步進(jìn)電機(jī)都是通過脈沖信號(hào)控制的,一般都是一個(gè)用來產(chǎn)生一定頻率脈沖的單片機(jī)(脈沖頻率用來控制速度),經(jīng)過信號(hào)隔離放大(達(dá)到驅(qū)動(dòng)電機(jī)的電壓)來驅(qū)動(dòng)控制步進(jìn)電機(jī)。
2013-08-19 10:04:28 4162
4162 對(duì)步進(jìn)電機(jī)的控制通常使用PWM控制,改變頻率來控制速度,然后統(tǒng)計(jì)脈沖個(gè)數(shù)知道電機(jī)當(dāng)前位置,可以很容易實(shí)現(xiàn)加減速規(guī)劃,或者不考慮加減速平穩(wěn)性,直接以小于最大啟動(dòng)速度的速度啟動(dòng),發(fā)完給定個(gè)脈沖后直接
2022-10-14 11:28:383482 控制脈沖個(gè)數(shù)來控制角位移量,達(dá)到準(zhǔn)確定位的目的。有特別需要的還可以通過控制脈沖頻率,來控制電機(jī)轉(zhuǎn)動(dòng)的速度和加速度,從而達(dá)到調(diào)速的目的。
2023-03-08 15:12:392734 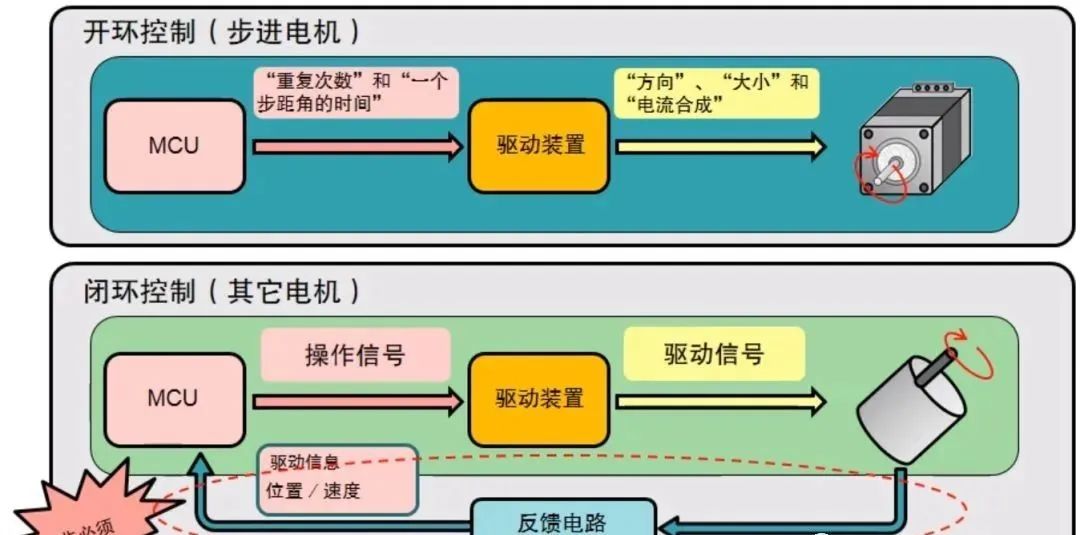
但隨著伺服閉環(huán)控制在高速度,高響應(yīng),高精度這“三高”上表現(xiàn)越來越出色,步進(jìn)電機(jī)也開始往閉環(huán)控制上發(fā)展。越來越多廠商推出一體化閉環(huán)電機(jī),填補(bǔ)開環(huán)的步進(jìn)電機(jī)和高性能伺服電機(jī)中間階段的空白。當(dāng)然有人說步進(jìn)
2021-09-10 09:44:467564 電子發(fā)燒友網(wǎng)報(bào)道(文/李寧遠(yuǎn))在談?wù)?b class="flag-6" style="color: red">電機(jī)的時(shí)候控制是繞不開的話題,大致上對(duì)控制來進(jìn)行分類有開環(huán)控制和閉環(huán)控制兩種。開環(huán)控制的特點(diǎn)是系統(tǒng)的輸出量不會(huì)對(duì)系統(tǒng)的控制作用發(fā)生影響。閉環(huán)控制是將輸出量直接
2023-12-05 01:18:002131 
控制器的輸出信號(hào)為雙脈沖,能否控制單脈步進(jìn)驅(qū)動(dòng)器驅(qū)動(dòng)兩相步進(jìn)電機(jī)?
2023-04-04 16:42:23
**步進(jìn)電機(jī)開環(huán)控制步進(jìn)電機(jī)開環(huán)伺服系統(tǒng)的一般構(gòu)成步進(jìn)電動(dòng)機(jī)的電樞通斷電次數(shù)和各相通電順序決定了輸出角位移和運(yùn)動(dòng)方向,控制脈沖分配頻率可實(shí)現(xiàn)步進(jìn)電動(dòng)機(jī)的速度控制。因此,步進(jìn)電機(jī)控制系統(tǒng)一般采用開環(huán)
2021-07-07 06:56:09
`步進(jìn)電機(jī)的閉環(huán)控制最主要就是可靠性,開環(huán)有失步的風(fēng)險(xiǎn),失步后控制系統(tǒng)不知道,照常發(fā)脈沖,其實(shí)機(jī)器已經(jīng)失控。閉環(huán)后不會(huì)有失步現(xiàn)象,如果碰到?jīng)_擊力矩大的,造成無法繼續(xù)運(yùn)轉(zhuǎn),電機(jī)會(huì)以最大力矩頂住障礙物
2018-09-05 11:02:31
誤差在毫米級(jí),所以在精確控制領(lǐng)域,是不能接受的。另外,為了提高運(yùn)行精度,步進(jìn)系統(tǒng)的驅(qū)動(dòng)采用多細(xì)分,有的大于16,假如用在往復(fù)運(yùn)動(dòng)過程中,誤差大的驚人。已經(jīng)不能適應(yīng)加工領(lǐng)域。為此,提出步進(jìn)電機(jī)全閉環(huán)控制系統(tǒng),以適應(yīng)目前運(yùn)動(dòng)控制領(lǐng)域的需求。
2019-06-24 07:43:27
步進(jìn)電機(jī)單雙脈沖控制是什么?
2021-12-21 07:42:56
步進(jìn)電機(jī)的開環(huán)控制分析
2021-01-22 06:57:59
前言 上一講我們已成功實(shí)現(xiàn)基于STM32定時(shí)器的步進(jìn)電機(jī)開環(huán)速度控制,這一節(jié)將介紹步時(shí)電機(jī)的開環(huán)電流控制,步進(jìn)電機(jī)內(nèi)阻較大,在電機(jī)停機(jī)或堵轉(zhuǎn)時(shí)其電流可近視為 I = U/R。其中R是常量,控制U
2021-07-08 07:37:53
為適應(yīng)步進(jìn)電機(jī)的運(yùn)動(dòng)控制領(lǐng)域需求,提出了步進(jìn)電機(jī)的全閉環(huán)控制系統(tǒng)。通過編碼器實(shí)時(shí)反饋,調(diào)整脈沖的輸出,采取相應(yīng)的辦法。 步進(jìn)電機(jī)由于結(jié)構(gòu)簡(jiǎn)單、維修方便、沒有積累誤差,運(yùn)行穩(wěn)定,而且制作
2016-01-11 15:55:53
步進(jìn)電機(jī)的概述步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機(jī),應(yīng)用極為廣泛。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,當(dāng)步進(jìn)驅(qū)動(dòng)器接收
2021-07-08 08:38:59
步進(jìn)電機(jī)速度控制方法步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元步進(jìn)電機(jī)件。步進(jìn)電機(jī)是將脈沖信號(hào)轉(zhuǎn)化成為角位移或者線位移的,所以步進(jìn)電機(jī)只能夠由數(shù)字信號(hào)控制運(yùn)行的,當(dāng)脈沖提供給驅(qū)動(dòng)器
2016-01-11 15:02:13
》這本書,進(jìn)行的學(xué)習(xí)過程中的知識(shí)記錄和心得體會(huì)的記錄。5.6 閉環(huán)控制??步進(jìn)電機(jī)基本上以開環(huán)電路驅(qū)動(dòng),用于位置控制。換句話說,步進(jìn)電機(jī)以外的電機(jī)尤其是高精度的步進(jìn)電機(jī)之外并沒有做開環(huán)控制定位的,而用開環(huán)電路驅(qū)動(dòng)的電機(jī)只有步進(jìn)電機(jī)。例如無刷電機(jī),首先為切換相,
2021-07-07 06:18:52
三、步進(jìn)電機(jī)的控制步進(jìn)電機(jī)的控制從控制形式上看,有開環(huán)控制和閉環(huán)控制。開環(huán)控制步進(jìn)電機(jī)系統(tǒng)的主要特點(diǎn)是能實(shí)現(xiàn)精確位移、精確定位,且無積累誤差。這是因?yàn)?b class="flag-6" style="color: red">步進(jìn)電機(jī)的運(yùn)動(dòng)受輸入脈沖控制,其位移是斷續(xù)的,總
2021-07-08 06:44:25
開環(huán)控制是什么?閉環(huán)控制又是什么?二者有何區(qū)別?
2021-09-06 07:22:03
基于ATMEGA32的脈沖控制2相4線步進(jìn)電機(jī),要求!!!!輸出脈沖平穩(wěn)。。。求各位大俠幫幫忙!!
2012-09-05 18:21:32
的解決方案。實(shí)際上,步進(jìn)系統(tǒng)是唯一的一個(gè)不需反饋就具備位置控制能力的運(yùn)動(dòng)技術(shù),但是當(dāng)步進(jìn)電機(jī)以開環(huán)方式驅(qū)動(dòng)負(fù)載時(shí),在指令步和實(shí)際步之間存在失去同步的潛在可能性。?閉環(huán)控制指被控的輸出以一定方式返回到作為控制
2022-11-12 11:24:12
0、引言實(shí)驗(yàn)材料類目型號(hào)MCUN76E003步進(jìn)電機(jī)42步進(jìn)步進(jìn)電機(jī)驅(qū)動(dòng)器設(shè)置800細(xì)分電源24VTTLCH3401、程序邏輯1.1、程序采用PWM中斷,實(shí)現(xiàn)對(duì)PWM脈沖計(jì)數(shù),由此實(shí)現(xiàn)開環(huán)控制步進(jìn)
2021-07-08 07:12:27
什么叫SPWM變頻電源的雙閉環(huán)控制?中港揚(yáng)盛變頻電源電壓、電流雙閉環(huán)控制系統(tǒng)是一種多環(huán)系統(tǒng),設(shè)計(jì)多環(huán)系統(tǒng)的一般方法 是從內(nèi)環(huán)開始,然后再逐步向外面擴(kuò)大,接著一環(huán)一環(huán)地進(jìn)高設(shè)計(jì)。CNZGYS,COM
2021-12-28 06:12:10
的工作原理:利用電子電路,將直流電變成分時(shí)供電的,多相時(shí)序控制電流,用這種電流為步進(jìn)電機(jī)供電,步進(jìn)電機(jī)才能正常工作,驅(qū)動(dòng)器就是為步進(jìn)電機(jī)分時(shí)供電的,多相時(shí)序控制器,就是說:必須用由雙環(huán)形脈沖信號(hào)功率驅(qū)動(dòng)
2019-10-14 14:26:45
1.開環(huán)進(jìn)給伺服系統(tǒng) 開環(huán)進(jìn)給伺服系統(tǒng)是數(shù)控機(jī)床中最簡(jiǎn)單的伺服系統(tǒng),執(zhí)行元件一般為步進(jìn)電機(jī),其控制原理 開環(huán)進(jìn)給伺服系統(tǒng)的精度較低,速度也受到步進(jìn)電動(dòng)機(jī)性能的限制。但由于其結(jié)構(gòu)簡(jiǎn)單,易于調(diào)整
2023-03-21 17:53:51
——2020.1.27目錄什么是控制什么是閉環(huán)控制姿態(tài)控制的目的PI...
2021-09-13 08:48:12
DM330022,dsPICDEM MCSM開發(fā)板旨在以開環(huán)或閉環(huán)(電流控制)模式控制單極和雙極步進(jìn)電機(jī)。硬件的設(shè)計(jì)使得無論是雙極還是單極配置的8,6或4線步進(jìn)電機(jī)都不需要進(jìn)行硬件更改。提供了在完全
2019-07-01 12:35:06
開閉環(huán) Open closed loop——————關(guān)于伺服電機(jī)和步進(jìn)電機(jī)的部分原理差異步進(jìn)電機(jī)與伺服電機(jī)的本質(zhì)都是通過驅(qū)動(dòng)器控制電機(jī),但是在控制原理上有不同之處。Step and servo
2021-06-28 07:10:10
對(duì)步進(jìn)電機(jī)進(jìn)行閉環(huán)控制,做了位置反饋環(huán)后還有必要做速度環(huán)嗎?
2016-03-28 11:00:51
基于51單片機(jī)的步進(jìn)電機(jī)控制對(duì)于步進(jìn)電機(jī)的控制,小白們可能會(huì)覺得很難入手,今天我就普通的五相四線制步進(jìn)電機(jī)的控制做一下講解。原理步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。在非超載
2021-07-08 07:37:12
闡述了脈沖產(chǎn)生電路以及對(duì)速度的控制。該系統(tǒng)具有成本低、控制方便的特點(diǎn)。關(guān)鍵詞: 單片機(jī); 步進(jìn)電機(jī); 開環(huán)控制步進(jìn)電機(jī)是一種將電脈沖信號(hào)變換成相應(yīng)的角位移或直線位移的機(jī)電執(zhí)行元件。控制步進(jìn)電機(jī)的輸入脈沖
2010-12-01 09:40:17
基于AVR單片機(jī)的步進(jìn)電機(jī)的閉環(huán)控制有誰做過嗎,一直困擾很久了,謝謝各位朋友了
2015-05-05 10:27:14
步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機(jī),輸入脈沖總數(shù)控制步進(jìn)電機(jī)的總旋轉(zhuǎn)角度,電機(jī)的速度由每秒輸入脈沖數(shù)目所決定,因此易實(shí)現(xiàn)機(jī)械位置的精準(zhǔn)控制。
2019-10-24 08:08:21
步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機(jī),輸入脈沖總數(shù)控制步進(jìn)電機(jī)的總旋轉(zhuǎn)角度,電機(jī)的速度由每秒輸入脈沖數(shù)目所決定,因此易實(shí)現(xiàn)機(jī)械位置的精準(zhǔn)控制。
2019-09-26 07:09:43
,不可避免會(huì)遇到各種干擾,如果采用開環(huán)控制,輸出會(huì)受到影響,不能很好的跟隨輸入。采用閉環(huán)控制,一旦有干擾產(chǎn)生,系統(tǒng)具有一定的抗擾動(dòng)能力。本文介紹了一種三相電機(jī)的閉環(huán)控制方法,采用了新華龍c8051f310
2016-01-28 17:40:38
的反饋環(huán)節(jié)。將控制器與驅(qū)動(dòng)器做成一體化,實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的閉環(huán)控制,使控制精度大大提高。關(guān)鍵詞:THB6064H;步進(jìn)電機(jī);閉環(huán)引言 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)換成角位移或線位移的一種裝置。它產(chǎn)生的位移
2012-04-29 09:23:34
,重點(diǎn)闡述了脈沖產(chǎn)生電路以及對(duì)速度的控制。該系統(tǒng)具有成本低、控制方便的特點(diǎn)。關(guān)鍵詞: 單片機(jī); 步進(jìn)電機(jī); 開環(huán)控制
2009-08-26 15:03:12
如何實(shí)現(xiàn)直流減速電機(jī)的速度閉環(huán)控制呢?怎樣解決帶編碼器直流電機(jī)的速度閉環(huán)問題?
2021-10-19 06:05:56
怎樣利用電機(jī)旋轉(zhuǎn)角度和轉(zhuǎn)速雙閉環(huán)去搭建一個(gè)雙閉環(huán)控制系統(tǒng)?雙閉環(huán)控制系統(tǒng)的結(jié)構(gòu)是由哪些部分組成的?
2021-07-22 09:25:23
STM32發(fā)出脈沖一般有哪幾種方式?怎樣通過控制器輸入脈沖去控制步進(jìn)電機(jī)呢?
2021-12-21 06:25:47
一、開環(huán)、半閉環(huán)、閉環(huán)控制方式的區(qū)別?開環(huán):發(fā)出指令后,不再管了,執(zhí)行到位沒有,不再過問。半閉環(huán):發(fā)出指令后,只檢測(cè)電機(jī)運(yùn)轉(zhuǎn)情況,不管最終執(zhí)行元件是否到位。全閉環(huán):發(fā)出指令后,檢測(cè)最終執(zhí)行元件是否
2021-07-05 08:03:59
拓達(dá)伺服步進(jìn)電機(jī)是步進(jìn)電機(jī)的位置閉環(huán)控制,那不用說了一定是位置環(huán),控制量是長(zhǎng)度(位移)。這是因?yàn)槲恢?b class="flag-6" style="color: red">控制的閉環(huán)控制策略可以大致根據(jù)控制量分三種:1.位置環(huán),就是用位移量來做閉環(huán)控制。2.速度環(huán),就是
2018-08-25 10:05:53
,可以簡(jiǎn)單的位置控制(低速)使用定時(shí)器中斷,基數(shù)脈沖個(gè)數(shù)。可以對(duì)步進(jìn)電機(jī)做梯形或者S形的加速控制。優(yōu)點(diǎn):可以降低步進(jìn)電機(jī)的開環(huán)丟步,但是頻繁中斷。關(guān)于步進(jìn)伺服電機(jī)1:單脈沖法 :參考步進(jìn)電機(jī)2:門控方式:用主從定時(shí)器門控方式,比較繁瑣;3:高級(jí)定時(shí)器T1、T8的重復(fù)計(jì)數(shù)方式 高級(jí)定時(shí)器有一個(gè)8位
2021-06-28 08:07:43
求基于步進(jìn)電機(jī)的閥門閉環(huán)控制的仿真,那位大俠幫幫忙
2012-10-22 23:44:35
本文介紹一種PLC 間通信的步進(jìn)電機(jī)遠(yuǎn)程閉環(huán)控制的方案,主要介紹了系統(tǒng)構(gòu)成、主站和從站的程序編制,步進(jìn)電機(jī)的驅(qū)動(dòng)實(shí)現(xiàn),該方案簡(jiǎn)單、實(shí)用,適合用于作業(yè)與控制分離的場(chǎng)
2009-08-15 09:28:47 35
35 基于單片機(jī)的步進(jìn)電機(jī)開環(huán)控制系統(tǒng):通過ATMEL89C51單片機(jī)對(duì)步進(jìn)電機(jī)進(jìn)行控制,主要介紹了步進(jìn)電機(jī)控制器、驅(qū)動(dòng)電路和LED顯示電路的設(shè)計(jì),實(shí)現(xiàn)了步進(jìn)電機(jī)的開環(huán)控制。在步進(jìn)電機(jī)
2009-08-25 18:27:01102 閉環(huán) 控 制 中的反饋檢測(cè)采用電流波形檢測(cè)方式。通過檢測(cè)電機(jī)繞組的電壓和電流的波動(dòng),產(chǎn)生和機(jī)械位置相對(duì)應(yīng)的脈沖作為反饋信號(hào)控制步進(jìn)電機(jī)。步進(jìn)電機(jī)工作時(shí),不論導(dǎo)通還
2010-01-12 17:19:16126 本文介紹一種PLC間通信的步進(jìn)電機(jī)遠(yuǎn)程閉環(huán)控制的方案,主要介紹了系統(tǒng)構(gòu)成、主站和從站的程序編制,步進(jìn)電機(jī)的驅(qū)動(dòng)實(shí)現(xiàn),該方案簡(jiǎn)單、實(shí)用,適合用于作業(yè)與控制分離的場(chǎng)合
2010-07-20 15:12:4235 單片機(jī)控制步進(jìn)電機(jī)的原理
本資料詳細(xì)介紹鄧步進(jìn)電機(jī)的工作原理以及單片機(jī)控制步進(jìn)電機(jī)的特點(diǎn)。步進(jìn)電機(jī)是數(shù)字控制電機(jī),它將脈沖信號(hào)轉(zhuǎn)
2009-03-30 11:13:2484434 
單片機(jī)對(duì)儀表步進(jìn)電機(jī)的細(xì)分控制
儀表步進(jìn)電機(jī)
步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。在非超載的情況下,電機(jī)轉(zhuǎn)速、停止的位
2009-11-09 17:14:32888 
FPGA在步進(jìn)電機(jī)控制中的應(yīng)用
步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。可以通過控制脈沖數(shù)來控制步進(jìn)電機(jī)的角位移量,從而達(dá)到準(zhǔn)確定位的目的,同時(shí)可
2009-12-24 16:52:261645 
什么是閉環(huán)控制
閉環(huán)控制
發(fā)動(dòng)機(jī)電噴系統(tǒng)的閉環(huán)控制是一個(gè)實(shí)時(shí)的氧傳感器、計(jì)算
2010-03-12 10:03:312039 單片機(jī)的步進(jìn)電機(jī)開環(huán)控制系統(tǒng)
0 概述
步進(jìn)電機(jī)是一種將電脈沖信號(hào)變換成相應(yīng)的角位移或直線位移的機(jī)電執(zhí)行元件。控制步進(jìn)電機(jī)的輸入
2010-04-12 11:59:381658 
步進(jìn)電機(jī)由于體積精巧、價(jià)格低廉、運(yùn)行穩(wěn)定,在低端行業(yè)應(yīng)用廣泛,步進(jìn)電機(jī)運(yùn)動(dòng)控制實(shí)現(xiàn)全閉環(huán),是工控行業(yè)的一大難題。
2012-01-06 15:22:1114427 
基于數(shù)字控制的MHz頻率單脈沖電源設(shè)計(jì)_杜榮權(quán)
2017-01-08 10:47:211 基于單片機(jī)的步進(jìn)電機(jī)開環(huán)控制系統(tǒng)基于單片機(jī)的步進(jìn)電機(jī)開環(huán)控制系統(tǒng)
2021-11-30 11:55:5827 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)加一個(gè)脈沖信號(hào),電機(jī)則轉(zhuǎn)過一個(gè)步距角。
2017-06-11 09:36:2815097 海為S系列PLC有一路的高速脈沖輸出,一般情況下只能控制一臺(tái)步進(jìn)電機(jī)進(jìn)行工作。但是為了充分利用資源節(jié)約成本,可以利用正轉(zhuǎn)/反轉(zhuǎn)輸出脈沖的模式再增加兩個(gè)輸出端來控制兩臺(tái)步進(jìn)電機(jī)進(jìn)行工作。正轉(zhuǎn)脈沖和反轉(zhuǎn)
2017-10-09 09:06:143 本文介紹了開環(huán)控制系統(tǒng)與閉環(huán)控制系統(tǒng)以及手動(dòng)控制系統(tǒng)和自動(dòng)控制系統(tǒng),并舉例說明。
2017-10-15 10:41:4218 量以達(dá)到準(zhǔn)確定位的目的;同時(shí)也可以通過控制脈沖頻率來控制電機(jī)轉(zhuǎn)動(dòng)的速度和加速度而達(dá)到調(diào)速的目的。步進(jìn)電機(jī)作為一種控制用的特種電機(jī),因其沒有積累誤差(精度為100%)而廣泛應(yīng)用于各種開環(huán)控制。 1、定位原理及方案 1.1步進(jìn)
2017-11-01 10:53:279 步進(jìn)電機(jī)是靠接收脈沖電流來實(shí)現(xiàn)速度、位置和方向的控制,脈沖的多少?zèng)Q定步進(jìn)電機(jī)的位置,脈沖的速率決定電機(jī)的轉(zhuǎn)速,脈沖的方向決定電機(jī)的轉(zhuǎn)向。現(xiàn)在大多數(shù)步進(jìn)電機(jī)的控制方式就是用plc發(fā)脈沖給驅(qū)動(dòng)器,驅(qū)動(dòng)器
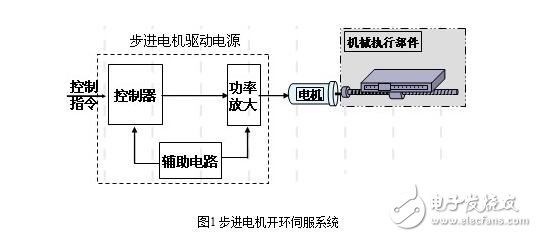
2017-12-14 15:46:1235485 進(jìn)電機(jī)作為一種常用的電氣執(zhí)行元件,廣泛應(yīng)用于自動(dòng)化控制領(lǐng)域。步進(jìn)電機(jī)的運(yùn)轉(zhuǎn)需要配備一個(gè)專門的驅(qū)動(dòng)電源,驅(qū)動(dòng)電源的輸出受外部的脈沖信號(hào)和方向信號(hào)控制。每一個(gè)脈沖信號(hào)可使步進(jìn)電機(jī)旋轉(zhuǎn)一個(gè)固定的角度,這個(gè)
2017-12-14 15:52:5320744 
步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元步進(jìn)電機(jī)件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就
2018-02-11 13:50:0014151 步進(jìn)電動(dòng)機(jī)的控制方式一般分為開環(huán)控制與閉環(huán)控制兩種控制方式,其中開環(huán)控制步進(jìn)電機(jī)最簡(jiǎn)單的控制方式就是玎環(huán)控制系統(tǒng),在這樣的控制方式下,步進(jìn)電機(jī)控制脈沖的輸入并不依賴于轉(zhuǎn)子的位置,反而是按一固定的規(guī)律
2018-04-25 14:28:54106655 
對(duì)步進(jìn)電機(jī)的控制是經(jīng)濟(jì)型數(shù)控系統(tǒng)開發(fā)時(shí)的一項(xiàng)重要內(nèi)容,其中對(duì)步進(jìn)電機(jī)運(yùn)動(dòng)過程中的升 降速控制是重點(diǎn)。步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元步進(jìn)電機(jī)件。
2018-10-26 09:23:0018048 最復(fù)雜的運(yùn)動(dòng)控制問題中有一部分是來自于流體動(dòng)力控制應(yīng)用,因?yàn)樗婕暗慕橘|(zhì)(空氣或液壓油)不會(huì)對(duì)控制輸入做出線性方式的響應(yīng)。使用開環(huán)控制還是閉環(huán)控制所進(jìn)行的選擇圍繞著反饋的概念,以及特定運(yùn)動(dòng)系統(tǒng)將反饋考慮在內(nèi)的重要性。
2019-01-08 15:24:2611565 精度的位移和速度控制,被廣泛用于精確控制領(lǐng)域。由步進(jìn)電機(jī)與驅(qū)動(dòng)電路組成的開環(huán)數(shù)控系統(tǒng)簡(jiǎn)單并且價(jià)格低廉,但有時(shí)存在振蕩和失步現(xiàn)象,故在復(fù)雜電磁環(huán)境下或是對(duì)精度要求較高的場(chǎng)合下,必須加入反饋電路組成高性能的閉環(huán)數(shù)控系統(tǒng)。本文采用旋轉(zhuǎn)編碼器作為反饋器件對(duì)步進(jìn)電機(jī)實(shí)行閉環(huán)控制。
2020-03-02 09:38:474775 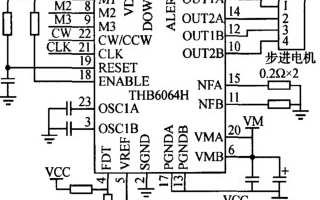
首先,我們來談?wù)?b class="flag-6" style="color: red">開環(huán)控制和閉環(huán)控制之間的區(qū)別。如果我們使用泵來維持壓力,我們可以將泵的速度設(shè)置為我們認(rèn)為可以完成的工作,并希望獲得最佳效果,并且可能會(huì)在晚上將其調(diào)低一點(diǎn)。這是一個(gè)開環(huán)控制。
2020-03-06 10:26:4612665 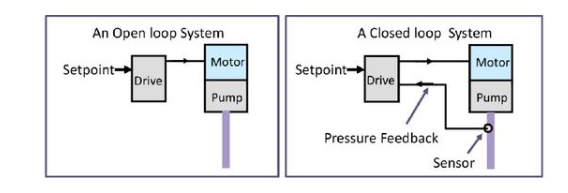
在自動(dòng)控制系統(tǒng)中我們常聽的控制系統(tǒng)有開環(huán)控制系統(tǒng)和閉環(huán)系統(tǒng)還有半閉環(huán)控制系統(tǒng),那么今天就聊一下全閉環(huán)控制系統(tǒng)。
2020-11-20 11:32:005998 系統(tǒng),給伺服控制機(jī)推送不同的單脈沖版完成不同速權(quán)部位的控制。通常采用單脈沖和模擬量輸入控制,有速率PID,轉(zhuǎn)距PID,伺服還具有意見反饋,將對(duì)意見反饋數(shù)據(jù)和輸出數(shù)據(jù)信號(hào)進(jìn)行處理,非常好的閉換控制。 閉環(huán)控制系統(tǒng)軟件,又稱意
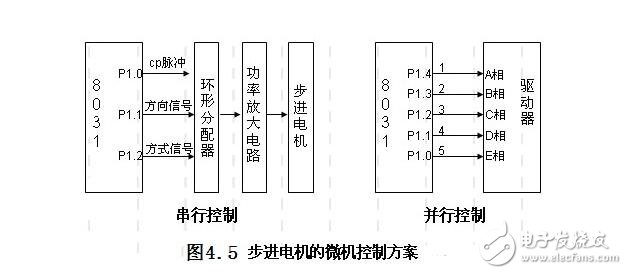
2021-07-11 15:22:496624 步進(jìn)電機(jī)驅(qū)動(dòng)系統(tǒng)。此種控制電路設(shè)計(jì)簡(jiǎn)單,功能大,可實(shí)現(xiàn)一般 步進(jìn)電機(jī)的細(xì)分任務(wù)。這個(gè)系統(tǒng)由三部分組成: 脈沖信號(hào)產(chǎn)生電路、脈沖信號(hào)分配電路、功率放大驅(qū)動(dòng)電路。 ? ? ?? 1 、 基于電子電路控制系統(tǒng) 此方案可為開環(huán)控制
2021-08-09 23:27:4715833 步進(jìn)電機(jī)控制器是一種能夠發(fā)出均勻脈沖信號(hào)并且運(yùn)用范圍廣泛的電機(jī)控制器,步進(jìn)電機(jī)控制器怎么使用?下面就由小編來簡(jiǎn)單介紹一下!
2021-07-19 09:52:575457 伴隨著科學(xué)技術(shù)的不斷進(jìn)步,伺服電機(jī)驅(qū)動(dòng)器的控制方式也在不斷增加,有模擬量、232、 CAN控制、閉環(huán)控制、開環(huán)控制等,那么今天華科星就分別來談?wù)?b class="flag-6" style="color: red">閉環(huán)控制和開環(huán)控制的區(qū)別。
2021-08-02 16:21:2511894 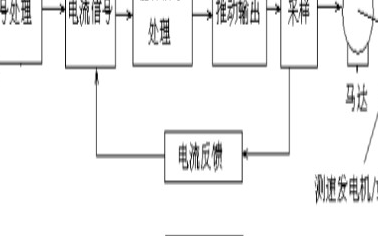
做好閉環(huán)步進(jìn)電機(jī)速度控制,是保證電機(jī)有好的控制,能夠能夠呈現(xiàn)出好的運(yùn)行效果發(fā)揮出優(yōu)勢(shì)功能的重點(diǎn)之一。所謂的控制電機(jī)運(yùn)行速度,實(shí)際上就是控制系統(tǒng)發(fā)出步進(jìn)脈沖的頻率或者換相的周期。該系統(tǒng)可用兩種辦法來確定步進(jìn)脈沖的周期。
2021-08-14 10:02:251456 無刷直流電機(jī)雙閉環(huán)控制電路(現(xiàn)代電源技術(shù)王建輝課后答案)-無刷直流電機(jī)雙閉環(huán)控制,有需要的可以參考!
2021-09-15 14:28:3346 ,是一種開環(huán)控制系統(tǒng)。 但隨著伺服閉環(huán)控制在高速度,高響應(yīng),高精度這“三高”上表現(xiàn)越來越出色,步進(jìn)電機(jī)也開始往閉環(huán)控制上發(fā)展。越來越多廠商推出一體化閉環(huán)電機(jī),填補(bǔ)開環(huán)的步進(jìn)電機(jī)和高性能伺服電機(jī)中間階段的空白。 當(dāng)然
2021-09-17 10:58:074689 【嵌入式】基于UCOSIII的電機(jī)閉環(huán)控制前言前言由于項(xiàng)目需求,需要對(duì)電機(jī)進(jìn)行閉環(huán)控制。采用UCOSIII作為開發(fā)平臺(tái),效率的確是要高很多呀。具體是需求如下:上位機(jī):通過串口向單片機(jī)發(fā)送電機(jī)轉(zhuǎn)速
2021-12-20 18:56:5515 0、引言實(shí)驗(yàn)材料類目型號(hào)MCUN76E003步進(jìn)電機(jī)42步進(jìn)步進(jìn)電機(jī)驅(qū)動(dòng)器設(shè)置800細(xì)分電源24VTTLCH3401、程序邏輯1.1、程序采用PWM中斷,實(shí)現(xiàn)對(duì)PWM脈沖計(jì)數(shù),由此實(shí)現(xiàn)開環(huán)控制步進(jìn)
2021-12-29 19:22:255 步進(jìn)電機(jī)的旋轉(zhuǎn)速度可以通過控制脈沖信號(hào)的頻率和電機(jī)驅(qū)動(dòng)方式來實(shí)現(xiàn)。
脈沖頻率控制:步進(jìn)電機(jī)的旋轉(zhuǎn)速度與脈沖信號(hào)的頻率成正比,因此可以通過調(diào)整脈沖信號(hào)的頻率來控制電機(jī)的旋轉(zhuǎn)速度。一般來說
2023-03-08 17:03:123337 前面學(xué)習(xí)了1200高速脈沖輸出功能的應(yīng)用,那1500如何輸出高速脈沖控制步進(jìn)電機(jī)呢?
2023-03-10 09:44:326582 
STM32控制步進(jìn)電機(jī):基于HAL庫定時(shí)器中斷的閉環(huán)步進(jìn)電機(jī)驅(qū)動(dòng)+精準(zhǔn)控制脈沖數(shù) 一、步進(jìn)電機(jī)閉環(huán)驅(qū)動(dòng)器 二、CubeMx配置 1、Clock Configuration 2、脈沖端 定時(shí)器配置
2023-03-16 09:28:474 以控制轉(zhuǎn)子轉(zhuǎn)動(dòng)的開環(huán)控制電機(jī)(可以通過安裝編碼器形成閉環(huán)系統(tǒng)),它
旋轉(zhuǎn)是以固定的角度(步距角)一步一步運(yùn)行的,故稱步進(jìn)電機(jī)。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖
信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變
2023-03-17 15:17:310 開環(huán)電機(jī)是一種沒有反饋控制的電機(jī),也稱為非閉環(huán)電機(jī)。其輸出轉(zhuǎn)速和位置由輸入控制信號(hào)決定,沒有位置或速度反饋回路來控制輸出。其特點(diǎn)是成本低、結(jié)構(gòu)簡(jiǎn)單、轉(zhuǎn)速波動(dòng)大且誤差較大,適用于一些不要求精度和負(fù)載
2023-03-19 15:14:455302 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)加一- 個(gè)脈沖信號(hào),電機(jī)則轉(zhuǎn)過
2023-03-21 11:01:202 步進(jìn)電機(jī)步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。
步進(jìn)電機(jī)收到一個(gè)脈沖,步進(jìn)電機(jī)走一個(gè)步距角。
在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于控制脈沖信號(hào)的頻率和脈沖
2023-03-22 10:42:590 轉(zhuǎn)子位置,需要含位置傳感器的位置閉環(huán)電路。而旦如果按一定速度驅(qū)動(dòng),需測(cè)出轉(zhuǎn)子的速度,此為速度閉環(huán)電路;如果想定位控制,需要含有轉(zhuǎn)子位置信號(hào)的編碼器等傳感器的 閉環(huán)電路。與開環(huán)驅(qū)動(dòng)的步進(jìn)電機(jī)相比較,含傳感器的閉環(huán)
2023-03-22 09:47:362 角位移量以達(dá)到準(zhǔn)確定位的目的;同時(shí)
也可以通過控制脈沖頻率來控制電機(jī)轉(zhuǎn)動(dòng)的速度和加速度而達(dá)到調(diào)速的目的。步進(jìn)電機(jī)作為一種控制用的特種電機(jī),因其沒有
積累誤差(精度為100%)而廣泛應(yīng)用于各種開環(huán)控制。
2023-03-23 14:19:270 在成功啟動(dòng)步進(jìn)電機(jī)之后,可通過運(yùn)行數(shù)個(gè)脈沖后停止定時(shí)器做到控制步進(jìn)電機(jī)轉(zhuǎn)動(dòng)特定角度,實(shí)現(xiàn)脈沖定位。
步進(jìn)電機(jī)是將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu),也就是當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào)后,就會(huì)驅(qū)動(dòng)電機(jī)
2023-03-23 11:36:529 角位移量以達(dá)到準(zhǔn)確定位的目的;同
時(shí)也可以通過控制脈沖頻率來控制電機(jī)轉(zhuǎn)動(dòng)的速度和加速度而達(dá)到調(diào)速的目的。步進(jìn)電機(jī)作為一種控制用的特種電機(jī),因其沒
有積累誤差(精度為100%)而廣泛應(yīng)用于各種開環(huán)控制。
2023-03-23 10:34:222 步進(jìn)電機(jī)控制器是一種能夠發(fā)出均勻脈沖信號(hào)的電子產(chǎn)品,它發(fā)出的信號(hào)進(jìn)入步進(jìn)電機(jī)驅(qū)動(dòng)器后,會(huì)由驅(qū)動(dòng)器轉(zhuǎn)換成步進(jìn)電機(jī)
所需要的強(qiáng)電流信號(hào),帶動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。步進(jìn)電機(jī)控制器能夠準(zhǔn)確的控制步進(jìn)電機(jī)轉(zhuǎn)過每一個(gè)
2023-05-05 14:16:034 電機(jī)PID控制和閉環(huán)控制 1 PID控制 1.1 位置式PID 理論公式: PID中,P用于提高響應(yīng)速度,I用于減小靜差、D用于抑制震蕩。一般在進(jìn)行PID參數(shù)整定時(shí),首先設(shè)I和D的值為0,然后
2023-05-06 11:48:082 步進(jìn)電機(jī)是一種開環(huán)控制的電機(jī),通過輸入脈沖信號(hào)來控制其轉(zhuǎn)角和方向。主要有以下幾種控制方式。
2023-09-05 10:50:251787 步進(jìn)電機(jī)開環(huán)控制與閉環(huán)控制有什么區(qū)別? 介紹步進(jìn)電機(jī)開環(huán)控制和閉環(huán)控制的區(qū)別 概述: 步進(jìn)電機(jī)是一種特殊的電機(jī),與其他電機(jī)不同的是它能夠以固定步進(jìn)角度旋轉(zhuǎn),能夠控制其轉(zhuǎn)速和轉(zhuǎn)向。步進(jìn)電機(jī)常用
2023-10-24 11:49:19823 步進(jìn)電機(jī)開環(huán)控制和閉環(huán)控制的區(qū)別概述:步進(jìn)電機(jī)是一種特殊的電機(jī),與其他電機(jī)不同的是它能夠以固定步進(jìn)角度旋轉(zhuǎn),能夠控制其轉(zhuǎn)速和轉(zhuǎn)向。步進(jìn)電機(jī)常用于控制精度要求較高的場(chǎng)合,如打印機(jī)、數(shù)碼相機(jī)等。而對(duì)
2023-10-28 08:07:461306 
步進(jìn)電機(jī)的控制方法以及所需的控制信號(hào)。 步進(jìn)電機(jī)的控制方法主要分為開環(huán)控制和閉環(huán)控制兩種。 開環(huán)控制是指根據(jù)預(yù)定的電流和時(shí)間控制信號(hào)來驅(qū)動(dòng)步進(jìn)電機(jī),根據(jù)電流和時(shí)間的確定性,可以較精確地控制電機(jī)的角度和速度。開
2023-12-20 11:21:24768
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論