上圖中的人和椰子樹,人在前,椰子樹在后,最下方是雙目相機(jī)中的成像。其中,右側(cè)相機(jī)成像中人在樹的左側(cè),左側(cè)相機(jī)成像中人在樹的右側(cè),這是因?yàn)?b class="flag-6" style="color: red">雙目的角度不一樣。
2022-09-26 09:37:44 6538
6538 其使用的算法復(fù)雜。被動(dòng)測(cè)距按照使用的視覺傳感器數(shù)量可分為單目視覺、雙目立體視覺和多目視覺三大類。 (1)單目視覺 單目視覺是指僅利用一臺(tái)照相機(jī)拍攝一張相片來(lái)進(jìn)行測(cè)量。因僅需要一臺(tái)相機(jī),所以該方法
2020-12-01 15:08:04
雙目測(cè)寬儀是基于機(jī)器視覺原理及模擬人的雙眼進(jìn)行寬度尺寸自動(dòng)測(cè)量的儀器,是一種高度自動(dòng)化的工業(yè)實(shí)時(shí)在線寬度檢測(cè)儀表。
雙目測(cè)寬儀是一種智能化的全自動(dòng)工業(yè)在線實(shí)時(shí)寬度檢測(cè)設(shè)備,兩個(gè)工業(yè)相機(jī)就像人的雙眼
2023-12-04 17:10:35
實(shí)用化,不僅將成為工業(yè)檢測(cè)、生物醫(yī)學(xué)、虛擬現(xiàn)實(shí)等領(lǐng)域的關(guān)鍵技術(shù),還有可能應(yīng)用于航天遙測(cè)、軍事偵察等領(lǐng)域。目前在國(guó)外,雙目體視技術(shù)已廣泛應(yīng)用于生產(chǎn)、生 活中。雙目立體視覺是計(jì)算機(jī)視覺的一個(gè)重要分支,單從
2013-11-21 16:20:51
將成為工業(yè)檢測(cè)、生物醫(yī)學(xué)、虛擬現(xiàn)實(shí)等領(lǐng)域的關(guān)鍵技術(shù),還有可能應(yīng)用于航天遙測(cè)、軍事偵察等領(lǐng)域。目前在國(guó)外,雙目體視技術(shù)已廣泛應(yīng)用于生產(chǎn)、生 活中。雙目立體視覺是計(jì)算機(jī)視覺的一個(gè)重要分支,單從雙目
2013-11-21 16:22:03
雙目立體視覺(BinocularStereoVision)是機(jī)器視覺的一種重要形式,因其可簡(jiǎn)單地利用左右攝像機(jī)中的圖像信息計(jì)算得到相機(jī)視野中物體相對(duì)于攝像機(jī)的深度信息使得該技術(shù)擁有廣泛的應(yīng)用前景
2021-12-23 07:19:52
高速相機(jī)對(duì)目標(biāo)位進(jìn)行攝像,充當(dāng)人的雙眼的功能,然后通過系統(tǒng)軟件處理,可以確定任意物體的三維輪廓,還可以得到輪廓上任意點(diǎn)的三維坐標(biāo)。基于雙目立體視覺這種強(qiáng)大的技術(shù)功能,不但在軍事科研上有所運(yùn)用,如航天遙測(cè)
2016-03-03 09:36:59
對(duì)液體、固體的穿透本領(lǐng)很大,尤其是在陽(yáng)光不透明的固體中,它可穿透幾十米的深度。超聲波碰到雜質(zhì)或分界面會(huì)產(chǎn)生顯著反射形成反射成回波,碰到活動(dòng)物體能產(chǎn)生多普勒效應(yīng)。因此超聲波檢測(cè)廣泛應(yīng)用在工業(yè)、國(guó)防
2018-11-12 16:16:45
9 Applications of Deep Anomaly Detection 深度異常檢測(cè)的應(yīng)用9.1 Intrusion Detection9.2 Fraud Detection9.3
2021-07-12 09:18:14
相機(jī)包帶加厚肩帶 攝影包相機(jī)包電腦包減壓彈力單肩帶 背帶金屬扣
2023-03-28 13:03:52
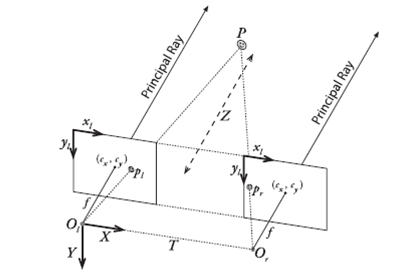
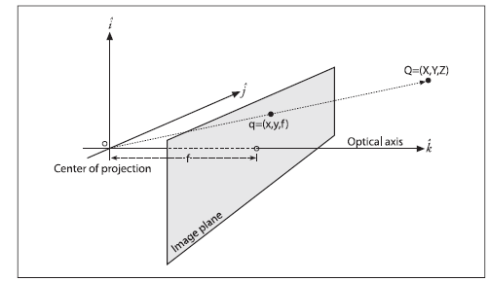
://mp.weixin.qq.com/s/kcecV6PNE92FB8ugSoV4tw雙目立體視覺系統(tǒng)使用兩只相機(jī)同步采集圖像,通過像素匹配獲得深度圖像,進(jìn)而獲取三維點(diǎn)云,系統(tǒng)結(jié)構(gòu)如下。用下圖來(lái)解釋雙目視覺的基本原理:圖中所示變量為
2020-03-02 17:03:12
挑戰(zhàn),包括激光雷達(dá)、單目測(cè)距和雙目視覺技術(shù)等。在當(dāng)前的高級(jí)輔助駕駛技術(shù)(ADAS)中,雙目視覺技術(shù)在距離檢測(cè)方面表現(xiàn)出色,它可以精確地測(cè)量物體的距離,提供更客觀的數(shù)據(jù)。
為了應(yīng)對(duì)這一需求,設(shè)計(jì)了一種
2023-12-19 18:02:07
電腦接了個(gè)CREVIS的USB相機(jī),在計(jì)算機(jī)的圖像設(shè)備里能檢測(cè)到,驅(qū)動(dòng)也裝好了,但是NIMAX的設(shè)備和接口里只有電腦自帶的攝像頭,缺測(cè)不到外接的相機(jī)。這是什么問題?
2017-06-08 22:57:30
看電賽論文中,總結(jié)到只要用到避障,基本上都用到ST178或ST188,可是當(dāng)我們查看器件手冊(cè)時(shí),發(fā)現(xiàn)他的檢測(cè)距離只有十幾毫米,這在現(xiàn)實(shí)中如何用呀!在網(wǎng)上查了一些資料,沒有看到可提高檢測(cè)距離的資料,壇子上也搜了,沒有找到,有經(jīng)驗(yàn)的前輩希望指點(diǎn),謝謝
2014-04-29 08:43:42
深度相機(jī)根據(jù)其工作原理可以分為哪幾種?其有哪些區(qū)別?
2021-07-01 10:03:56
目前我們想做一個(gè)產(chǎn)品,把USB的相機(jī)(相機(jī)需求單獨(dú)驅(qū)動(dòng))的數(shù)據(jù)在相機(jī)模塊端轉(zhuǎn)成以太網(wǎng)數(shù)據(jù),通過以太網(wǎng)cable連接到電腦上,有幾個(gè)問題想請(qǐng)教:用哪顆芯片軟件端是否有成熟方案是否支持Win,Linux,嵌入式等多平臺(tái)速率多少?USB2.0還是能到3.0小白問題,先感謝大牛回答!
2022-09-29 08:16:09
`labview在檢測(cè)PCBA插件的錯(cuò)、漏、反等缺陷中的應(yīng)用檢測(cè)原理通過高精度彩色工業(yè)相機(jī)不停板實(shí)時(shí)抓取板卡圖像,采取卷積神經(jīng)網(wǎng)絡(luò)算法處理圖像,智能判定元器件不良。采用最新的深度學(xué)習(xí)算法對(duì)電容,光耦,二極管等訓(xùn)練模型,能兼容不同pcb板,不同環(huán)境。`
2021-07-13 15:27:47
掃地機(jī)器人這樣服務(wù)機(jī)器人是不可能使用的。另外也有其他的方案,比如雙目景深相機(jī),TOF景深相機(jī),結(jié)構(gòu)光景深相機(jī),這幾種景深相機(jī)有相同的地方也有不同的地方,其中雙目景深相機(jī)的硬件結(jié)構(gòu)最簡(jiǎn)單,只需要兩個(gè)cmos
2017-11-12 21:37:42
內(nèi)核, 主頻可達(dá)1GHz, 可大大提高視覺處理的效率項(xiàng)目描述:該項(xiàng)目是五子棋機(jī)器人研發(fā)的一部分, 通過雙目攝像頭檢測(cè)出五子棋的位置, 測(cè)算出其全場(chǎng)坐標(biāo), 然后移動(dòng)過去抓取棋子
2015-08-09 07:48:55
是左右相機(jī)拍攝同一塊圓形標(biāo)定板的圖像,并根據(jù)labview自帶的圓點(diǎn)標(biāo)定板圓點(diǎn)檢測(cè)函數(shù)得到圓點(diǎn)坐標(biāo)。下圖是加載圓點(diǎn)標(biāo)定板標(biāo)定結(jié)果后,加載一對(duì)圖像后,鼠標(biāo)移動(dòng)到左圖上顯示的距離信息。程序框圖分3部分
2021-09-27 16:52:18
用,那因?yàn)閮蓚€(gè)平面平行是否可以根據(jù)相似三角形 來(lái)求解,只是因?yàn)榫嚯x的改變而比例改變,這時(shí)就需要檢測(cè)距離3,LabVIEW2014里面有一個(gè)set simple calibration VI,需要輸入像素
2016-05-20 15:49:27
ABSTRACT1.基于深度學(xué)習(xí)的異常檢測(cè)的研究方法進(jìn)行結(jié)構(gòu)化和全面的概述2.回顧這些方法在各個(gè)領(lǐng)域這個(gè)中的應(yīng)用情況,并評(píng)估他們的有效性。3.根據(jù)基本假設(shè)和采用的方法將最先進(jìn)的深度異常檢測(cè)技術(shù)分為
2021-07-12 06:36:22
異常檢測(cè)的深度學(xué)習(xí)研究綜述原文:arXiv:1901.03407摘要異常檢測(cè)是一個(gè)重要的問題,在不同的研究領(lǐng)域和應(yīng)用領(lǐng)域都得到了很好的研究。本文的研究目的有兩個(gè):首先,我們對(duì)基于深度學(xué)習(xí)的異常檢測(cè)
2021-07-12 07:10:19
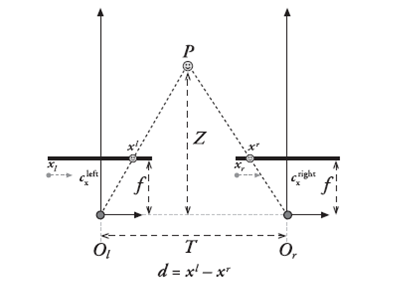
識(shí)別和測(cè)距,完成FCW(前方碰撞預(yù)警)等ADAS功能。雙目視覺測(cè)距的基本原理并不復(fù)雜,如圖2所示,P為目標(biāo)點(diǎn),它在左右兩個(gè)相機(jī)(鏡頭中心分別為A和B)上的成像點(diǎn)分別為E和F,則P點(diǎn)在兩個(gè)相機(jī)中的視差為d
2017-08-12 15:15:52
嗨,我買了一臺(tái)D435相機(jī)。我想要校準(zhǔn)D435相機(jī)與其他設(shè)備的相對(duì)位置,所以我需要測(cè)量D435的RGB相機(jī)和深度相機(jī)之間的相對(duì)位置以便進(jìn)一步完成工作。所以我想問這是否確實(shí)得到了一個(gè)確切的參數(shù)或方法
2018-11-27 14:16:59
寬厚板材在線測(cè)寬,可采用雙目測(cè)寬儀,如果采用平行光檢測(cè)法,有可能會(huì)因?yàn)閮A斜導(dǎo)致測(cè)量不準(zhǔn),因此采用雙目測(cè)寬儀進(jìn)行寬度尺寸的檢測(cè)。
雙目測(cè)寬儀測(cè)量原理
在利用相機(jī)測(cè)量寬度時(shí),由于單個(gè)相機(jī)在成像時(shí)存在“近
2023-11-20 17:25:38
雙目測(cè)寬儀是機(jī)器視覺原來(lái)制造而成的智能寬度檢測(cè)設(shè)備,廣泛應(yīng)用于板材類產(chǎn)品的寬度檢測(cè)。通過測(cè)寬儀的使用,實(shí)時(shí)了解產(chǎn)品寬度品質(zhì),進(jìn)行超差提示,減少?gòu)U品的生產(chǎn)。
雙目測(cè)寬儀優(yōu)勢(shì)
測(cè)量軟件界面顯示:產(chǎn)品規(guī)格
2023-11-28 17:13:06
都會(huì)有所要求。但是,靈敏度越高,噪聲的影響就會(huì)越大,因此,在選擇高靈敏度相機(jī)時(shí),還需要了解相機(jī)是否具有較高的信噪比;6、檢測(cè)需求。例如:檢測(cè)環(huán)境、檢測(cè)距離、檢測(cè)目標(biāo)物的運(yùn)動(dòng)狀態(tài)、檢測(cè)工具的體積要求等
2014-03-26 15:25:46
中,應(yīng)用雙目立體視覺來(lái)進(jìn)行的熱點(diǎn)方向很多,采用維視圖像專門針對(duì)雙目立體視覺優(yōu)化定制的系列雙目工業(yè)相機(jī)研發(fā)的立體視覺系統(tǒng)應(yīng)用實(shí)例有以下四大方面:1、農(nóng)業(yè)方面:牛羊等活體動(dòng)物體尺測(cè)量,植物生長(zhǎng)過程三維監(jiān)控
2016-01-19 16:59:12
D130S型3D相機(jī)采用主動(dòng)式深度感知技術(shù),它采用激光光源和MEMS微振鏡模組作為投影模組,將可編碼的條形結(jié)構(gòu)光投射于物體之上,并由成像設(shè)備采集并傳輸給計(jì)算單元,生成點(diǎn)云圖像。即其原理為通過在成像
2022-01-29 13:40:52
D130型3D相機(jī)采用自主研發(fā)的MEMS結(jié)構(gòu)光技術(shù),結(jié)合紅外激光光束實(shí)現(xiàn)光柵動(dòng)態(tài)結(jié)構(gòu)光投射,通過高速CMOS拍攝條紋畸變,采用三角測(cè)距原理實(shí)現(xiàn)高精度三維信息采集。該型號(hào)3D相機(jī)在
2022-03-21 16:16:04
D132型3D相機(jī)采用自主研發(fā)的MEMS結(jié)構(gòu)光技術(shù),結(jié)合紅外激光光束實(shí)現(xiàn)光柵動(dòng)態(tài)結(jié)構(gòu)光投射,通過高速CMOS拍攝條紋畸變,采用三角測(cè)距原理實(shí)現(xiàn)高精度三維信息采集。該型號(hào)3D相機(jī)在
2022-06-15 14:44:13
介介紹:D300型深度相機(jī)采用主動(dòng)式深度感知技術(shù),它以DLP投影儀作為結(jié)構(gòu)光投射器,將可編碼的條紋結(jié)構(gòu)光投射于物體之上,并由成像單元采集并傳輸給計(jì)算單元,生成點(diǎn)云數(shù)據(jù)。產(chǎn)品特征:? 藍(lán)光LED光源
2022-12-14 11:27:02
本文詳細(xì)介紹了ADS7852的工作原理及其應(yīng)用,并給出了它與89C51及TCD2901D的連接電路圖。說(shuō)明了雙目測(cè)距的原理并給出了測(cè)距的求解公式。利用ADS7852的特點(diǎn)解決了雙目測(cè)距中激光光斑
2010-08-03 17:02:40 40
40
超聲測(cè)距系統(tǒng)的回波信號(hào)檢測(cè)電路
2009-04-22 19:33:13881 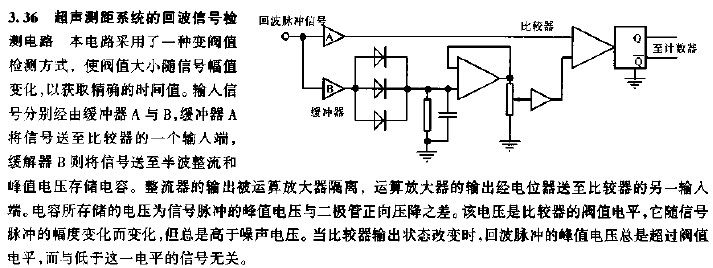
筆者設(shè)計(jì)了一種基于AVR單片機(jī)的激光測(cè)距機(jī)綜合性能檢測(cè)設(shè)備,借助該設(shè)備,對(duì)不同型號(hào)的激光測(cè)距機(jī)完成測(cè)距精度
2010-10-08 17:14:541675 
激光測(cè)距能力檢測(cè)方法
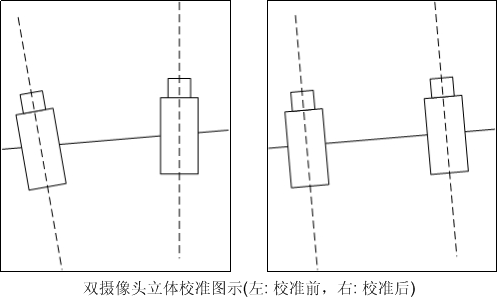
2011-01-07 17:03:3748 雙目視覺是利用機(jī)器視覺進(jìn)行障礙物檢測(cè)的研究熱點(diǎn)。針對(duì)雙目視頻不同步,導(dǎo)致立體匹配不精準(zhǔn)的問題,提出了一種基于圖像處理的雙目校準(zhǔn)算法。算法首先根據(jù)道路的先驗(yàn)特征模型,建立視覺校準(zhǔn)的敏感區(qū)域,以減小
2015-12-18 16:26:5734 Xilinx FPGA工程例子源碼:基于FPGA實(shí)時(shí)處理的雙目測(cè)距系統(tǒng)
2016-06-07 15:07:4537 電子開發(fā)機(jī)器人相關(guān)教程資料——全自主機(jī)器人雙目視覺運(yùn)動(dòng)檢測(cè)
2016-09-06 16:42:430 今天,小蟻正式發(fā)布了旗下的雙目VR全景相機(jī),這是目前能買到的最便宜的高像素全新相機(jī)之一。
2017-06-05 20:44:433510 激光測(cè)距機(jī)模擬信號(hào)處理器不能利用多個(gè)脈沖之間的相關(guān)信息,所以目標(biāo)檢測(cè)能力有限。而激光測(cè)距機(jī)數(shù)字信號(hào)處理器可以利用多個(gè)脈沖之間的相關(guān)信息。目標(biāo)匹配和跟蹤算法利用多個(gè)脈沖之間的相關(guān)信息 ,降低了 目標(biāo)
2017-11-09 14:11:4210 當(dāng)前隨著3D相機(jī)在智能機(jī)器人領(lǐng)域的廣泛運(yùn)用,越來(lái)越多的學(xué)者投入到了基于3D相機(jī)深度圖像的室內(nèi)三維平面分割研究當(dāng)中。文運(yùn)用了一種快速而且比較穩(wěn)定的方法去檢測(cè)復(fù)雜的平面,其中深度圖像是運(yùn)用Kinect
2017-11-16 10:10:124 垛鋼帶上的特征點(diǎn)進(jìn)行距離約束,選取適量的特征點(diǎn)作為最終特征點(diǎn),利用特征匹配到的角點(diǎn)坐標(biāo)點(diǎn)和雙目測(cè)距公式計(jì)算獲得鋁錠垛的位姿信息。
2017-11-24 09:47:440 摘要: 為了確保激光測(cè)距機(jī)的性能,首先需要進(jìn)行性能檢測(cè)。在分析傳統(tǒng)激光測(cè)距性能檢測(cè)時(shí)因受位置和天氣條件的限制,故提出了模擬激光測(cè)距機(jī)的工作原理和激光傳輸過程的思路,研究了一個(gè)實(shí)現(xiàn)該思路的方案
2018-01-19 01:21:01203 雙目立體測(cè)量的特點(diǎn)類似于“雙目導(dǎo)航、定位”,一般來(lái)說(shuō):第一、需要提取的點(diǎn)不多,僅把被測(cè)物需要測(cè)量部分的點(diǎn)找到即可;第二、速度要求較高,一般要求一秒中測(cè)量多個(gè)產(chǎn)品;第三、對(duì)光照環(huán)境要求高。因?yàn)闇y(cè)量的時(shí)候相機(jī)和被測(cè)物必然有相對(duì)位移,所以拍攝到的圖像可能各個(gè)角度都會(huì)有。
2018-01-23 11:32:5322024 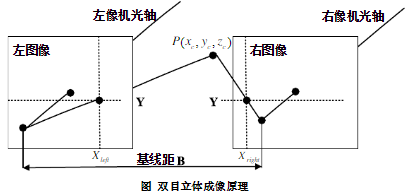
進(jìn)行處理后得到距離的測(cè)量方式。視覺測(cè)距是被動(dòng)測(cè)距中一個(gè)比較重要的分支,主要分為單目式測(cè)距、雙目式測(cè)距以及結(jié)構(gòu)光測(cè)距。雙目視覺測(cè)距測(cè)量精度高,但是算法復(fù)雜,運(yùn)算時(shí)間長(zhǎng),特征匹配難,工作環(huán)境要求嚴(yán)苛,因此,其研究
2018-02-08 11:49:440 6月27日,MYNTAI(小覓智能)正式發(fā)布公司旗下雙目硬件系列新品——小覓雙目攝像頭深度版
2018-07-05 16:40:258218 機(jī)器人創(chuàng)新生態(tài)獲悉小覓智能CEO龐琳勇博士獲邀出席了“MWCS世界移動(dòng)大會(huì)·上海 2018服務(wù)機(jī)器人核心技術(shù)與人工智能創(chuàng)新發(fā)展論壇”,于論壇現(xiàn)場(chǎng)正式發(fā)布了公司旗下雙目硬件系列新品——小覓雙目攝像頭深度版(MYNT EYE Depth)。
2018-07-24 17:46:305036 在這篇論文中,我們介紹了ActiveStereoNet,這是主動(dòng)雙目立體成像系統(tǒng)(active stereo systems)的第一個(gè)深度學(xué)習(xí)解決方案。由于缺乏ground truth,我們的方法
2018-07-29 10:17:5410238 
本屆WRC,MYNTAI小覓智能首次以視覺識(shí)別技術(shù)軟硬件解決方案提供商的身份參展,會(huì)上同時(shí)展出了小覓雙目攝像頭標(biāo)準(zhǔn)版(MYNT EYE Standard)和小覓雙目攝像頭深度版beta兩款深度相機(jī)(以下簡(jiǎn)稱S版和D版)。
2018-08-29 15:51:286618 由于傳統(tǒng)的激光測(cè)距性能檢測(cè)必須到室外對(duì)目標(biāo)靶進(jìn)行檢測(cè),并且受到天氣條件的限制,使得技術(shù)普查和日常維護(hù)受到很大的制約。為了克服以上問題,一種基于AVR單片機(jī)的激光測(cè)距機(jī)綜合性能檢測(cè)設(shè)備,借助該設(shè)備
2019-02-06 09:17:002605 
在Apollo生態(tài)系統(tǒng)的大家庭里,在物流、工程等作業(yè)場(chǎng)景也得到了創(chuàng)新應(yīng)用。會(huì)上,李彥宏還宣布了另一個(gè)量產(chǎn)“驚喜”——搭載中科慧眼雙目雙焦相機(jī)的新石器無(wú)人作業(yè)車也已量產(chǎn)下線了。
2018-09-04 17:30:376332 隨著科學(xué)技術(shù)的不斷發(fā)展,在測(cè)距領(lǐng)域也先后出現(xiàn)了激光測(cè)距、微波雷達(dá)測(cè)距、超聲波測(cè)距及紅外線測(cè)距等方式。
2019-01-02 14:28:015125 針對(duì)動(dòng)車( CRH)車身尺寸范圍大、檢測(cè)項(xiàng)目復(fù)雜、車型變化多,不容易實(shí)現(xiàn)在線測(cè)量的難題,首先提出了大型動(dòng)車車身關(guān)鍵尺寸的測(cè)量方案,利用雙目電荷耦合裝置( CCD)立體視覺建立各個(gè)關(guān)鍵尺寸的視覺測(cè)量
2019-01-03 11:10:064 小覓雙目深度相機(jī)系列產(chǎn)品,均采用“雙目+IMU”的慣性導(dǎo)航核心硬件方案組合,內(nèi)置六軸IMU傳感器,利用雙目和IMU數(shù)據(jù)的互補(bǔ)性,能為視覺以及空間移動(dòng)算法的研發(fā)提供數(shù)據(jù)校正,IMU與圖像的同步精度高
2019-01-14 15:07:184356 眾所周知,自動(dòng)駕駛、動(dòng)作捕捉等場(chǎng)景非常依賴雙目立體相機(jī)采集圖像、位姿信息的清晰度、豐富度,單位時(shí)間內(nèi)雙目相機(jī)提供的信息越多,越有利于相關(guān)場(chǎng)景的算法追蹤及定位,降低算法開發(fā)難度。 正因如此,為了滿足
2020-03-21 15:43:34812 自動(dòng)駕駛、動(dòng)作捕捉等場(chǎng)景非常依賴雙目立體相機(jī)采集圖像、位姿信息的清晰度、豐富度,單位時(shí)間內(nèi)雙目相機(jī)提供的信息越多,越有利于相關(guān)場(chǎng)景的算法追蹤及定位,降低算法開發(fā)難度。
2019-04-11 18:21:132941 在雙目相機(jī)領(lǐng)域是非常煎熬和糾結(jié)的,煎熬來(lái)自哪里呢?
2019-07-11 16:39:195748 視覺的CCD測(cè)距技術(shù)。雙目立體視覺的基本原理是模仿人眼與人類視覺的立體感知過程,從兩個(gè)視點(diǎn)觀察同一景物,以獲取不同視角下的感知圖像,通過三角測(cè)量原理計(jì)算圖像像素間的位置偏差,以獲取景物的三維信息。一個(gè)完整的CCD測(cè)距系統(tǒng)通
2019-11-26 12:05:396 據(jù)外媒報(bào)道,微軟已申請(qǐng)了一項(xiàng)被稱為“深度多光譜”相機(jī)的專利。該專利有望用于未來(lái)的Surface設(shè)備上,包括Surface Duo和Neo。據(jù)介紹,微軟研發(fā)的這項(xiàng)多光譜相機(jī)在某些方面要?jiǎng)龠^蘋果的TrueDepth相機(jī)。
2019-12-16 11:21:192373 1.1. 雙目視覺簡(jiǎn)介 雙目視覺廣泛應(yīng)用在機(jī)器人導(dǎo)航,精密工業(yè)測(cè)量、物體識(shí)別、虛擬現(xiàn)實(shí)、場(chǎng)景重建,勘測(cè)領(lǐng)域。 什么是雙目視覺? 雙目視覺是模擬人類視覺原理,使用計(jì)算機(jī)被動(dòng)感知距離的方法。從兩個(gè)或者
2020-10-23 09:51:5710867 
先說(shuō)一下單/雙目的測(cè)距原理區(qū)別: 單目測(cè)距原理: 先通過圖像匹配進(jìn)行目標(biāo)識(shí)別(各種車型、行人、物體等),再通過目標(biāo)在圖像中的大小去估算目標(biāo)距離。這就要求在估算距離之前首先對(duì)目標(biāo)進(jìn)行準(zhǔn)確識(shí)別,是汽車
2020-11-05 10:07:394875 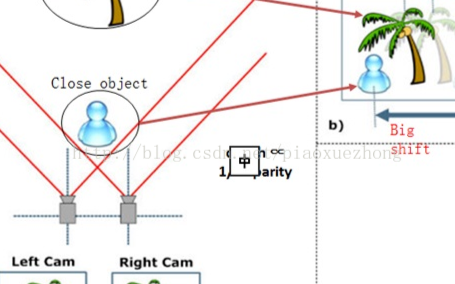
上一期小編給大家介紹了TOF 與雙目結(jié)構(gòu)光的對(duì)比,那在深度相機(jī)的應(yīng)用方案種還有結(jié)構(gòu)光的攝像方案。今天小編就跟大家來(lái)聊一聊結(jié)構(gòu)光,順便也捋一捋這三者的對(duì)比。 結(jié)構(gòu)光 結(jié)構(gòu)光技術(shù)就是使用提前設(shè)計(jì)好的具有
2020-11-19 14:37:192893 這幾天把基于opencv C++ api將魚眼鏡頭的雙目標(biāo)定以及測(cè)距功能實(shí)現(xiàn)完畢,效果還可以,至少對(duì)齊得非常棒。 這里把其流程及其關(guān)鍵函數(shù)在這...
2020-12-08 22:11:06939 雙目攝像頭標(biāo)定是測(cè)距及其三維建模非常重要的步驟,因?yàn)闃?biāo)定出來(lái)的內(nèi)外參數(shù)將會(huì)用來(lái)對(duì)原始圖像進(jìn)行反畸變校正,而反畸變的效果對(duì)立體匹...
2020-12-08 22:27:24546 為改善單目圖像語(yǔ)義分割網(wǎng)絡(luò)對(duì)圖像深度變化區(qū)域的分割效果,提出一種結(jié)合雙目圖像的深度信息和跨層次特征進(jìn)行互補(bǔ)應(yīng)用的語(yǔ)義分割模型。在不改變已有單目孿生網(wǎng)絡(luò)結(jié)構(gòu)的前提下,利用該模型分別提取雙目左、右輸入
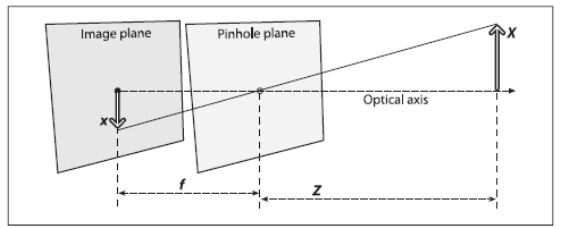
2021-03-19 14:35:2420 ,最簡(jiǎn)單的單目成像是基于小孔成像的原理,三維空間中的點(diǎn)經(jīng)過透視投影過程映射到圖像平面上,如此一來(lái)在透視線上的空間點(diǎn)都落在像平面上的同一點(diǎn)處。 所以普遍認(rèn)為單目相機(jī)缺乏深度信息無(wú)法測(cè)距。(這里僅從成像原理出發(fā),當(dāng)然現(xiàn)
2021-04-26 13:36:393497 
前言 雙目立體視覺,由兩個(gè)攝像頭組成,像人的眼睛能看到三維的物體,獲取物體長(zhǎng)度、寬度信息,和深度的信息;單目視覺獲取二維的物體信息,即長(zhǎng)度、寬度。 1)雙目攝像頭 常見的雙目攝像頭有以下幾款: 能看
2021-04-26 14:19:438965 
在這里我們所說(shuō)的雙目標(biāo)定是狹義的,講解理論的時(shí)候僅指兩臺(tái)相機(jī)之間相互位置的標(biāo)定,在代碼實(shí)踐的時(shí)候,我們才說(shuō)完整的雙目標(biāo)定。
2021-07-04 11:04:1610836 
以下四個(gè)示例設(shè)計(jì)演示了如何使用OptiSystem模擬光檢測(cè)和測(cè)距系統(tǒng)(LIDAR),具體如下:
2021-09-09 13:54:551703 說(shuō)到相機(jī),大家都不陌生了,如今基本上人手一臺(tái)相機(jī)或能拍照的手機(jī)。而在很多人不怎么涉足和了解的工業(yè)生產(chǎn)領(lǐng)域,工業(yè)相機(jī)在產(chǎn)品生產(chǎn)和檢測(cè)過程中起到了舉足輕重的作用。今天就由昊天宸小編為大家介紹工業(yè)相機(jī)
2021-12-24 15:51:281337 雙目攝像頭標(biāo)定是測(cè)距及其三維建模非常重要的步驟,因?yàn)闃?biāo)定出來(lái)的內(nèi)外參數(shù)將會(huì)用來(lái)對(duì)原始圖像進(jìn)行反畸變校正,而反畸變的效果對(duì)立體匹...
2022-01-25 20:04:562 深度相機(jī)也具備普通相機(jī)的一些不足,容易受視差影響:包括黑色物體(特征點(diǎn)少)、透明物體(光的穿透)、光滑物體(光反射太強(qiáng))、圖像無(wú)紋理(特征點(diǎn)少)、過度曝光(特征點(diǎn)少)等。
2022-03-11 13:38:5711752 機(jī)器視覺可代替人眼對(duì)物體進(jìn)行檢測(cè)和識(shí)別,較為常見的是利用單目攝像頭。若要獲取物體的深度信息,僅憑單目攝像頭是不完善的,通常情況下需選擇雙目攝像頭來(lái)獲取物體三維信息。
2022-04-07 09:42:442123 奧比中光iToF和結(jié)構(gòu)光新品相機(jī),今日聯(lián)袂上線!6月13日,奧比中光發(fā)布Femto W與Persee+深度相機(jī),進(jìn)一步完善智能視覺產(chǎn)品線。
2022-06-14 10:41:381691 奧比中光iToF和結(jié)構(gòu)光新品相機(jī),今日聯(lián)袂上線!6月13日,奧比中光發(fā)布Femto W與Persee+深度相機(jī),進(jìn)一步完善智能視覺產(chǎn)品線。Femto W是奧比中光基于iToF智能視覺平臺(tái)研發(fā)的高性能
2022-06-14 11:17:241323 深度信息恢復(fù)是計(jì)算機(jī)視覺領(lǐng)域的一個(gè)重要研究?jī)?nèi)容。使用傳統(tǒng)的光學(xué)成像系統(tǒng)對(duì)不同距離的物體成像時(shí),需要機(jī)械移動(dòng)會(huì)造成圖像放大率變化,導(dǎo)致深度測(cè)量產(chǎn)生誤差。近年來(lái),電控調(diào)焦的液晶透鏡光學(xué)成像系統(tǒng)已實(shí)現(xiàn)對(duì)焦、變焦、深度測(cè)量等功能,利用液晶透鏡光學(xué)成像系統(tǒng)進(jìn)行雙目立體視覺深度測(cè)量可以擴(kuò)張雙目深度測(cè)量范圍。
2022-06-14 13:43:182266 使用神經(jīng)網(wǎng)絡(luò)解決方案(圖 1),我們可以使用 HVX 模塊同時(shí)對(duì)兩個(gè)相機(jī)圖像進(jìn)行邊緣檢測(cè)過程。一個(gè)相機(jī)上的邊緣檢測(cè)圖像使用反饋指針傳遞給另一個(gè)相機(jī)。
2022-06-22 15:34:32559 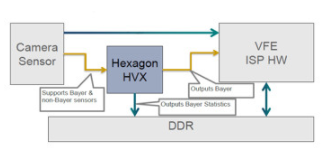
雙目標(biāo)定和普通相機(jī)的標(biāo)定一樣,其標(biāo)定時(shí)不僅標(biāo)定出兩個(gè)相機(jī)的內(nèi)參,還要標(biāo)定出兩個(gè)相機(jī)之間的關(guān)系。因此,在進(jìn)行雙目標(biāo)定時(shí),需要使兩個(gè)相機(jī)對(duì)同一標(biāo)定板進(jìn)行多次取圖,分別標(biāo)定出各自的內(nèi)參和相對(duì)于標(biāo)定板的外參,然后便可計(jì)算出兩相機(jī)位置間的關(guān)系:
2022-10-10 17:25:311009 的python3.6的虛擬環(huán)境) yolov5模型版本:YOLO v5s 雙目攝像頭間距:12cm 雙目攝像頭焦距:100度/3mm 雙目攝像頭輸出分辨率為:2560*720。
2022-10-18 14:23:253 以下四個(gè)示例設(shè)計(jì)演示了如何使用OptiSystem模擬光檢測(cè)和測(cè)距系統(tǒng)(LIDAR),具體如下:
2022-11-18 11:10:391274 簡(jiǎn)單來(lái)說(shuō),基于雙目立體視覺的測(cè)距類似人類的雙眼,和基于TOF、結(jié)構(gòu)光原理的測(cè)距不同,它不對(duì)外主動(dòng)投射光源,完全依靠拍攝的兩張圖片( RGB 或者灰度圖)來(lái)計(jì)算距離。
2022-11-18 14:21:284207 ST散斑雙目不僅采用了創(chuàng)新的紅外投射技術(shù),還結(jié)合立體匹配算法,在保障三維重建精度,具備極強(qiáng)的抗環(huán)境光干擾能力的同時(shí),成像最快僅需0.23 s,以高速節(jié)拍賦能高效生產(chǎn)。
2022-11-24 15:18:301542 雙目當(dāng)然可以算視差和深度了,即使沒有檢測(cè)出障礙物(因?yàn)橛懈郊拥?b class="flag-6" style="color: red">深度信息,檢測(cè)器會(huì)比單目好),也會(huì)報(bào)警。問題是,雙目視覺系統(tǒng)估計(jì)視差沒那么容易,立體匹配是計(jì)算機(jī)視覺典型的難題,基線寬得到遠(yuǎn)目標(biāo)測(cè)距準(zhǔn),而基線短得到近目標(biāo)測(cè)距結(jié)果好,這里是存在折衷的。
2022-12-20 16:16:35408 在這里我們所說(shuō)的雙目標(biāo)定是狹義的,講解理論的時(shí)候僅指兩臺(tái)相機(jī)之間相互位置的標(biāo)定,在代碼實(shí)踐的時(shí)候,我們才說(shuō)完整的雙目標(biāo)定。
2022-12-28 17:17:241978 視覺引導(dǎo)的室內(nèi)搬運(yùn)或者無(wú)人配送這種場(chǎng)景,有沒有合適的深度相機(jī)或雙目相機(jī)推薦?雙目相機(jī)的算力要求有多高啊?TOF和結(jié)構(gòu)光相機(jī)適合這種場(chǎng)景嗎?
2023-01-04 10:14:311546 由于攝像頭擺放的關(guān)系,左右攝像頭的f, cx, cy都是不相同的。而為了使左右視圖達(dá)到完全平行對(duì)準(zhǔn)的理想形式從而達(dá)到數(shù)學(xué)上運(yùn)算的方便,立體 校準(zhǔn)所做的工作事實(shí)上就是在左右像重合區(qū)域最大的情況下。
2023-03-06 14:59:041283 雙目測(cè)距的原理就說(shuō)到這里,為了避免大家看到大段純敘述性的文字頭暈,下面的行文將會(huì)以FAQ的形式圍繞著實(shí)現(xiàn)雙攝像頭測(cè)距過程中碰到的幾點(diǎn)疑惑展開。
2023-04-26 16:47:373406 
輸入數(shù)據(jù)來(lái)源可以是單目視覺相機(jī)、雙目視覺相機(jī),數(shù)據(jù)可以是灰度圖或者彩色圖。
基于單目圖片的稱為單目車道線檢測(cè)技術(shù),基于雙目圖片的稱為雙目車道線檢測(cè)技術(shù)。
2023-06-01 14:18:320 ,本次展位號(hào):W1館1368。
此次參展,維視智造將圍繞深度視覺系統(tǒng)解決方案、多相機(jī)并行檢測(cè)、超高速視覺檢測(cè)、視覺引導(dǎo)定位、超高精密測(cè)量、線掃高速檢測(cè)6大應(yīng)用
2021-03-09 10:26:241073 
高光譜相機(jī)(Hyperspectral Imaging, HSI)是一種具有非常高光譜分辨率的成像技術(shù)。它能夠捕獲到一個(gè)物體的大量光譜特征,從而對(duì)物體進(jìn)行深入的物理或化學(xué)屬性分析。在燒傷深度檢測(cè)
2023-06-30 11:59:55363 
首先,課程介紹了雙目相機(jī)標(biāo)定的基礎(chǔ)知識(shí)。我了解到雙目相機(jī)是由兩個(gè)相機(jī)組成的系統(tǒng),通過同時(shí)拍攝目標(biāo)物體的兩個(gè)視角來(lái)獲取三維信息。
2023-07-03 14:25:061922 
? 在深度相機(jī)的主流技術(shù)方案Structure Light,ToF,Stereo Dual)中,主動(dòng)雙目成像方案可以基于低成本的硬件,獲得高分辨率、高精度的深度圖像,但是立體匹配算法(stereo
2023-07-04 11:33:511524 
電子發(fā)燒友網(wǎng)站提供《FPGA相機(jī)邊緣檢測(cè)開源分享.zip》資料免費(fèi)下載
2023-07-10 09:39:590 相機(jī)硬件產(chǎn)品。 奧比中光Gemini 2入選中國(guó)信通院“鑄基計(jì)劃” Gemini 2 是一款搭載了奧比中光全新深度引擎芯片MX6600的雙目結(jié)構(gòu)光3D相機(jī),搭載三種深度工作模式,可為多種應(yīng)用場(chǎng)景提供高質(zhì)量的深度數(shù)據(jù)。它提供寬廣的視野,深度圖像測(cè)量范圍可達(dá)0.15 - 10m,集
2023-07-28 10:04:01752 
Gemini 2 是一款搭載了奧比中光全新深度引擎芯片MX6600的雙目結(jié)構(gòu)光3D相機(jī),搭載三種深度工作模式,可為多種應(yīng)用場(chǎng)景提供高質(zhì)量的深度數(shù)據(jù)。它提供寬廣的視野,深度圖像測(cè)量范圍可達(dá)0.15 - 10m,集成輔助點(diǎn)測(cè)距功能,可實(shí)現(xiàn)最遠(yuǎn)10m范圍內(nèi)零盲區(qū)深度測(cè)量。
2023-07-29 10:58:46521 
夠構(gòu)建一個(gè)可以檢測(cè)、分析和響應(yīng)人體運(yùn)動(dòng)的應(yīng)用程序和系統(tǒng)。代碼我們的演示視頻如下,該視頻展示了這項(xiàng)技術(shù)的實(shí)際功能。您可以看到使用虹科AI深度相機(jī)實(shí)現(xiàn)人體姿勢(shì)估計(jì)是多
2023-07-31 17:42:26553 
雙相機(jī)道路檢測(cè)方案解決傳統(tǒng)道路檢測(cè)難題 目前國(guó)內(nèi)道路檢測(cè)常用的單相機(jī)檢測(cè)方案在一些特殊情況下,如遇到裂縫平行于路面方向,路面特殊材質(zhì)或高吸光率,路面存在凹凸等情況,會(huì)產(chǎn)生漏拍裂縫或裂縫
2023-12-14 11:40:57
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論