 電子發(fā)燒友App
電子發(fā)燒友App


必然是性能好的步進(jìn)電機(jī),在運(yùn)行效果及壽命等方面才會(huì)具備優(yōu)勢(shì),才有實(shí)現(xiàn)優(yōu)化應(yīng)用的可能。否則如果因?yàn)?a target="_blank">電機(jī)結(jié)構(gòu)設(shè)計(jì)的不好,或者是制作不夠精良等等因素,導(dǎo)致其性能不夠優(yōu)秀,那就很容易在使用中發(fā)生一些不良的狀況。
因此建議用戶(hù)都了解一下步進(jìn)電機(jī)性能特點(diǎn)情況,這樣一方面能夠讓自己在購(gòu)買(mǎi)電機(jī)的時(shí)候根號(hào)地優(yōu)化選擇產(chǎn)品,不僅選擇到優(yōu)質(zhì)能夠取得優(yōu)秀應(yīng)用表現(xiàn)的電機(jī)。另一方面也憑借自己度電機(jī)的充分了解,優(yōu)化使用操作,以促進(jìn)保證電機(jī)運(yùn)行良好,也延長(zhǎng)電機(jī)使用壽命。
關(guān)于步進(jìn)電機(jī)性能特點(diǎn),需要了解的方面其實(shí)是比較多的。比如需要大家知道,電機(jī)溫度過(guò)高可能會(huì)是磁性材料推辭,這樣會(huì)導(dǎo)致力矩下降乃至失步。所以電機(jī)外表允許的最高溫度應(yīng)取決于不同電機(jī)磁性材料的退磁點(diǎn),注意保證溫度不高過(guò)退磁點(diǎn),就不會(huì)因?yàn)闇囟纫l(fā)電機(jī)故障。不過(guò)對(duì)于這一點(diǎn)大家不用太過(guò)擔(dān)心,因?yàn)榇判圆牧系耐舜劈c(diǎn)都在攝氏130度以上,有的甚至高達(dá)攝氏200度以上,如此電機(jī)外表溫度在攝氏80-90度完全正常。
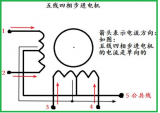
另外,關(guān)于步進(jìn)電機(jī)的性能特點(diǎn),還提醒大家注意電機(jī)轉(zhuǎn)動(dòng)的時(shí)候,電機(jī)各相繞組的電感將形成一個(gè)反向電動(dòng)勢(shì)。頻率越高,反向電動(dòng)勢(shì)越大。這個(gè)作用會(huì)導(dǎo)致電機(jī)隨頻率(或速度)的增大而相電流減小,最終引發(fā)力矩下降。
不知道大家用的步進(jìn)電機(jī)性能怎么樣呢?歡迎發(fā)表自己的意見(jiàn)。
? ? ?責(zé)任編輯:tzh
?






















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論