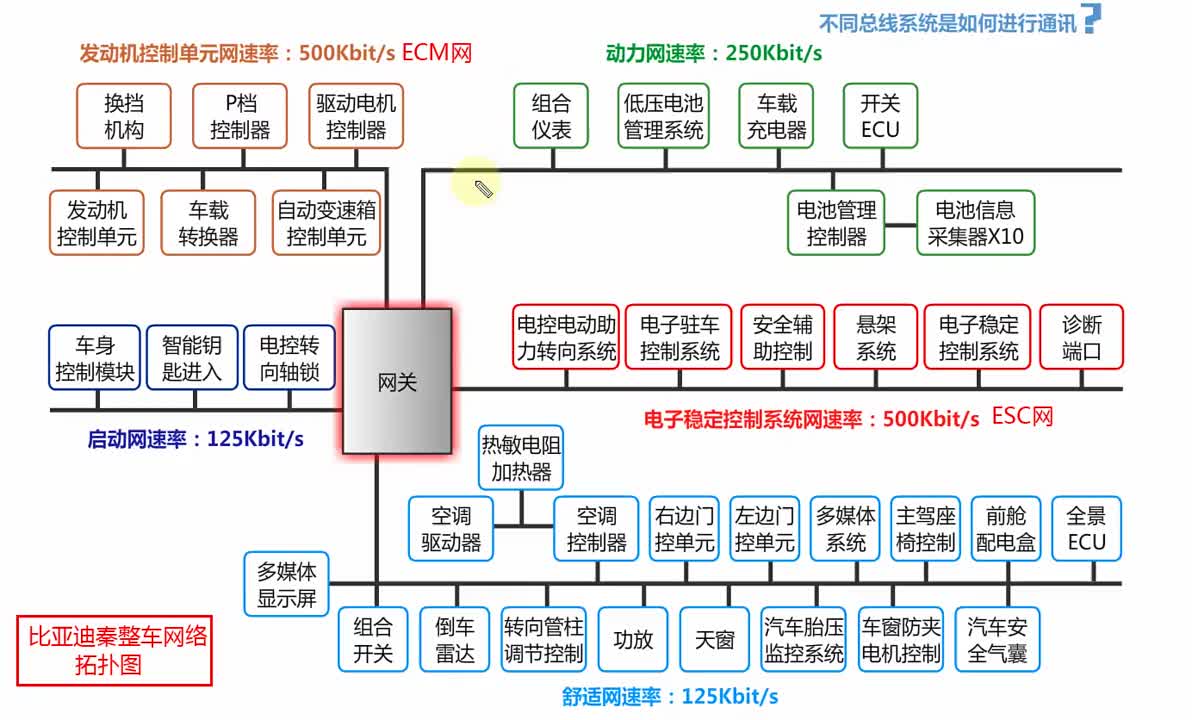
現(xiàn)場總線VS工業(yè)以太網(wǎng)現(xiàn)場總線CAN總線(Control Area Network)一、CAN總線是什么?CAN總線的作用?CAN總線的優(yōu)點(diǎn)CAN總線拓?fù)鋱D各接口協(xié)議速率對比
2021-08-06 07:44:19
標(biāo)志進(jìn)行標(biāo)定。當(dāng)任何節(jié)點(diǎn)檢測出位錯誤、填充錯誤、形式錯誤或應(yīng)答錯誤時,由該節(jié)點(diǎn)在下一位開始發(fā)送出錯誤標(biāo)志。在CAN總線中,任何一個單元可能處于下列3種故障狀態(tài)之一:錯誤激活狀態(tài)
2011-07-12 20:54:26
是當(dāng)總線的某一個節(jié)點(diǎn)檢測到錯誤后發(fā)送出來的,它會引起所有節(jié)點(diǎn)檢測到一個錯誤,所以當(dāng)有任何一個節(jié)點(diǎn)檢測到錯誤,總線上的其他節(jié)點(diǎn)也會發(fā)出錯誤幀。CAN總線設(shè)計(jì)了一套詳盡的錯誤計(jì)數(shù)機(jī)制來確保不會由于任何一個
2018-09-21 20:32:41
] &0x40為真,表明恢復(fù)到錯誤激活狀態(tài)。CAN通信協(xié)議出錯 #define CAN_ERR_PROT 0x00000008U 當(dāng)錯誤幀結(jié)構(gòu)體中CAN
2017-01-03 15:57:38
最近從LINUX中拆出來一個CAN驅(qū)動,結(jié)果是不斷總線錯誤(stuff error和Form error)下面說具體情況: 使用的是zynq7000,CAN1。與其對測的板子是335xs。已經(jīng)確認(rèn)
2016-05-26 21:33:28
錄1.Can總線電平介紹2.Can總線何時是空閑的3.Can總線的標(biāo)準(zhǔn)幀和擴(kuò)展幀結(jié)構(gòu)4Can總線幀類型4.1 數(shù)據(jù)幀4.2 遠(yuǎn)程幀4.3 錯誤幀(1)錯誤情景分下面幾類(2)錯誤幀類型4.4 過載幀5.Can總...
2021-08-23 08:44:20
新人項(xiàng)目上第一次用can總線。采用c8051f020+sja1000+PA80C250(有隔離電路),制PCB的時候沒有考慮周全。現(xiàn)在只能用軟件模擬時序 控制對SJA1000的讀寫。選用peil
2014-11-22 16:20:34
你了解CAN總線嗎?你知道總線中有哪些錯誤嗎?你想了解總線中的錯誤是如何校驗(yàn)以及錯誤之間的關(guān)系嗎?下文為大家揭開它神秘的面紗。數(shù)據(jù)校驗(yàn)是為保證數(shù)據(jù)的完整性進(jìn)行的一種驗(yàn)證操作。CAN通信采用CRC校驗(yàn)
2019-09-25 15:41:50
RX引腳的狀態(tài),這樣就不能完成恢復(fù)過程。為了完成恢復(fù)過程,bxCAN必須工作在正常模式。4 CAN錯誤狀態(tài)寄存器 (CAN_ESR)地址偏移量: 0x18復(fù)位值: 0x0000 0000圖3[tr
2018-03-20 13:48:46
`源模塊一直處于發(fā)送狀態(tài),這時開發(fā)板去接收報(bào)文會出現(xiàn)錯誤,如圖所示:左圖是用CAN盒持續(xù)發(fā)送報(bào)文,有圖是CAN接收結(jié)構(gòu)體的值,可以看出結(jié)構(gòu)體中的值除了ID正確,其他都錯誤。但是我先讓開發(fā)板進(jìn)入等待接收狀態(tài),再讓CAN盒發(fā)送報(bào)文,就完全正確。如圖:請問這是哪方面的問題呢?`
2018-06-14 15:31:59
使用STM8S208的CAN接口,需要在什么模式下訪問can的錯誤計(jì)數(shù)寄存器。我在正常模式下使用查詢方式讀取接收錯誤計(jì)數(shù)寄存器,返回值始終是0x02,求大俠指點(diǎn)。另外,can接口會偶爾出現(xiàn)接收超時
2014-03-26 17:31:34
最近在用CAN通信,看到錯誤管理和錯誤幀這一部分,不理解。手冊上說錯誤管理完全由硬件處理,是不是如果發(fā)生了錯誤,錯誤幀是由硬件自動發(fā)送的?那么錯誤幀的接收呢?也是由硬件自動接收處理的?還有stm32中的錯誤中斷,是只要監(jiān)測到總線上有錯誤就會觸發(fā)中斷嗎?還是說只有本機(jī)發(fā)送引起的錯誤才會觸發(fā)中斷呢?
2020-04-24 09:26:39
110個;報(bào)文標(biāo)識符可達(dá)2032種(CAN2.0A),而擴(kuò)展標(biāo)準(zhǔn)(CAN2.0B)的報(bào)文標(biāo)識符幾乎不受限制。5.CAN總線通信系統(tǒng)拓?fù)?/b>結(jié)構(gòu)CAN在物理結(jié)構(gòu)上屬于總線式通信網(wǎng)絡(luò)。系統(tǒng)的組成如下圖:該系
2016-11-06 17:00:51
進(jìn)行了說明,圖 1 描述了 CAN 協(xié)議中數(shù)據(jù)鏈路層和物理層與 OSI模型的關(guān)系。圖1 CAN分層結(jié)構(gòu)與OSI模型對比1.2 CAN-FD優(yōu)勢分析CAN-FD相比傳統(tǒng)CAN總線,其優(yōu)勢主要有以下3點(diǎn)。(1
2023-02-14 14:22:23
對多點(diǎn)及全局廣播等幾種方式傳送數(shù)據(jù),無需專門的調(diào)度。? CAN 總線的數(shù)據(jù)采用短幀結(jié)構(gòu),傳輸時間短,受干擾概率低,具有極好的檢錯效果。? CAN 總線采用 CRC 檢驗(yàn)并可提供相應(yīng)的錯誤處理功能,保證了
2018-12-13 14:26:31
做一個混合儲能系統(tǒng)。電路拓?fù)鋱D如下。右邊接的是驅(qū)動模塊。已經(jīng)有了。圖中的是能源模塊.
2018-04-24 09:23:17
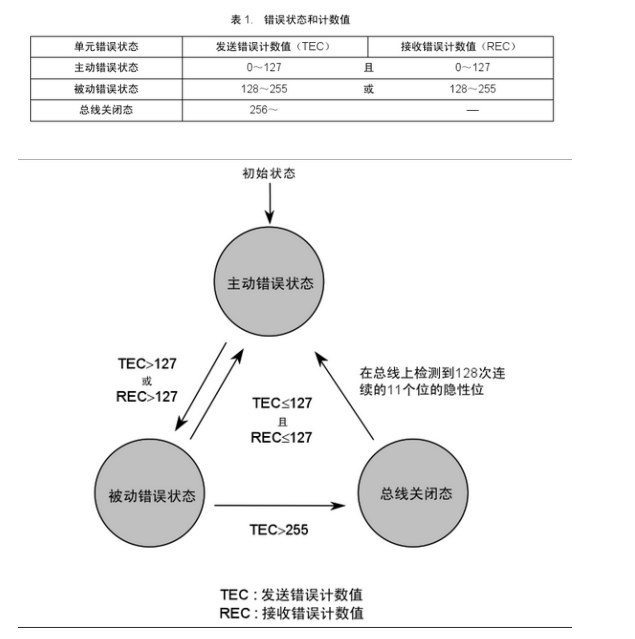
類: 錯誤激活、錯誤認(rèn)可、總線關(guān)閉。總線正常工作時處于錯誤激活狀態(tài),控制器檢測到錯誤后將發(fā)送/接收錯誤計(jì)數(shù)器的值遞增, 當(dāng)值大于127時進(jìn)入錯誤認(rèn)可, 大于255時總線關(guān)閉狀態(tài), CAN 總線錯誤檢測
2014-11-25 13:38:02
的CAN總線拓?fù)?/b>結(jié)構(gòu),如圖所示,所有的節(jié)點(diǎn)都連接到同一總線上,在總線的兩端分別需要一個120Ω的電阻。直線拓?fù)?/b>的優(yōu)點(diǎn):
2019-10-24 14:24:24
CAN總線相應(yīng)參數(shù)、控制收發(fā)的代碼。1.2 CAN控制器CAN控制器內(nèi)部結(jié)構(gòu)還是挺復(fù)雜的,一般現(xiàn)在CAN控制器都是與處理器集成在一起。其實(shí)對于編程的人來說,無非也就是包含一些控制、狀態(tài)、配置等寄存器
2018-10-10 09:53:40
求WSN實(shí)際應(yīng)用例子的拓?fù)鋱D,不管什么方面的應(yīng)用,都行。謝謝!
2016-04-03 21:27:23
時TEC數(shù)值增加,正確發(fā)送出數(shù)據(jù)幀時TEC數(shù)值減少。REC與TEC的數(shù)值會產(chǎn)生總線節(jié)點(diǎn)狀態(tài)的改變。*注:接收錯誤計(jì)數(shù)器(REC)- Receive Error Counter。*注:發(fā)送錯誤計(jì)數(shù)器(TEC
2015-07-09 13:54:46
在風(fēng)力發(fā)電儲能的場合中,大功率DC-DC的拓?fù)鋱D是怎么樣的,主要功率器件是用的什么?
2024-01-23 10:16:57
總線型拓?fù)?/b>結(jié)構(gòu)
這種網(wǎng)絡(luò)拓?fù)?/b>結(jié)構(gòu)比較簡單,總線型中所有設(shè)備都直接與采用一條稱為公共總線的傳輸介質(zhì)相連,這種介質(zhì)一般也是同軸電纜
2010-01-08 10:21:119887 向總線送出一位的某個節(jié)點(diǎn)同時也在監(jiān)視總線,當(dāng)監(jiān)視到總線位的電平與送出的電平不同時9則在該位時刻檢測到一個位錯誤。
2011-08-08 14:01:2011171 基于CAN總線系統(tǒng)結(jié)構(gòu)構(gòu)成,通過工程實(shí)踐的具體應(yīng)用以及對CAN控制器及收發(fā)器硬件結(jié)構(gòu)的深入理解,并從通信的角度出發(fā)著重深入分析了CAN總線通信的節(jié)點(diǎn)同步機(jī)制、總線地址機(jī)制、總
2012-05-08 15:23:04 404
404 CAN 狀態(tài)機(jī)包含:總線脫離、總線啟動、總線空閑、模式選擇、發(fā)送模式、接收模式、錯誤模式、間歇模式、超載模式及掛起模式等狀態(tài)。 CAN 狀態(tài)機(jī)的狀態(tài)編碼采用一種類似 One-Hot 的編碼方式
2016-03-22 16:03:0312 對于一般的CAN總線網(wǎng)絡(luò),其網(wǎng)絡(luò)結(jié)構(gòu)圖可以化簡圖、CAN總線網(wǎng)絡(luò)拓?fù)?/b>結(jié)構(gòu)圖。
2016-05-03 16:42:4548 基于FDTD的電磁波透地通信分層傳輸模型數(shù)值計(jì)算_蘇毅
2017-03-19 19:08:350 局部錯誤,全局通知是CAN總線錯誤類型中較為典型的一種,如何通過錯誤報(bào)文及波形快速定位錯誤原因呢?本文結(jié)合現(xiàn)場實(shí)測案例簡要分析。 一、CAN總線錯誤簡介 在CAN總線中存在5種錯誤類型,如圖1所示
2017-11-08 10:48:573 應(yīng)用最廣泛的現(xiàn)場總線之一。在建立之初,CAN總線就定位于汽車內(nèi)部的現(xiàn)場總線,具有傳輸速度快、可靠性高、靈活性強(qiáng)等優(yōu)點(diǎn)。上世紀(jì)90年代CAN總線開始在汽車電子行業(yè)內(nèi)逐步推廣,目前已成為汽車電子行業(yè)首選的通信協(xié)議,并且在醫(yī)療設(shè)備、工業(yè)生產(chǎn)、樓宇設(shè)施、交通運(yùn)輸?shù)阮I(lǐng)域中取得了廣泛
2017-11-09 20:22:4243735 
CAN-bus是實(shí)時性很強(qiáng)的總線,多主機(jī)廣播式結(jié)構(gòu),自動優(yōu)先級仲裁,具有傳輸錯誤自動重發(fā),自動CRC校驗(yàn)接收,錯誤率小于10-9的特點(diǎn)。
2017-12-26 15:14:0518 局部錯誤,全局通知是CAN總線錯誤類型中較為典型的一種,如何通過錯誤報(bào)文及波形快速定位錯誤原因呢?本文結(jié)合現(xiàn)場實(shí)測案例簡要分析。
2018-02-16 07:57:006974 
本文主要介紹了CAN總線遠(yuǎn)程幀和錯誤幀,首先我們先來了解了解一下通訊時使用的幀類型有哪些,他們的作用又是什么,具體的跟隨小編一起來了解一下吧。
2018-05-07 11:30:2125382 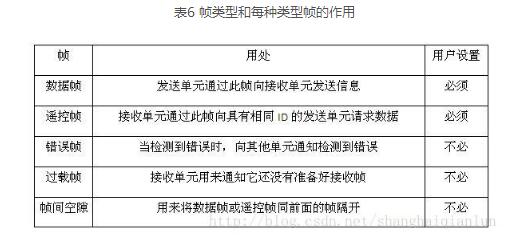
你了解CAN總線嗎?你知道總線中有哪些錯誤嗎?你想了解總線中的錯誤是如何校驗(yàn)以及錯誤之間的關(guān)系嗎?下文為大家揭開它神秘的面紗。
2018-06-26 10:29:2728435 
此CAN總線上有干擾,導(dǎo)致CAN控制器發(fā)生接收錯誤,CAN總線上的信號經(jīng)過收發(fā)器轉(zhuǎn)化為差分電平信號,此時信號容易受到外界干擾,這樣容易使CAN控制器發(fā)生接收錯誤。
2018-10-08 14:31:514590 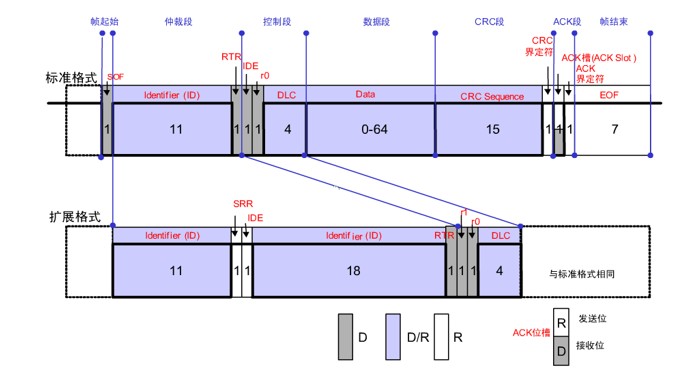
CAN總線邊沿時間會影響采樣正確性,而采樣錯誤會造成錯誤幀不斷出現(xiàn),影響CAN總線通信。
2018-11-23 14:04:277540 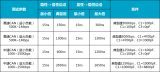
CAN總線用戶接口簡單,編程方便。網(wǎng)絡(luò)拓?fù)?/b>結(jié)構(gòu)采用總線式結(jié)構(gòu)。這種網(wǎng)絡(luò)結(jié)構(gòu)簡單、成本低,并且采用無源抽頭連接,系統(tǒng)可靠性高。通過CAN總線連接各個網(wǎng)絡(luò)節(jié)點(diǎn),形成多主機(jī)控制器局域網(wǎng)(CAN)。信息的傳輸采用CAN通信協(xié)議,通過CAN控制器來完成。
2018-11-28 17:16:0317438 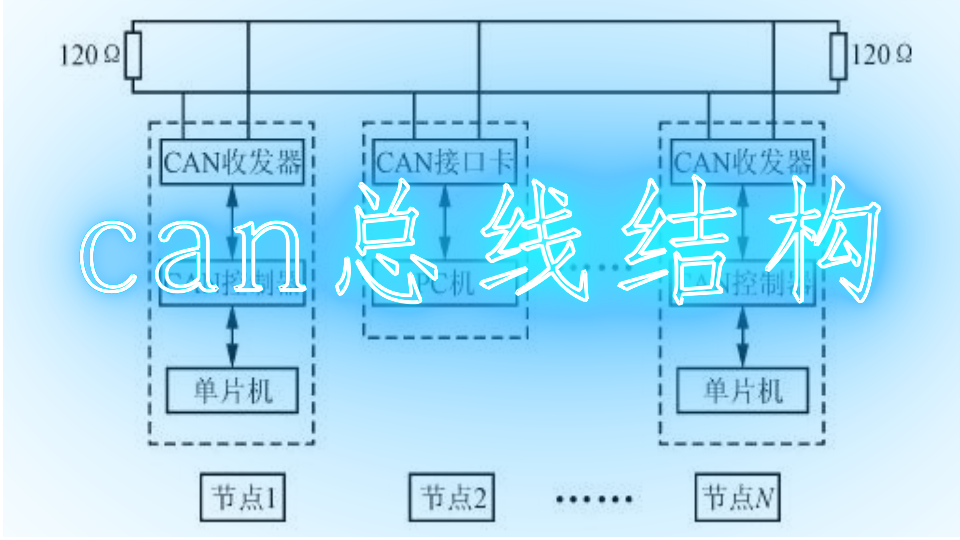
隨著CAN總線的應(yīng)用越來越廣泛,工程師在面對各種不同工況下,如何選擇合適的網(wǎng)絡(luò)拓?fù)?/b>方式就變成了一個讓人頭疼的問題。這里介紹主流的幾種總線拓?fù)?/b>方式,可以幫您完成快速了解進(jìn)行選擇。
2019-06-27 10:02:457888 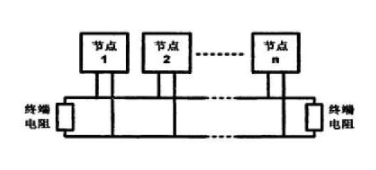
在CAN總線通信過程中CAN控制器具備完整的錯誤檢測能力,其中包含:位錯誤檢測、格式錯誤檢測、填充錯誤檢測、應(yīng)答錯誤檢測和CRC錯誤檢測。作為一種重要的錯誤檢測手段,CRC錯誤檢測是接收節(jié)點(diǎn)判斷CAN幀信息的完整性并向總線確認(rèn)應(yīng)答的依據(jù)。
2019-07-15 08:45:069290 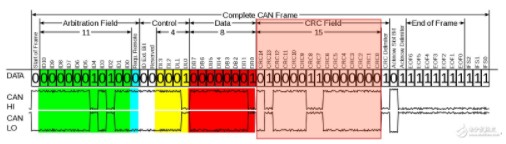
總線錯誤幀,為0,驅(qū)動不會上報(bào)錯誤幀。 幀格式 CAN幀結(jié)構(gòu)體定義如下,當(dāng)CAN_FRAME中CAN_ID的error為1時,表示該幀為錯誤幀。 typedefstruct{ unsignedintid
2020-02-05 10:27:241546 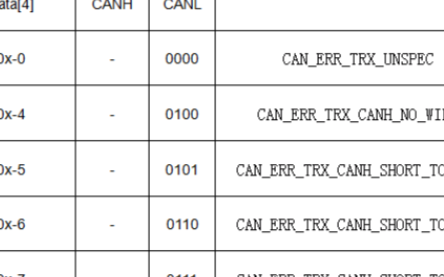
本文檔的主要內(nèi)容詳細(xì)介紹的是CAN總線基礎(chǔ)的詳細(xì)資料概述包括了:概述,汽車總線與CAN標(biāo)準(zhǔn),CAN的通信機(jī)制,數(shù)據(jù)幀,錯誤檢測與錯誤幀,CAN的幀格式,位定時與同步
2019-11-29 15:31:20105 為獲得安全的數(shù)據(jù)發(fā)送,CAN總線采取錯誤檢測和處理的措施,在報(bào)文傳輸過程中設(shè)有位錯誤、填充錯誤、CRC錯誤、格式錯誤和應(yīng)答錯誤5種錯誤類型,對于故障的界定有“錯誤激活”、“錯誤認(rèn)可”和“總線關(guān)閉”3種狀態(tài)。
2020-04-04 10:44:00969 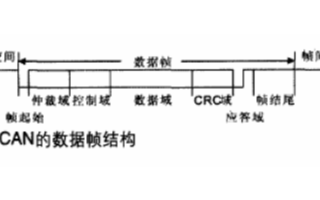
出面向汽車的CAN通信協(xié)議,后來,CAN總線通過ISO11898和ISO11595進(jìn)行了標(biāo)準(zhǔn)化,現(xiàn)在在歐洲是汽車網(wǎng)絡(luò)的標(biāo)準(zhǔn)協(xié)議。
2020-12-04 10:16:4528480 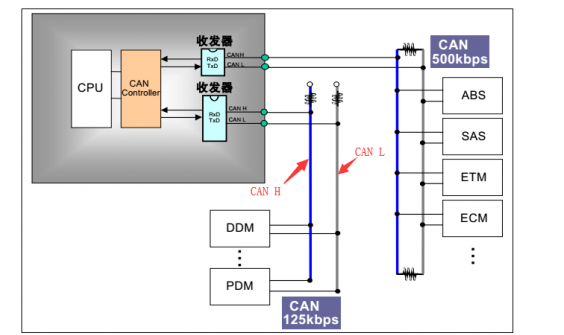
光伏電站監(jiān)控系統(tǒng)網(wǎng)絡(luò)拓?fù)鋱D(通信電源技術(shù)期刊不發(fā)了)-光伏電站監(jiān)控系統(tǒng)網(wǎng)絡(luò)拓?fù)鋱D? ? ? ? ? ? ? ? ??
2021-09-23 15:41:3646 CAN節(jié)點(diǎn)的穩(wěn)定性、可靠性和安全性得益于其強(qiáng)大的錯誤管理機(jī)制。那么,CAN節(jié)點(diǎn)為什么能感知錯誤?又是如何響應(yīng)錯誤?您是否能清晰地想象出這一過程?本文將為大家詳細(xì)分析CAN節(jié)點(diǎn)錯誤管理的工作
2021-10-20 09:49:232013 
【科普】CAN總線介紹及FPGA實(shí)現(xiàn)方案簡介 這里我們先逆推一下CAN總線的一些特點(diǎn)。 第一,CAN總線分層結(jié)構(gòu) 我們根據(jù)can總線具有的一些特性可知:CAN總線肯定具有分層結(jié)構(gòu),而且參考OSI模型
2021-11-18 16:35:555375 
STM32的CAN收發(fā)數(shù)據(jù)死在硬件錯誤中斷使用uCosIII的消息隊(duì)列,當(dāng)CAN接收到數(shù)據(jù),使用消息隊(duì)列給CAN數(shù)據(jù)處理任務(wù)發(fā)送一個消息CAN數(shù)據(jù)處理任務(wù)使用請求消息函數(shù)收到一個消息,進(jìn)行下一步操作
2021-12-09 09:36:0522 和接收錯誤計(jì)數(shù),計(jì)數(shù)達(dá)到一定的累計(jì)以后就會產(chǎn)生CAN BUS OFF, 這說明CAN總線上出現(xiàn)了嚴(yán)重的錯誤。如下圖CAN總線產(chǎn)生錯誤后的狀態(tài)轉(zhuǎn)換機(jī)制如果出現(xiàn)了BUS OFF,總線上的節(jié)點(diǎn)需要做一些動作
2022-01-14 13:21:2515 在本系列文章中,我們將為您詳細(xì)介紹CAN總線錯誤的相關(guān)知識,包括CAN總線錯誤的基礎(chǔ)概念、CAN總線錯誤的類型、CAN錯誤幀和CAN節(jié)點(diǎn)錯誤狀態(tài),并通過實(shí)際的應(yīng)用測試生成并記錄CAN錯誤。
2022-05-27 17:56:122636 在本系列文章中,我們將為您詳細(xì)介紹CAN總線錯誤的相關(guān)知識,包括CAN總線錯誤的基礎(chǔ)概念、CAN總線錯誤的類型、CAN錯誤幀和CAN節(jié)點(diǎn)錯誤狀態(tài),并通過實(shí)際的應(yīng)用測試生成并記錄CAN錯誤。
2022-06-13 16:08:347206 PCIe錯誤分為可校正的錯誤(Correctable Error)和不可校正的錯誤(Uncorrectable Error), Uncorrectable又分為致命的(Fatal)和非致命的(Nonfatal)。
2022-08-23 18:13:311016 錯誤幀用于在接收和發(fā)送消息時檢測出錯誤通知錯誤的幀,它由錯誤標(biāo)志和錯誤界定符構(gòu)成。
2022-08-24 18:20:042341 一般情況下,通訊網(wǎng)絡(luò)的拓?fù)?/b>結(jié)構(gòu)種類多,支線復(fù)雜繁瑣,而總線往往檢測矯正能力較強(qiáng),實(shí)施信號好,可靠性有保證,能夠有效地判斷錯誤節(jié)點(diǎn)和自動校正簡單錯誤,所以將通信網(wǎng)絡(luò)設(shè)計(jì)成總線型CAN網(wǎng)絡(luò)結(jié)構(gòu)可以滿足信息傳遞及時性和可靠性的要求。
2022-08-31 15:27:002901 錯誤狀態(tài)的種類有:主動錯誤狀態(tài),被動錯誤狀態(tài)和總線關(guān)閉態(tài)3種狀態(tài)。單元始終處于3種狀態(tài)之一。
2022-11-01 14:50:292326 CAN可以判斷出錯誤的類型是總線上暫時的數(shù)據(jù)錯誤還是持續(xù)的數(shù)據(jù)錯誤(如單元內(nèi)部故障、驅(qū)動器故障、斷線等),由此功能,當(dāng)總線上發(fā)生持續(xù)數(shù)據(jù)錯誤時,可將引起此故障的單元從總線上隔離出去。
2022-11-22 10:49:00768 在本文中將繼續(xù)為大家深入講解CAN總線的位填充機(jī)制、錯誤檢測和故障界定、網(wǎng)絡(luò)拓?fù)?/b>、終端匹配、電纜與接線、差分信號電壓幅值。
2023-02-09 11:05:201039 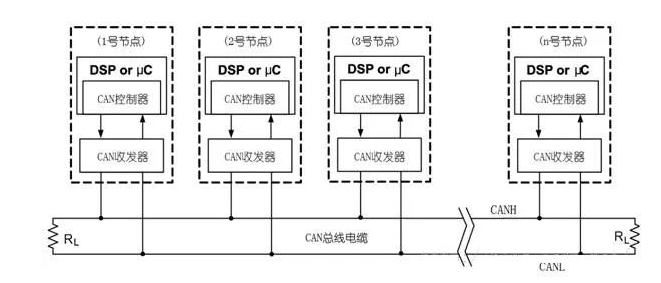
節(jié)點(diǎn)的硬件接口電路。基于對CAN 總線控制器的功能分析, 并應(yīng)用Verilog語言進(jìn)行軟件設(shè)計(jì), 從而實(shí)現(xiàn)CAN節(jié)點(diǎn)之間的通信功能。 0 引言 CAN 總線允許高達(dá)1M bit /s通訊速率, 支持多主通訊模式, 有高抗電磁干擾性而且能夠檢測出通信過程中產(chǎn)生的任何錯誤, 已被廣泛應(yīng)用到各自動
2023-06-18 11:15:011796 錯誤幀種類分為5種,分別是:位發(fā)送錯誤、ACK錯誤、位填充錯誤、CRC錯誤、格式錯誤。
2023-06-19 17:25:332455 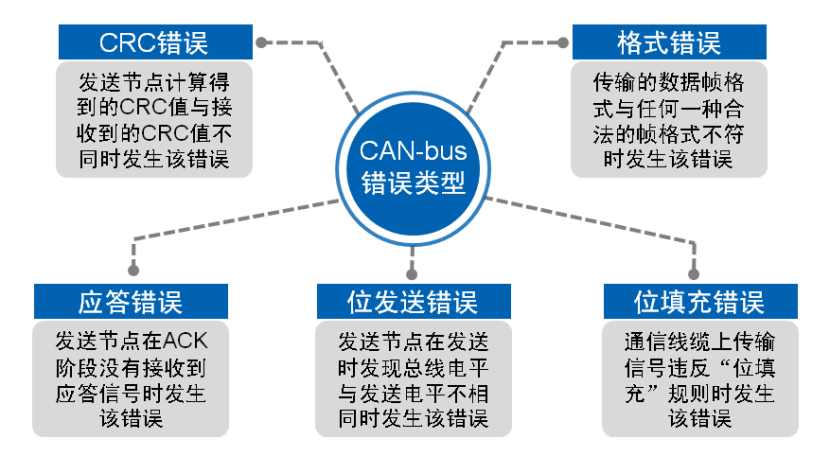
節(jié)點(diǎn)錯誤狀態(tài),并通過實(shí)際的應(yīng)用測試生成并記錄CAN錯誤。CAN總線錯誤類型CAN總線協(xié)議規(guī)定了5種CAN錯誤類型:位錯誤[發(fā)送器]位填充錯誤[接收器]格式錯誤[接收
2022-06-09 09:46:531176 
節(jié)點(diǎn)錯誤狀態(tài),并通過實(shí)際的應(yīng)用測試生成并記錄CAN錯誤。前文回顧虹科干貨|帶你全面認(rèn)識“CAN總線錯誤”(一)——CAN總線錯誤與錯誤幀虹科干貨|帶你全面認(rèn)識“CA
2022-06-09 09:46:031410 節(jié)點(diǎn)錯誤狀態(tài),并通過實(shí)際的應(yīng)用測試生成并記錄CAN錯誤。什么是CAN總線錯誤?控制器局域網(wǎng)絡(luò)(ControllerAreaNetwork,CAN)是當(dāng)今汽車和工業(yè)自
2022-05-27 10:39:213329 節(jié)點(diǎn)錯誤狀態(tài),并通過實(shí)際的應(yīng)用測試生成并記錄CAN錯誤。CAN總線錯誤類型CAN總線協(xié)議規(guī)定了5種CAN錯誤類型:位錯誤[發(fā)送器]位填充錯誤[接收器]格式錯誤[接收
2022-06-02 09:41:24813 AsimpleintrotoCANerrorsCAN總線錯誤介紹在本系列文章中,我們將為您詳細(xì)介紹CAN總線錯誤的相關(guān)知識,包括CAN總線錯誤的基礎(chǔ)概念、CAN總線錯誤的類型、CAN錯誤幀和CAN
2022-06-09 10:21:001083 錯誤幀的基礎(chǔ)知識錯誤幀的作用錯誤幀是CAN總線用于進(jìn)行錯誤通知的報(bào)文,可以將任何一個節(jié)點(diǎn)發(fā)現(xiàn)的錯誤通知給其他節(jié)點(diǎn),包括發(fā)送節(jié)點(diǎn);進(jìn)而丟棄錯誤的報(bào)文,發(fā)送節(jié)點(diǎn)再進(jìn)行報(bào)
2023-02-23 15:11:521671 
:CAN2.0A和CAN2.0B。CAN2.0A支持11位標(biāo)準(zhǔn)標(biāo)識符,而CAN2.0B支持29位擴(kuò)展標(biāo)識符。CAN總線拓?fù)?/b>結(jié)構(gòu)分為總線型、星型和混合型。總線型結(jié)構(gòu)最為普遍,它連
2023-04-21 09:42:31639 
CAN總線狀態(tài)直接進(jìn)入了BUS OFF狀態(tài),這意味著錯誤計(jì)數(shù)已經(jīng)超限,查看CPU收發(fā)寄存器的收發(fā)錯誤計(jì)數(shù)顯示發(fā)送錯誤計(jì)數(shù)TEC達(dá)到248, 接收錯誤計(jì)數(shù)為0。這很明顯,數(shù)據(jù)壓根沒有發(fā)送到總線上。
2023-08-01 14:37:003127 
認(rèn)識CAN 總線錯誤的第一步就是了解認(rèn)識CAN 總線協(xié)議和它的具體功能,這樣才能更容易地理解CAN 總線是如何去發(fā)現(xiàn)并解決錯誤的。
2023-08-14 15:18:463228 
STM32 CAN接收/發(fā)送錯誤寄存器如何清零?? CAN總線是一種常用的串行總線,其具有高可靠性、高速率、容錯能力強(qiáng)等特點(diǎn),廣泛應(yīng)用于汽車電子、制造業(yè)自動化、工程控制等領(lǐng)域。在CAN總線的標(biāo)準(zhǔn)
2023-09-14 14:22:312419 1、CAN總線的常見故障 CAN總線錯誤分析與解決 當(dāng)CAN總線出現(xiàn)故障或數(shù)據(jù)傳輸異常時,往往會出現(xiàn)多種奇怪的故障現(xiàn)象,如儀表板顯示異常,車輛無法啟動,啟動后無法熄滅,車輛動力性能下降,某些電控系統(tǒng)
2023-09-14 16:30:071595 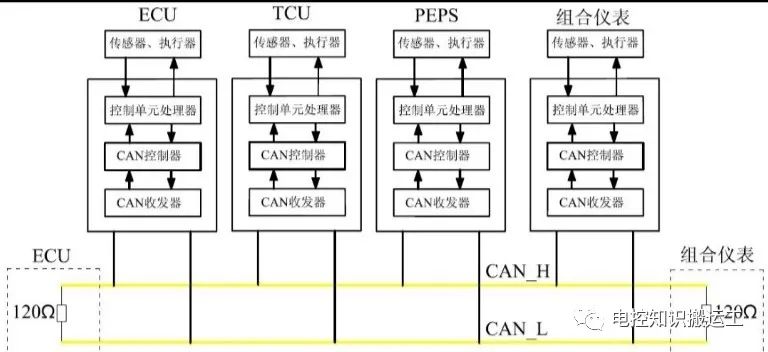
工程項(xiàng)目中,大家可能會注意到:不管哪家主機(jī)廠的網(wǎng)絡(luò)拓?fù)?/b>,CAN總線是不可或缺的一種總線。所以,了解CAN總線似乎是一名汽車工程師的基礎(chǔ)課,很多時候,我們可能覺得自己很懂,而實(shí)際呢?個人觀點(diǎn),最好
2023-10-01 10:16:00440 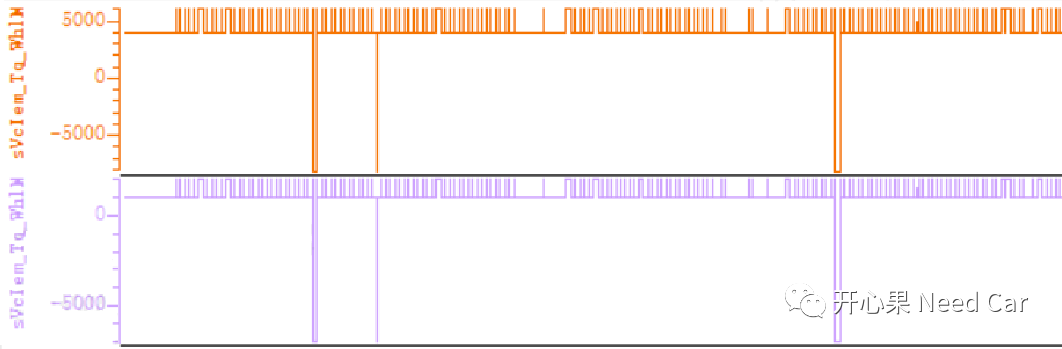
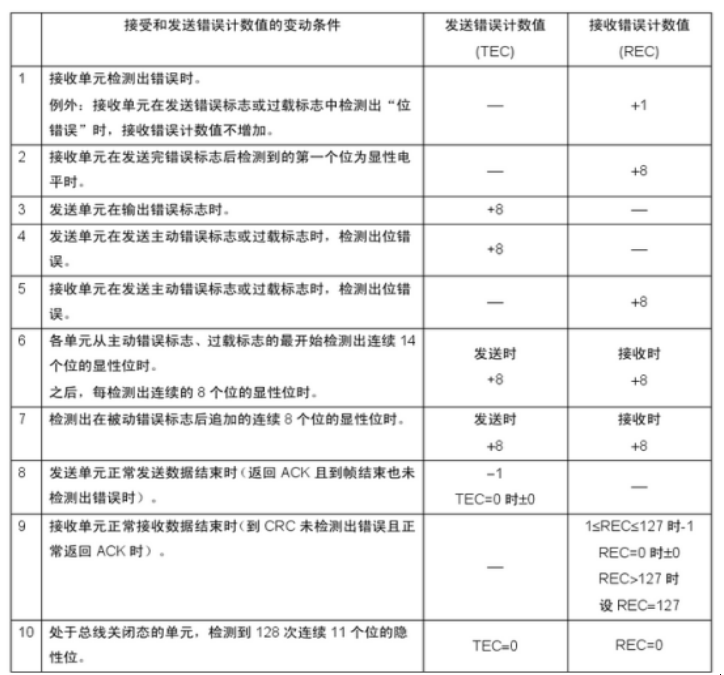
每個節(jié)點(diǎn)維護(hù)兩個錯誤計(jì)數(shù)器:傳送錯誤計(jì)數(shù)器和接收錯誤計(jì)數(shù)器。有幾個規(guī)則規(guī)定這些計(jì)數(shù)器怎樣增加和/或減少計(jì)數(shù)。總的來講,檢測到故障的傳送器增加其傳送錯誤計(jì)數(shù)器比偵聽節(jié)點(diǎn)增加其接收錯誤計(jì)數(shù)器要快。
2023-09-20 17:09:03845 
RS232通信時怎么處理錯誤?RS232通信中的錯誤處理方法? RS232通信是一種電氣標(biāo)準(zhǔn),它定義了計(jì)算機(jī)和串行通信設(shè)備之間的通信協(xié)議。盡管RS232通信很穩(wěn)定,但仍然可能會出現(xiàn)錯誤。因此,處理
2023-10-17 16:33:251631 如 CAN 協(xié)議所述,錯誤管理完全由硬件通過發(fā)送錯誤計(jì)數(shù)器( CAN_ESR 寄存器中的 TEC 值)和接收錯誤計(jì)數(shù)器( CAN_ESR 寄存器中的 REC 值)來處理,這兩個計(jì)數(shù)器根據(jù)錯誤 狀況進(jìn)行遞增或遞減。
2023-10-20 15:27:39449 
電子發(fā)燒友網(wǎng)站提供《電力通信網(wǎng)中光通信的連接方式與光通信網(wǎng)的整體結(jié)構(gòu)拓?fù)鋱D.pdf》資料免費(fèi)下載
2023-10-24 09:07:280 如何用示波器排查CAN的各種錯誤幀呢? 導(dǎo)言: 控制器局域網(wǎng)絡(luò)(Controller Area Network,CAN)是一種常用的現(xiàn)場總線通信協(xié)議,廣泛應(yīng)用于汽車電子系統(tǒng)、工業(yè)自動化等領(lǐng)域。然而
2023-12-07 11:09:01508 高速CAN總線和低速CAN總線的特性 高速CAN總線和低速CAN總線是兩種常見的CAN總線類型。它們在數(shù)據(jù)傳輸速率、最大電纜長度、適用場景等方面存在一些差異。下面將詳盡、詳實(shí)、細(xì)致地介紹這兩種CAN
2024-01-31 14:09:01497
 電子發(fā)燒友App
電子發(fā)燒友App











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論