?????????????45附錄三 DJK02 和DJK02-1 插座使用說明??????????49瞬時速度測量和分析實驗指導書(斯德克警用測速雷達儀)一、 實驗目的通過本次實驗,使得操作者能熟練掌握斯德克警用測速雷達儀
2008-09-22 18:50:18
瞬時極性法怎么分析?? 瞬時極性法 (Transient Electromagnetic or TEM Method)是一種測量地下電磁反應的地球物理方法。該方法基于電磁場的感應,通過在地面上施加
2023-09-17 15:42:22 191
191 測量車輛速度的最常見方法之一是使用雷達,這通常涉及產生無線電波,將其指向移動的車輛,以及測量它們返回設備的各種方式。這是一種久經考驗的真實方法,但可能昂貴且技術復雜。[GeeDub]想要一種更簡單的方法來測量經過他家的車輛
2023-06-25 17:02:55124 實時速度測量對于各種車輛來說是至關重要的,特別是那些參與運輸、物流和緊急服務的車輛,比如卡車、公共汽車、救護車、消防車、警車和軍車等車輛就需要實時測量其相對于地面的速度,以確保安全和高效的運行。因為
2023-06-16 11:33:54263 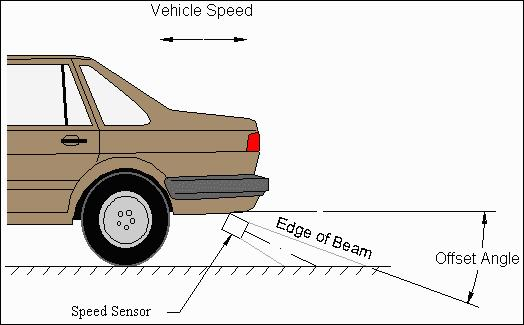
本文要點理解什么是瞬時功率。了解如何在直流和交流電路中推導出瞬時功率方程。了解瞬時功率和平均功率之間的區別。什么是瞬時功率?在物理學中,功率的定義是在一段時期內傳輸的能量大小。同時,瞬時功率指的是在
2022-12-19 11:30:55474 
電子發燒友網站提供《測量二極管的速度.zip》資料免費下載
2022-11-16 15:06:02 0
0 SJ6000激光干涉儀可實現線性、角度、直線度、垂直度、平行度、平面度、回轉軸等幾何參量的高精密測量;具有動態測量與分析功能,包括位移分析、速度分析、加速度分析、振幅和頻率分析等,可進行振動分析、絲桿導軌的動態特性分析、驅動系統的響應特性分析等測量功能。
2022-08-03 16:37:381589 
由于發射信號的多普勒效應,脈沖雷達可以方便地計算出目標的瞬時速度。FMCW雷達使用頻率來計算目標距離,多普勒效應和目標距離造成的頻差混淆在一起,不易區分開。為了克服這個問題, FMCW雷達需要發射多個不同斜率的連續波并對結果進行處理,否則容易產生虛假目標。
2022-05-05 09:16:481756 轉向能力。 如果制動時后輪抱死,汽車將出現甩尾現象。 滑移率在(10-30%)之間制動力最大 滑移率=【(車身瞬時速度-輪速)/車身瞬時速度】*100% 實驗證明當滑移率在10-30%之間時,制動力達到最大,當滑移率超過30%后,制動力下降,因此ABS系統就是將車輪的滑移率控制在
2022-04-25 08:03:33849 大二時設計過一款角速度測量裝置 ,用于測量特定物品的角速度,現整理下。實現效果是 旋轉物體開始旋轉到停止時,收到上位機信號,將測量數據傳給上位機,上位機分析后得出一條角速度曲線。 引言本項
2021-12-06 13:36:1210 之一。通常炮口初速的測量,可以通過傳統的測速方法得到。傳統測速方法從原理上可分為測瞬時速度法(如彈頭激波測速法)和測平均速度法(如通斷靶,線圈靶和光幕靶等測速法)兩類。
2021-03-28 11:53:163068 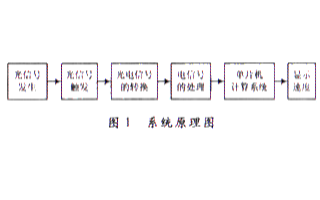
吸引住而瞬時速度下沉,使瞬時速度姿勢觸點接入或斷掉。可是活塞桿和桿杠不可以另外跟隨流線圈一起降落,由于活塞桿的上方連到制動氣室中的橡皮擦膜,當活塞桿在釋放出來彈黃的功效下逐漸向下健身運動時,橡皮擦膜隨著向下凹,上邊空氣室的空氣越來越較稀
2021-02-10 10:21:00347 ? 慣性導航系統(INS,以下簡稱慣導)是一種不依賴于外部信息、不易受到干擾的自主式導航系統。慣導通過測量載體在慣性參考系的加速度,自動進行積分運算,獲得載體的瞬時速度和瞬時位置數據,且把它變換
2021-01-15 16:29:526495 ,因此在設計工業 BLDC 系統時,主要的控制挑戰在于準確地測量電機的扭矩和速度。 為了捕獲 BLDC 電機的扭矩,需要使用多通道同步采樣模數轉換器(ADC)同時測量三個感應相電流中的兩個。由具有合適算法的微控制器計算第三個瞬時相電流。此過程
2021-01-06 09:37:383653 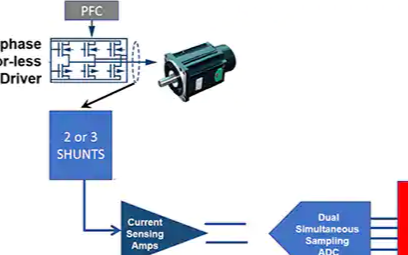
在配電系統選用的萬能式斷路器按其維護特性可分成,選擇性和非選擇性兩大類。選擇性底壓萬能式斷路器,有幾段維護和三段維護二種。在其中瞬時速度特點和短延時特點適用短路故障動作,而長延時特點適用過壓保護
2021-01-02 10:30:00968 在配電系統選用的一二次融合柱上斷路器按其維護特性可分成,選擇性和非選擇性兩大類。選擇性底壓一二次融合柱上斷路器,有幾段維護和三段維護二種。 在其中瞬時速度特點和短延時特點適用短路故障動作,而長延時
2020-12-23 14:41:511657 嫦娥五號即將結束 “太空之旅”,那么你知道嫦娥五號回家時速度有多快嗎?
2020-12-16 17:13:525153 如何區別INS和IMU的區別呢? 通過測量飛行器的加速度,并自動進行積分運算獲得飛行器瞬時速度和瞬時位置數據的技術。組成慣性導航系統的設備都安裝在運載體內,工作時不依賴外界信息也不向外界輻射能量不易
2020-06-08 17:15:177167 車載系統中慣導的應用 從慣性導航的定義來看,慣性導航是一種通過測量飛行器的加速度,并自動進行積分運算,獲得飛行器瞬時速度和瞬時位置數據的技術。組成慣性導航系統的設備都安裝在運載體內,工作時不依賴外界
2020-06-08 14:41:521784 慣性導航在車上的應用 從慣性導航的定義來看,慣性導航是一種通過測量飛行器的加速度,并自動進行積分運算,獲得飛行器瞬時速度和瞬時位置數據的技術。組成慣性導航系統的設備都安裝在運載體內,工作時不依賴外界
2020-06-01 10:21:443060 INS有哪幾部組成 通過測量飛行器的加速度,并自動進行積分運算獲得飛行器瞬時速度和瞬時位置數據的技術。組成慣性導航系統的設備都安裝在運載體內,工作時不依賴外界信息也不向外界輻射能量不易受到干擾
2020-05-18 16:59:142132 ,并自動進行積分運算獲得飛行器瞬時速度和瞬時位置數據的技術。組成慣性導航系統的設備都安裝在運載體內,工作時不依賴外界信息也不向外界輻射能量不易受到干擾,是一種自主式導航系統。捷聯式據陀螺儀的不同,分為速率型捷聯式慣性導航系統和位置
2020-05-18 16:51:155164 通過測量飛行器的加速度(慣性),并自動進行積分運算,獲得飛行器瞬時速度和瞬時位置數據的技術。 17世紀,I.牛頓研究了高速旋轉剛體的力學問題。牛頓力學定律是慣性導航的理論基礎。1852年J.傅科稱
2020-04-28 10:59:553234 如何區別INS和IMU的區別呢? 通過測量飛行器的加速度,并自動進行積分運算獲得飛行器瞬時速度和瞬時位置數據的技術。組成慣性導航系統的設備都安裝在運載體內,工作時不依賴外界信息也不向外界輻射能量不易
2020-04-16 16:39:322207 采用模擬乘法器獲取電壓、電流的乘積,得到瞬時功率,再用固定的時間對瞬時功率進行積分,即可獲得瞬時功率的平均值,也就是有功功率。該方法適用任意波形電量的有功功率測量。
2020-02-04 15:26:005351 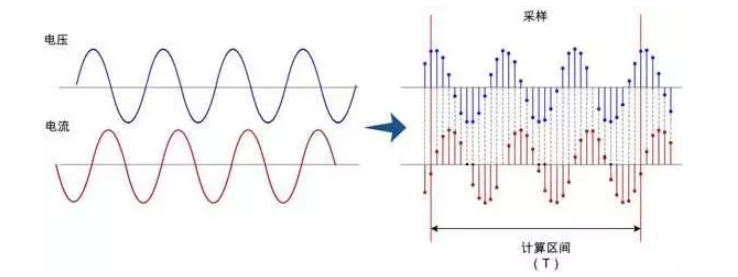
中車株洲電機公司17日發布了時速400公里高速動車組用TQ-800永磁同步牽引電機。這標志著我國高鐵動力首次搭建起時速400公里速度等級的永磁牽引電機產品技術平臺,填補了國內技術空白,為我國軌道交通牽引傳動技術升級換代奠定了堅實基礎。
2019-10-29 16:38:423528 之一。通常炮口初速的測量,可以通過傳統的測速方法得到。傳統測速方法從原理上可分為測瞬時速度法(如彈頭激波測速法)和測平均速度法(如通斷靶,線圈靶和光幕靶等測速法)兩類。
2019-09-11 08:04:001906 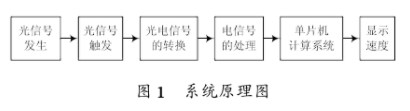
直線加減速控制方法是加減速控制方法中最為簡單的一種,也是最常用的一種。數控系統每插補一次,都要進行穩定速度、瞬時速度和加減速處理。整個過程共有加速、勻速、減速三個階段。
2019-06-21 08:04:002598 
麥姆斯咨詢:這款4D激光雷達可以在測量距離的同時獲取瞬時速度信息,并不受來自太陽或其他傳感器的干擾。
2019-04-25 15:25:093972 慣性導航(inertial navigation)是一種通過測量飛行器的加速度,并自動進行積分運算,獲得飛行器瞬時速度和瞬時位置數據的技術。組成慣性導航系統的設備都安裝在運載體內,工作時不依賴外界信息,也不向外界輻射能量,不易受到干擾,是一種自主式導航系統。
2019-03-12 09:13:5512153 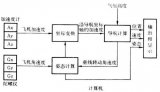
北京時間19日中午,伊隆·馬斯克乘坐特斯拉汽車,以最高時速177邁的速度,穿越洛杉磯4.3公里的地下隧道,來到位于南加州城市霍桑的 The Boring Company 產品發布現場。
2019-03-03 09:43:352672 Blackmore多普勒LiDAR在道路測試中,能夠在遠距離和高速下進行瞬時速度測量,清晰地識別整個舊金山灣區的數萬名行人、自行車和其它車輛。
2018-09-10 15:14:143512 設備中,加速度傳感器和陀螺儀對運動加速度和轉動角速度的大小測量,再經過后續的數據處理,整合后,便可在電腦軟件的協助下完成生物運動力學方面的模擬和分析工作。
2018-07-15 07:19:001447 行走。同時速度傳感器會測量得到的轉速值反饋到控制器,通過與設定速度下相應馬達轉速比較,修正輸出電流的大小,直至攤鋪機的實際運動速度與設定值相符。
2018-07-04 08:15:001558 
介紹了一種無載測功 系統的軟、硬件設計及數學模型建立。主系統采用 TI公司的 M SP430F1232,實現 了對瞬時速度的采集,結合最小二乘法,利用 M C U 的特點計算 出發動機的瞬時加速度和瞬時功率。最后,得 出相應的檢測數據和誤差分析。
2018-04-20 16:05:114 針對連續波激光雷達在同步測量目標距離和速度的應用中存在輻射信號上限峰值功率低、測量極限距離近的問題,提出一種基于Golomb脈沖序列調制的測量信號波形,研究該方法在道路環境中同步測量目標距離和速度
2018-04-17 15:37:230 的瞬時速度和位置信息,具有不依賴外界信息、不向外界輻射能量、不受干擾、隱蔽性好的特點,且慣導系統能連續地提供載體的全部導航、制導參數(位置、線速度、角速度、姿態角)。
2018-03-02 16:23:3115819 移動的寬帶與擴頻信號非常重要,而且它在通用RF信號分析中也有很多優點,可以極大提高測量速度。 RP測量一般可分為三大類,即頻譜分析、矢量分析和網絡分析。頻譜分析通常采用頻譜分析儀,它能夠提供基本測量,在許多通用場合
2017-12-07 20:28:01280 
統精度高、體積小、工作穩定。既能實時測量所測參數,又兼具黑匣子功能,能對數據進行24小時以內的記錄,為事故分析提供可靠的依據,具有較高的工程應用價值。可用與所有測負荷,測長度,測速度的場合。 關鍵詞:應變傳感器,光
2017-11-06 14:38:070 基于速度一加速度測量的炮彈彈道辨識方法,下來看看
2016-12-17 16:33:3911 基于瞬時無功型MRAS的PMSM無速度傳感器控制_韓世東
2016-12-16 15:46:102 提出了一種利用低分辨率光電編碼器實現高精度的永磁同步電機瞬時速度檢測方法.首先,根據永磁同步電機運動模型建立瞬時速度觀測器,對電機的瞬時速度和擾動轉矩進行估計;再根據電機的不同運行速度,對編碼器位置信號進行同步或異步采樣,獲得電機轉子的準確位置;然后利用位置檢測值對瞬時速度觀測器的估計值進行校正。
2016-10-14 14:17:1811 介紹位移與速度測量傳感器的基本原理和應用
2016-06-08 17:29:365 基于圖像透視畸變校正的調炮速度測量系統基于圖像透視畸變校正的調炮速度測量系統
2016-05-20 15:37:140 邏輯分析測量電路,邏輯分析測量電路,邏輯分析測量電路
2015-12-02 10:24:433 瞬時通斷測量儀是為配合此試驗而產生的設備,在繼電器抖動試驗過程中,它可準確無誤地檢測出繼電器每路觸點瞬時出現的誤動作,本文研究對此類設備的測量方法。
2011-03-24 12:09:241627 
紅外傳感器采用紅外線對射管陣列,實現多點測量,得到運動物體在測量點的即時速度和階段的加速度信息。與傳統紅外傳感器相比,采用分離式模式,分離距離可達到5 m以上,紅
2010-11-24 18:32:3492 安捷倫科技公司日前宣布推出最新的 X 系列信號分析儀選件,可提供更寬的帶寬、更快的測量速度和更強大的測量
2010-11-15 10:45:35623 基于炮彈的幾何結構及運動特點,設計了一種十二加速度計組合的無陀螺慣性測量方案用于測量彈體運動時的角速度和線加速度. 計算機仿真分析顯示這種測量方案直接解算的是
2010-10-14 16:05:1610 介紹了以AT89S8252單片機為核心的汽車瞬時燃油測量檢測系統,該系統利用汽車噴油脈沖計算瞬時噴油量,并且具有油箱油量、瞬時油耗、百公里油耗等實時顯示功能。
2010-07-06 15:26:2974 為提高現有的加速度傳感器的靈敏度,采用專用電荷放大器,同已有的數據采集器和測量分析軟件集成,組成了便攜式“微弱振動信號加速度測量系統”。實踐表明,本系統能對微弱的振
2009-06-30 09:57:1416 氣軌上測量滑塊的速度和加速度 1.掌握氣墊導軌上測滑塊的速度和加速度的一種方法。2.學習使用氣墊導軌和數字毫秒計。 如圖10-1所示,物體由靜止出發沿斜面作下滑運動
2009-06-09 09:19:3138 瞬時速度測量和分析實驗指導書
一、 實驗目的通過本次實驗,使得操作者能熟練掌握斯德克警用測速雷達儀的基本功能和使用方法,并能對所采集數據進行相關統計學分
2008-09-22 08:04:2427
自行車時速計電路
2008-05-20 22:48:25812 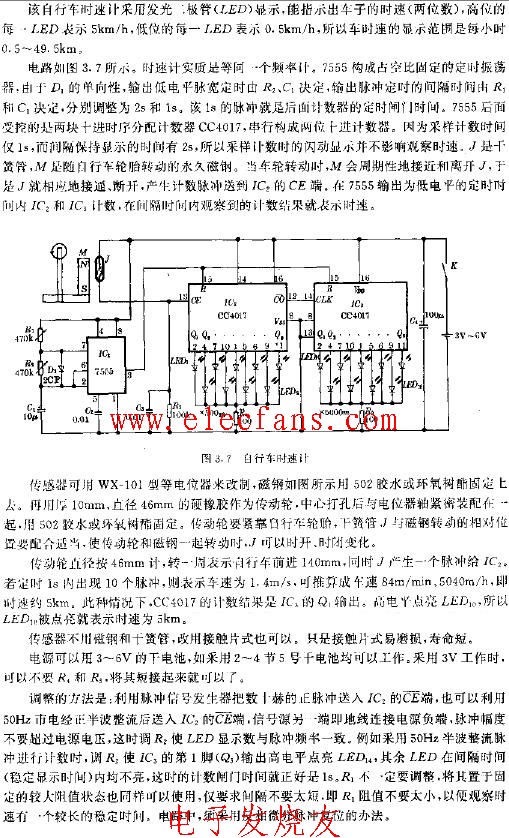
 電子發燒友App
電子發燒友App



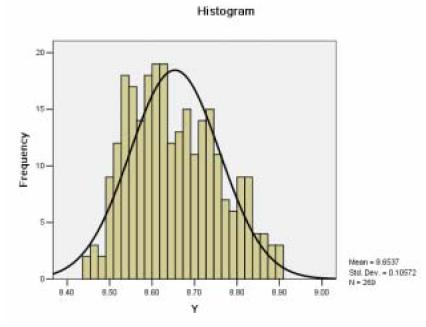 頻率分布圖
頻率分布圖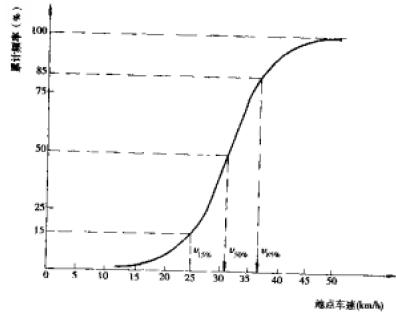 車速累計頻率分布圖
車速累計頻率分布圖






 工商網監
工商網監
評論