據(jù)麥姆斯咨詢報(bào)道,近日,專門從事調(diào)頻連續(xù)波(FMCW)激光雷達(dá)研發(fā)的美國硅谷公司Aeva表示,現(xiàn)在汽車行業(yè)采用FMCW激光雷達(dá)技術(shù)的問題是“何時(shí)”,而不是“是否”。
2024-03-11 09:38:32 203
203 UWB 頻段,相比于 24G/60G/77G 等毫米波雷達(dá)具有更好的穿透性,穿透衣服、床褥、玻璃等非金屬介質(zhì)損耗更低,不影響檢測精度
采用脈沖信號(hào)體制,相參性更好,測量精準(zhǔn)度更高
提供靈活的參數(shù)配置,以
2024-03-06 09:51:03
光源的照明產(chǎn)品。 首先,光譜是全光譜燈和普通LED燈之間最顯著的區(qū)別之一。普通LED燈只能發(fā)出有限的幾個(gè)顏色,如紅、藍(lán)、綠等,而無法發(fā)出整個(gè)可見光譜范圍內(nèi)的顏色。這意味著普通LED燈的光譜是不連續(xù)的,缺少一些特定波長的光線。相比之下,全
2024-02-18 18:07:47739 超短波的連續(xù)波和疏密脈沖波的區(qū)別? 超短波(UHF)是一種無線電波,位于300MHz至3GHz的頻譜范圍內(nèi)。在這個(gè)頻段中,超短波可以被廣泛應(yīng)用于通信、雷達(dá)、電視和無線電廣播等領(lǐng)域。超短波可以分為連續(xù)
2024-02-06 09:18:34265 雷達(dá)測速的基本原理: 雷達(dá)測速是一種常見的交通工具超速監(jiān)控手段,它借助雷達(dá)技術(shù)可以準(zhǔn)確測量車輛的速度。它的基本原理是利用雷達(dá)波束的多普勒效應(yīng)來測量目標(biāo)物的速度。 雷達(dá)測速設(shè)備通常由一個(gè)發(fā)射器
2024-02-03 14:10:35340 GKRD68脈沖型雷達(dá)物位計(jì)采用了先進(jìn)的微處理器和獨(dú)特的EchoDiscovery回波處理技術(shù),因此雷達(dá)物位計(jì)可應(yīng)用于各種復(fù)雜的工況。采用脈沖工作方式,雷達(dá)物位計(jì)發(fā)射功率極低,可安裝于
2024-01-24 09:42:05
FMCW雷達(dá)操作基礎(chǔ)
利用雷達(dá)測量雷達(dá)前方多目標(biāo)的距離
LF信號(hào)的概念與LF帶寬--距離分辨率
2024-01-23 09:45:53103 
超聲波進(jìn)行物體探測和距離測量的技術(shù)。本文將詳細(xì)介紹毫米波雷達(dá)的作用以及與超聲波雷達(dá)的區(qū)別。 一、毫米波雷達(dá)的作用 毫米波雷達(dá)被廣泛應(yīng)用于以下領(lǐng)域: 高清晰度成像:毫米波雷達(dá)具有高分辨率的特點(diǎn),可以用于監(jiān)測和成像。例如,通過毫米
2024-01-19 11:14:211117 。 一、原理及工作方式 毫米波雷達(dá):毫米波雷達(dá)利用射頻波段的電磁波,主要工作在毫米波頻段(30-300 GHz)。它通過傳輸和接收射頻信號(hào),利用回波的時(shí)間差來計(jì)算目標(biāo)物體的距離、速度和方位。毫米波雷達(dá)通常采用頻率調(diào)制連續(xù)波(FMCW)技術(shù)或脈沖多普勒技術(shù),可以實(shí)現(xiàn)高精度測距和目標(biāo)辨識(shí)。 超聲波
2024-01-17 09:25:551562 據(jù)麥姆斯咨詢報(bào)道,近期,總部位于美國加利福尼亞州的調(diào)頻連續(xù)波(FMCW)激光雷達(dá)廠商Aeva聲稱贏得了量產(chǎn)車輛的首次重大設(shè)計(jì)訂單(design win)。
2024-01-15 10:36:15246 結(jié)合現(xiàn)場實(shí)際情況,考慮到常規(guī)雷達(dá)無法克服高溫?cái)嚢琛?qiáng)腐蝕和大量泡沫對于測量產(chǎn)生的嚴(yán)重影響,且后期可能會(huì)帶來不菲的維護(hù)成本,客戶決定使用定華G80調(diào)頻雷達(dá)物位計(jì)解決現(xiàn)場液位測量難題。
2024-01-05 14:29:3892 
? ? ? ?雷達(dá)模組的應(yīng)用范圍非常廣泛,尤其在IoT環(huán)境搭建中起到重要作用。不同的雷達(dá)模組工作波段有很大區(qū)別,應(yīng)根據(jù)具體的應(yīng)用環(huán)境和所需的性能指標(biāo)來選擇合適的雷達(dá)模組。 安信可目前已推出Rd-01
2023-12-25 17:12:19193 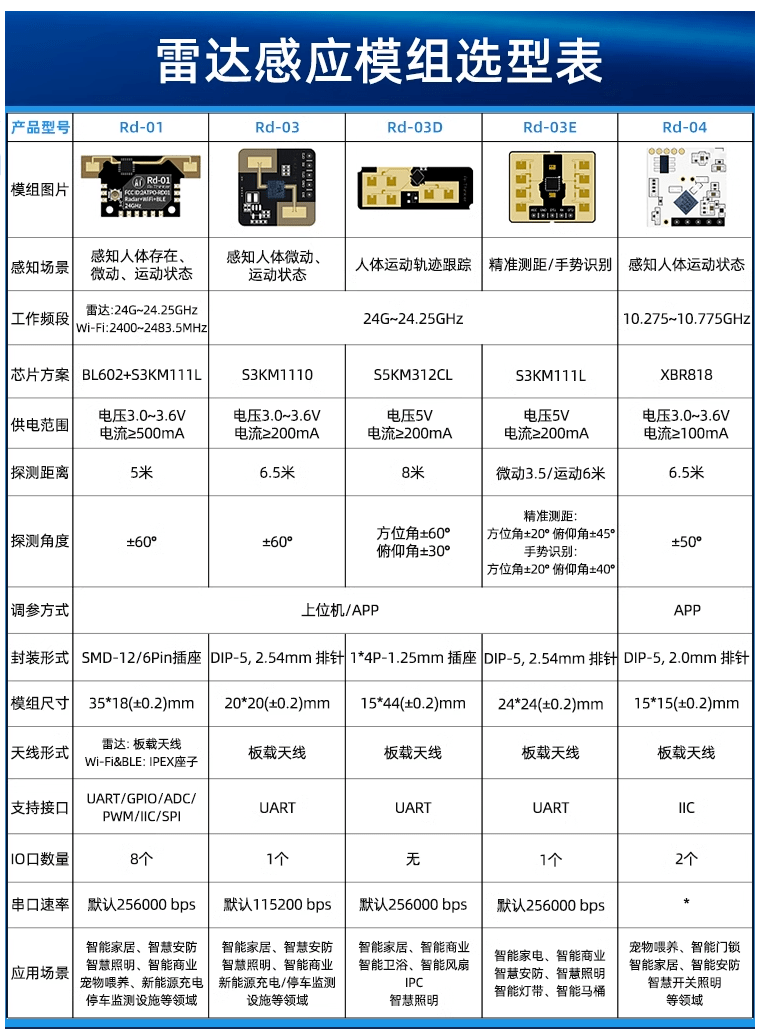
雷達(dá)模組的應(yīng)用范圍非常廣泛,尤其在IoT環(huán)境搭建中起到重要作用。不同的雷達(dá)模組工作波段有很大區(qū)別,應(yīng)根據(jù)具體的應(yīng)用環(huán)境和所需的性能指標(biāo)來選擇合適的雷達(dá)模組。
2023-12-22 18:13:30296 
類型,包括連續(xù)波雷達(dá)、脈沖雷達(dá)和多普勒雷達(dá)。 一、連續(xù)波雷達(dá) 連續(xù)波雷達(dá)是一種工作頻率連續(xù)、能夠持續(xù)輸出的雷達(dá)系統(tǒng)。它的工作原理是通過發(fā)射和接收連續(xù)性的電磁波,利用目標(biāo)返回的電磁波與發(fā)射信號(hào)進(jìn)行干涉與混頻,從而實(shí)
2023-12-21 11:38:331089 相似之處,但也存在一些顯著的差異。本文將對激光雷達(dá)和毫米波雷達(dá)進(jìn)行詳細(xì)比較與分析。 首先,我們來了解一下激光雷達(dá)和毫米波雷達(dá)的工作原理。 激光雷達(dá)利用激光束向目標(biāo)發(fā)送脈沖,并通過接收器接收目標(biāo)反射回來的光信號(hào),根據(jù)光信號(hào)的時(shí)間差和反
2023-12-19 09:54:33801 、機(jī)器人技術(shù)等領(lǐng)域。而激光雷達(dá)芯片則是實(shí)現(xiàn)這些功能的核心組件。 一、激光雷達(dá)芯片的種類 發(fā)射芯片:負(fù)責(zé)產(chǎn)生激光脈沖,通常采用高速脈沖調(diào)制器或直接調(diào)制器。 接收芯片:負(fù)責(zé)接收反射回來的光信號(hào),并進(jìn)行放大、濾波和數(shù)字化處理。 信號(hào)處理芯片:對接收到的數(shù)據(jù)進(jìn)
2023-12-13 15:30:32342 SiLC Eyeonic視覺傳感器點(diǎn)云圖,展示了超過2公里的探測范圍。SiLC基于調(diào)頻連續(xù)波(FMCW)激光雷達(dá)(LiDAR)系統(tǒng)的探測距離和精度性能,非常適合需要先進(jìn)預(yù)警和詳細(xì)環(huán)境感知的應(yīng)用,例如周界安全和無人機(jī)探測等。
2023-12-13 14:35:11191 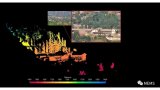
微波雷達(dá)感應(yīng)與紅外感應(yīng)的區(qū)別? 微波雷達(dá)感應(yīng)和紅外感應(yīng)是目前應(yīng)用廣泛的兩種感應(yīng)技術(shù),它們在原理、適用場景、優(yōu)缺點(diǎn)等方面存在一定的差異。下面將從多個(gè)方面進(jìn)行詳盡、詳實(shí)、細(xì)致地介紹微波雷達(dá)感應(yīng)和紅外
2023-12-12 15:05:01972 毫米波雷達(dá)物位計(jì)與傳統(tǒng)雷達(dá)液位計(jì)區(qū)別在哪里呢? 毫米波雷達(dá)物位計(jì)和傳統(tǒng)雷達(dá)液位計(jì)是兩種測量物位的技術(shù),它們在原理、應(yīng)用、測量范圍、精度等方面存在一些區(qū)別。 首先,毫米波雷達(dá)物位計(jì)是一種使用微波信號(hào)
2023-12-12 15:04:56377 5.8G、10G與24G雷達(dá)模塊的區(qū)別和應(yīng)用? 雷達(dá)作為一種主要的感知技術(shù),廣泛應(yīng)用于無人駕駛、智能交通、軍事防御等領(lǐng)域。隨著科技的進(jìn)步,在雷達(dá)技術(shù)中出現(xiàn)了不同頻段的雷達(dá)模塊,其中5.8G、10G
2023-12-12 14:37:541301 單線激光雷達(dá)和多線激光雷達(dá)區(qū)別? 單線激光雷達(dá)和多線激光雷達(dá)是兩種常用的激光雷達(dá)技術(shù)。它們在激光的發(fā)射方式、數(shù)據(jù)采集、成像分辨率和應(yīng)用場景等方面存在著很大的區(qū)別。 首先,單線激光雷達(dá)是指激光雷達(dá)
2023-12-07 15:48:331843 多個(gè)雷達(dá)可以構(gòu)成雷達(dá)網(wǎng)實(shí)現(xiàn)對地面目標(biāo)的連續(xù)覆蓋。常規(guī)飛機(jī)無法在未被探測到的情況下穿透雷達(dá)網(wǎng)。
2023-12-06 11:29:22248 
呢?對于雷達(dá)感應(yīng)的優(yōu)勢又在哪里?01感應(yīng)原理雷達(dá)感應(yīng)利用調(diào)頻連續(xù)波(FMCW)原理,智能檢測周圍環(huán)境,自動(dòng)調(diào)整工作狀態(tài)。當(dāng)移動(dòng)物體進(jìn)入感應(yīng)范圍,燈亮;當(dāng)移動(dòng)物體離開后
2023-12-02 08:23:00628 
電子發(fā)燒友網(wǎng)站提供《脈沖雷達(dá)用GaN MMIC功率放大器的電源管理說明.pdf》資料免費(fèi)下載
2023-11-24 11:08:21 0
0 駐車雷達(dá)主要通過使用超聲波或雷達(dá)技術(shù)來檢測車輛周圍的障礙物,從而提供環(huán)境感知和距離提示。它可以測量與障礙物的距離,并通過聲音或視覺警告向駕駛員傳達(dá)障礙物的存在或接近。駐車雷達(dá)在車輛停車時(shí)可以有效地檢測周圍的障礙物,幫助駕駛員避免碰撞。
2023-11-23 16:55:30456 汽車超聲波雷達(dá)通常用于倒車輔助系統(tǒng),可以檢測到車輛周圍的障礙物和障礙物的距離。當(dāng)車輛靠近障礙物時(shí),雷達(dá)會(huì)發(fā)出警告信號(hào)(如聲音或視覺警告),幫助駕駛員避免碰撞。
2023-11-23 16:52:444002 激光雷達(dá)和毫米波雷達(dá)的區(qū)別 哪個(gè)才是自動(dòng)駕駛感知的最優(yōu)選擇? 激光雷達(dá)和毫米波雷達(dá)是自動(dòng)駕駛車輛感知系統(tǒng)中常見的傳感器技術(shù),它們在實(shí)現(xiàn)自動(dòng)駕駛的過程中起著關(guān)鍵作用。本文將詳細(xì)探討激光雷達(dá)和毫米波雷達(dá)
2023-11-22 17:41:083820 在單脈沖跟蹤體制未獲使用前,圓錐掃描體制的雷達(dá)很難對付敵方施放的角度欺騙干擾;沒有相參體制的脈沖多普勒雷達(dá),就無法對付借著強(qiáng)大的地雜波掩護(hù)的低空入侵的飛機(jī)和導(dǎo)彈
2023-11-21 16:02:47423 
1、測量原理 雷達(dá)液位計(jì)于20世紀(jì)60年代問世,通常采用調(diào)頻雷達(dá)原理,利用同步調(diào)頻脈沖技術(shù),將微波發(fā)射器和接收器安裝在液面上方,向液面發(fā)射經(jīng)過頻率調(diào)制的微波信號(hào)。發(fā)射和接收到的微波信號(hào)存在時(shí)間延遲
2023-11-21 09:15:51854 結(jié)合常用的車載調(diào)頻連續(xù)波(FMCW)雷達(dá)和擴(kuò)頻通信技術(shù),針對通信與目標(biāo)探測相結(jié)合的綜合波形設(shè)計(jì)、硬件實(shí)現(xiàn)等問題,研究了基于直接調(diào)制的調(diào)頻連續(xù)波(DM-FMCW)的一體化系統(tǒng),通過仿真結(jié)合理論推導(dǎo)驗(yàn)證
2023-11-17 09:45:03351 
氣象衛(wèi)星等脈沖雷達(dá)應(yīng)用領(lǐng)域。具備3級增益值;CMPA901A020高性能放大器具備>30dB的大信號(hào)增益值;可能會(huì)減少傳輸數(shù)據(jù)BOM數(shù)值;>50%的效率可實(shí)現(xiàn)相對較低的系統(tǒng)直流
2023-11-14 09:37:55
呢?對于雷達(dá)感應(yīng)的優(yōu)勢又在哪里? 01感應(yīng)原理 雷達(dá)感應(yīng)利用調(diào)頻連續(xù)波(FMCW)原理,智能檢測周圍環(huán)境,自動(dòng)調(diào)整工作狀態(tài)。當(dāng)移動(dòng)物體進(jìn)入感應(yīng)范圍,燈亮;當(dāng)移動(dòng)物體離開后延時(shí)設(shè)定范圍的時(shí)間后,燈滅或者燈微亮。 而紅外感應(yīng)是
2023-11-13 14:52:541341 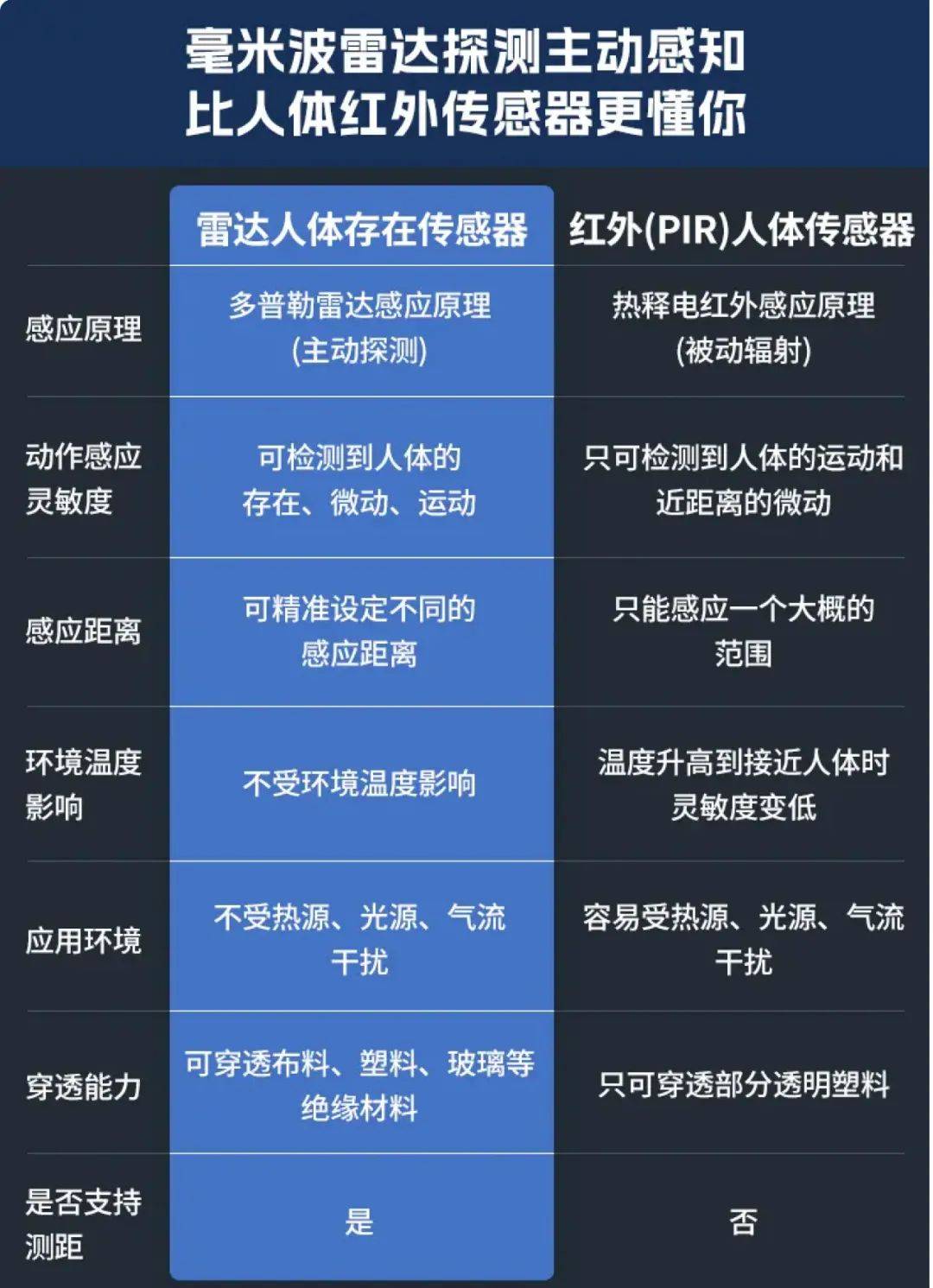
電磁雷達(dá)使用電磁波進(jìn)行探測和測量。它通過發(fā)射無線電頻率的電磁波,并接收其反射回來的信號(hào)來計(jì)算目標(biāo)的距離、速度和角度等信息。激光雷達(dá)則使用激光束進(jìn)行探測和測量。
2023-10-30 17:43:412290 雷達(dá),可分為聚焦型和非聚焦型兩類。與其它大多數(shù)雷達(dá)一樣,合成孔徑雷達(dá)通過發(fā)射電磁脈沖和接收目標(biāo)回波之間的時(shí)間差測定距離,其分辨率與脈沖寬度或脈沖持續(xù)時(shí)間有關(guān),脈寬越窄分辨率越高。
2023-10-23 09:51:26697 
不同雷達(dá)的電磁信號(hào)調(diào)制方式 雷達(dá)是一種通過發(fā)送電磁波并接收其反射信號(hào)來探測物體的儀器。根據(jù)雷達(dá)的電磁信號(hào)調(diào)制方式不同,可以分為:脈沖雷達(dá)、連續(xù)波雷達(dá)和調(diào)頻雷達(dá)。本文將詳細(xì)介紹這三種雷達(dá)的特點(diǎn)
2023-10-20 14:21:42733 什么是
脈沖變壓器?
脈沖變壓器和
普通變壓器的
區(qū)別有哪些?
脈沖變壓器是一種特殊的變壓器,它專門用于處理
脈沖信號(hào)。它與
普通變壓器的
區(qū)別在于,
脈沖變壓器的設(shè)計(jì)和結(jié)構(gòu)比
普通變壓器更為復(fù)雜,因?yàn)樗枰幚砀?/div>
2023-10-18 15:22:441500 ,具有先進(jìn)測量技術(shù)的雷達(dá)類物位計(jì)發(fā)展迅速,由于其適應(yīng)復(fù)雜工況能力強(qiáng),使用維護(hù)方便等原因,深受廣大用戶歡迎。76GHz~81GHz調(diào)頻連續(xù)波雷達(dá)物位計(jì)由于其天線尺寸小、測量精度高、發(fā)射角小等優(yōu)點(diǎn),近年來市場占有率快速提高,已
2023-10-08 15:02:25289 脈沖信號(hào)發(fā)生器德思特PG1000系列在雷達(dá)系統(tǒng)開發(fā)過程中的應(yīng)用。一次脈沖雷達(dá)主雷達(dá)產(chǎn)生一個(gè)照射目標(biāo)物的信號(hào),并接受其回波。根據(jù)不同的調(diào)制方式(模擬調(diào)制/數(shù)字調(diào)制)
2023-10-07 14:32:51322 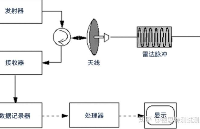
雷達(dá)料位計(jì)主要由發(fā)射和接收裝置、信號(hào)處理器、操作面板、顯示器、天線、故障報(bào)警裝置等 6部分組成。 雷達(dá)料位計(jì)利用雷達(dá)波的特性來檢測料位,其基本工作原理為發(fā)射—反射—接收。雷達(dá)料位計(jì)的天線以波束的形式
2023-09-27 07:19:31598 單脈沖和連續(xù)的時(shí)鐘信號(hào)有什么區(qū)別?? 時(shí)鐘信號(hào)在數(shù)字電路以及分布式計(jì)算系統(tǒng)等工業(yè)與科技領(lǐng)域中有廣泛應(yīng)用。根據(jù)應(yīng)用的不同,時(shí)鐘信號(hào)可以被分為單脈沖和連續(xù)的兩種類型。這兩種時(shí)鐘信號(hào)有很多區(qū)別
2023-09-15 16:28:23996 24G毫米波雷達(dá)是一款利用高頻微波多普勒(Doppler)效應(yīng)(用于精確測量速度) 和調(diào)頻連續(xù)(FMCW)波(用于精確測量距離)高科技智能交通類產(chǎn)品。
2023-09-15 16:18:021370 
毫米波雷達(dá)的優(yōu)點(diǎn)是角分辨率高、頻帶寬因而有利于采用脈沖壓縮技術(shù)、多普勒頗移大和系統(tǒng)的體積小。目前筆者接觸到的有24G毫米波雷達(dá)和77G毫米波雷達(dá)。
2023-09-15 16:17:121383 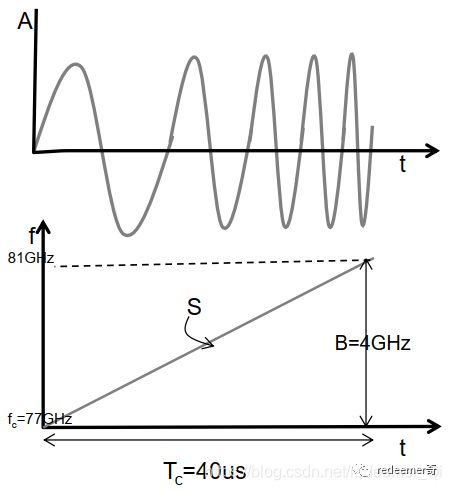
。實(shí)現(xiàn)振動(dòng)試驗(yàn)需要的所有功能:正弦波、調(diào)頻、掃頻、可程序、倍頻、對數(shù)、大加速度,調(diào)幅,時(shí)間控制,通過升級可實(shí)現(xiàn)全功能電腦控制,簡易定加速度/定振幅。設(shè)備通過連續(xù)無故障運(yùn)轉(zhuǎn)3個(gè)月測試,性能穩(wěn)定,質(zhì)量
2023-09-11 14:06:53
雜波抑制-MTI和脈沖多普勒處理雜波抑制-MTI和脈沖多普勒處理雜波抑制-MTI和脈沖多普勒處理
2023-09-08 10:19:51673 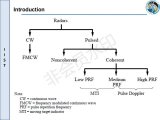
任何雷達(dá)接收機(jī)接收到的回波信號(hào)都包含目標(biāo)回波和背景雜波。要在包含背景雜波的環(huán)境中探測目標(biāo),雷達(dá)系統(tǒng)必須具有遠(yuǎn)距離和寬范圍的分辨能力。過去一般使用短脈沖波形和寬帶調(diào)頻脈沖來實(shí)現(xiàn)這一目標(biāo)。不過,這種
2023-09-06 09:44:30360 
,比如交警的測速雷達(dá)。調(diào)制連續(xù)波有偽碼連續(xù)波和調(diào)頻連續(xù)被兩種,可以測速也可以測距,由于收發(fā)隔離度的限制,常見于低功率的雷達(dá)應(yīng)用,比如艦船的導(dǎo)航雷達(dá)。脈沖雷達(dá)是雷達(dá)的一
2023-08-26 08:30:03393 
,比如交警的測速雷達(dá)。調(diào)制連續(xù)波有偽碼連續(xù)波和調(diào)頻連續(xù)被兩種,可以測速也可以測距,由于收發(fā)隔離度的限制,常見于低功率的雷達(dá)應(yīng)用,比如艦船的導(dǎo)航雷達(dá)。 脈沖雷達(dá)是雷達(dá)的一種。能夠輻射較短的高頻脈沖,然后天線轉(zhuǎn)接到接收
2023-08-25 09:59:58558 
什么是固態(tài)雷達(dá)?固態(tài)激光雷達(dá)原理 固態(tài)雷達(dá)是一種采用固態(tài)材料發(fā)射和接收雷達(dá)信號(hào)的雷達(dá)系統(tǒng)。不同于傳統(tǒng)雷達(dá)采用開關(guān)型微波管的方式,固態(tài)雷達(dá)利用半導(dǎo)體元器件實(shí)現(xiàn)信號(hào)發(fā)射和接收。隨著半導(dǎo)體技術(shù)的發(fā)展,固態(tài)
2023-08-22 16:45:272681 一個(gè)RF感應(yīng)雷達(dá)模塊電路,原來需要接主機(jī)軟件才能使用雷達(dá)感應(yīng)功能,可否單獨(dú)使用此模塊、紅色框電源和信號(hào)接口,黃色框是負(fù)載,綠色發(fā)射模塊,上電紅框內(nèi)第1/2線有12V電壓、4/6電壓輸出很低、負(fù)載正負(fù)無電壓。如何不通過原主機(jī)解決信號(hào)接入輸出問題、還望各位師傅給講解一下。謝謝
2023-08-20 00:57:09
要從距離分辨力和方位分辨力兩個(gè)角度來說明。距離分辨力脈沖寬度越窄,距離上能達(dá)到的分辨力就越高( <span class="MathJax_SVG"
2023-08-16 09:42:23
5.8G雷達(dá)模塊,人體存在感應(yīng)雷達(dá),微波雷達(dá)感應(yīng)技術(shù)應(yīng)用
2023-08-10 14:38:031291 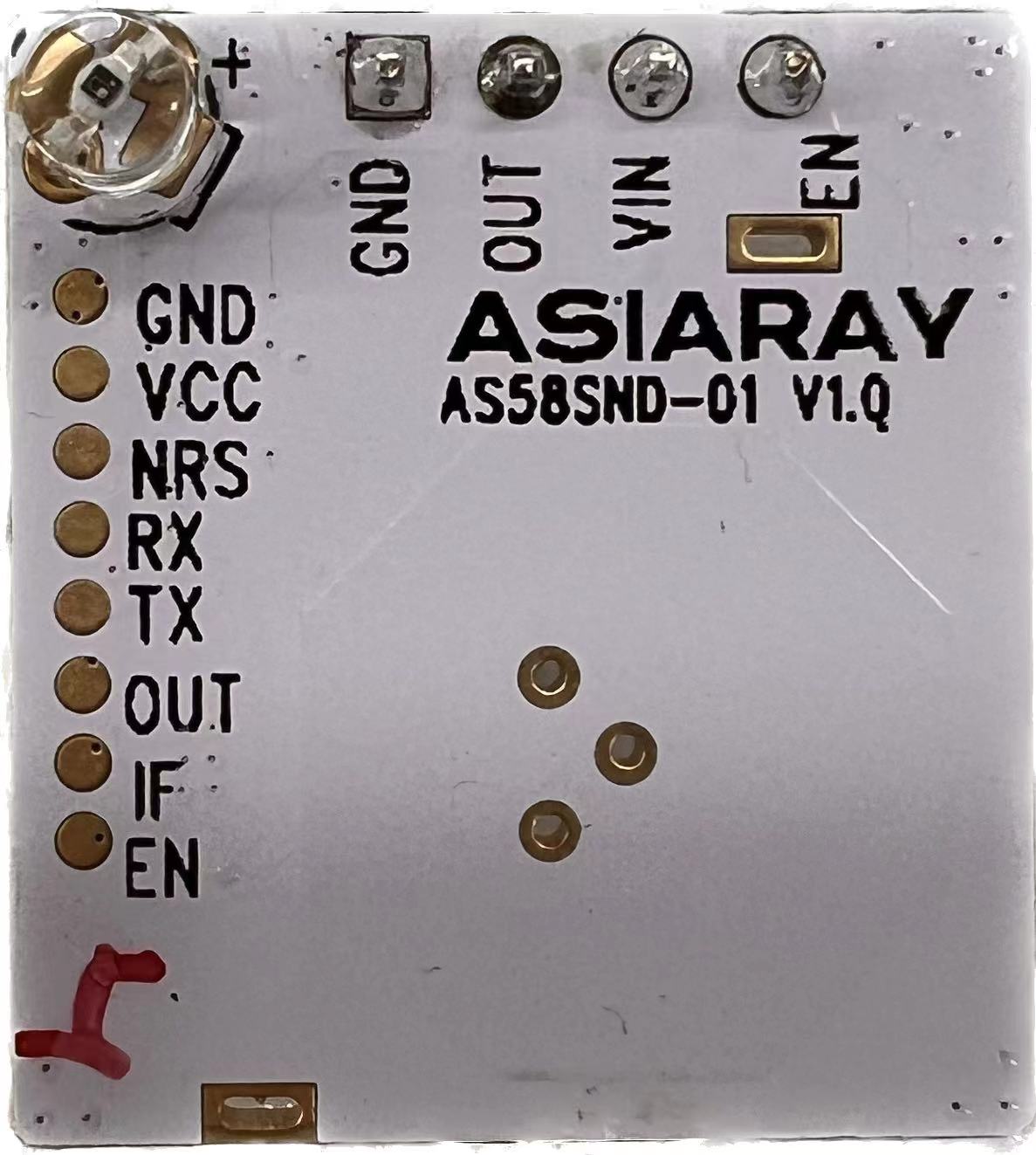
4D毫米波雷達(dá)與傳統(tǒng)雷達(dá)不同,為了解決傳統(tǒng)毫米波雷達(dá)角分辨率低、點(diǎn)云密度低的問題,當(dāng)下出現(xiàn)了四種4D毫米波雷達(dá)解決方案
2023-07-07 14:15:02618 
雷達(dá)脈沖電源模塊115、130、145瓦,3.1-3.5千兆赫,100毫秒脈沖
2023-07-05 15:13:251 液位計(jì)作為大型儲(chǔ)罐液位測量方案。對于雷達(dá)液位計(jì)的測量方式,目前主要有調(diào)頻連續(xù)波(FMCW)和脈沖法兩種技術(shù)。
2023-07-04 11:10:13344 根據(jù)雷達(dá)波工作原理,嘉可儀表JK型雷達(dá)液位計(jì)采用了發(fā)射雷達(dá)波—反射雷達(dá)波—接收雷達(dá)波的工作模式。在工作時(shí)雷達(dá)液位計(jì)的發(fā)射端發(fā)出調(diào)頻連續(xù)波信號(hào),雷達(dá)波信號(hào)在觸碰到液面后反射回來并被雷達(dá)波接收端接
2023-07-03 10:50:03186 傳統(tǒng)使用基于調(diào)頻連續(xù)波(FMCW)技術(shù)的模擬雷達(dá)在L2或者L2+級別智能駕駛中存在明顯不足。首先是分辨率低,對目標(biāo)物體的細(xì)節(jié)獲取不足,難以形成目標(biāo)物的輪廓信息。
2023-06-29 10:21:54317 
成像雷達(dá)系統(tǒng)通常發(fā)射平面極化雷達(dá)脈沖。與這種脈沖相關(guān)的電場在垂直于波傳播方向的單一平面內(nèi)振蕩。最常見的極化模式是發(fā)射和接收水平極化信號(hào)(指定為HH模式,第一個(gè)字母表示發(fā)射的極化)。 有些系統(tǒng)發(fā)射
2023-06-27 11:25:402046 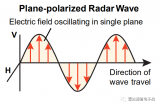
雷達(dá)液位計(jì)發(fā)射能量很低的短的微波脈沖通過天線系統(tǒng)發(fā)射并接收。雷達(dá)波以光速運(yùn)行,運(yùn)行時(shí)間可以通過電子部件被轉(zhuǎn)換成物位信號(hào)。一種特殊的時(shí)間延伸方法可以確保短時(shí)間內(nèi)穩(wěn)定和精確的測量。 雷達(dá)液位計(jì)即使工況
2023-06-14 14:47:53304 
本文介紹了 24 GHz ISM 頻段內(nèi)調(diào)頻連續(xù)波 (FMCW) 雷達(dá)的生成。這包括此類雷達(dá)系統(tǒng)所需的主要構(gòu)建模塊,例如斜坡生成、發(fā)射和接收級、下變頻和采樣。
2023-06-13 11:08:021731 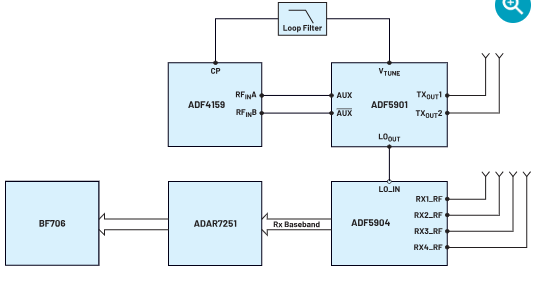
產(chǎn)品概述: 毫米波雷達(dá)是一種用于測量距離、速度和位置的高頻無源
2023-06-09 15:52:34
連續(xù)波雷達(dá)發(fā)送的是一個(gè)連續(xù)的無線電頻率信號(hào),通過接收目標(biāo)反射回來的回波信號(hào)來檢測目標(biāo)并計(jì)算距離。連續(xù)波雷達(dá)的優(yōu)點(diǎn)是信號(hào)處理簡單、便于制造和使用,但其缺點(diǎn)是抗干擾性能較差,難以精確測量高速目標(biāo)的速度等問題。常見的連續(xù)波雷達(dá)包括移動(dòng)雷達(dá)、陣列雷達(dá)、固定波束雷達(dá)等。
2023-06-02 18:00:316220 濟(jì)南祥控自動(dòng)化研制的XKCON祥控雷達(dá)物位計(jì)采用高達(dá)26GHz的發(fā)射頻率進(jìn)行物料位檢測,因此也被稱為“脈沖雷達(dá)物位計(jì)”、“脈沖雷達(dá)料位計(jì)”或
2023-05-31 17:17:24
本例展示了如何模擬單站脈沖雷達(dá)的接收信號(hào)以估計(jì)目標(biāo)距離。單站脈沖雷達(dá)的發(fā)射器與接收器物理位置上可以認(rèn)為是同一個(gè)點(diǎn)。
2023-05-29 17:29:091226 
這些優(yōu)勢是目前取代雷達(dá)常用的高功率、大帶寬行波管(TWT)放大器的趨勢背后的原因。GaN HEMT消除了由于陰極耗盡而導(dǎo)致的TWT放大器固有的使用壽命相對較短的限制,長時(shí)間存儲(chǔ)后開啟時(shí)TWT損壞的風(fēng)險(xiǎn),以及由于管中的所有組件都是潛在的單點(diǎn)硬故障,因此平均故障間隔時(shí)間(MTBF)較低。
2023-05-24 09:37:07895 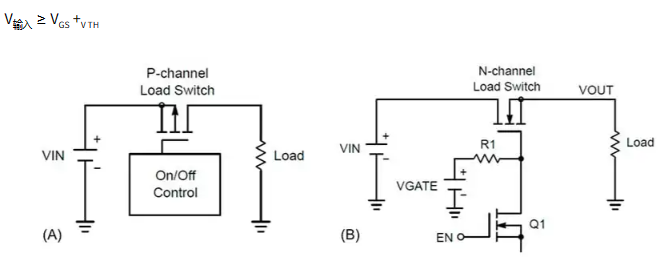
本文 首發(fā)于公眾號(hào) 【調(diào)皮連續(xù)波】 ,其他平臺(tái)為自動(dòng)同步,內(nèi)容若不全或亂碼,請前往公眾號(hào)閱讀。保持關(guān)注調(diào)皮哥,和1.6W雷達(dá)er一起學(xué)習(xí)雷達(dá)技術(shù)! ? 【正文】 編輯|雷達(dá)小助理? 審核|調(diào)皮
2023-05-21 08:43:433476 
產(chǎn)品概述:WTR-812基于毫米波的線性調(diào)頻脈沖雷達(dá)芯片,綜合FMCW、MIMO、DBF等技術(shù),通過對監(jiān)測區(qū)域內(nèi)移動(dòng)目標(biāo)人員所反射電磁波的計(jì)算分析,判斷目標(biāo)人員是否進(jìn)入所設(shè)定的監(jiān)測區(qū)域內(nèi),統(tǒng)計(jì)并輸出各區(qū)域內(nèi)監(jiān)測到的目標(biāo)人員數(shù)量,并獲取目標(biāo)人員當(dāng)前的速度、位置和方向,實(shí)現(xiàn)軌跡跟蹤。(詳情見下載資料)
2023-05-19 10:38:302 。 產(chǎn)品采用脈沖相參雷達(dá)(PCR)技術(shù),用60G毫米雷達(dá)波作為載波信號(hào),通過復(fù)雜的信號(hào)識(shí)別算法實(shí)現(xiàn)了毫米級的測量精度,充分的消浪濾波設(shè)計(jì),使測量結(jié)果更加精確穩(wěn)定,相比傳統(tǒng)脈沖雷達(dá)液位計(jì)具有更高的測量精度、更低的功耗以
2023-05-18 14:34:10242 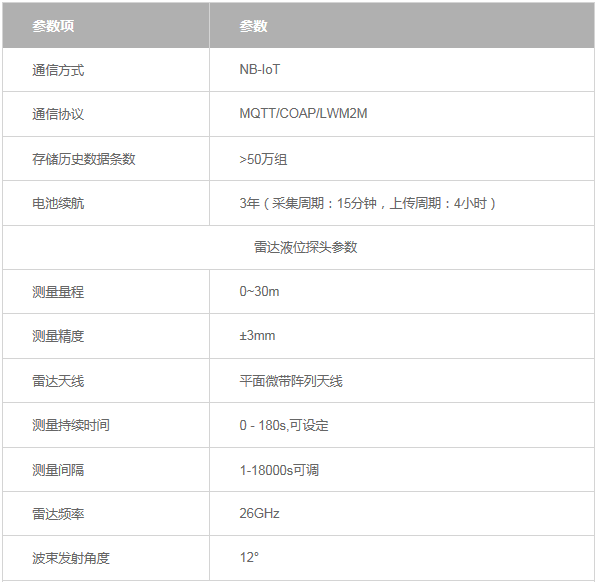
本文 首發(fā)于公眾號(hào) 【調(diào)皮連續(xù)波】 ,其他平臺(tái)為自動(dòng)同步,內(nèi)容若不全或亂碼,請前往公眾號(hào)閱讀。保持關(guān)注調(diào)皮哥,和1.5W雷達(dá)er一起學(xué)習(xí)雷達(dá)技術(shù)! ? 2023年度會(huì)員內(nèi)容更新公告(05.07
2023-05-08 14:40:522346 
本文首發(fā)于公眾號(hào)【調(diào)皮連續(xù)波】,其他平臺(tái)為自動(dòng)同步,內(nèi)容若不全或亂碼,請前往公眾號(hào)閱讀。保持關(guān)注調(diào)皮哥,和1.4W雷達(dá)er一起學(xué)習(xí)雷達(dá)技術(shù)! ? 2023年度會(huì)員內(nèi)容更新公告(04.10) 序號(hào)
2023-05-08 10:45:161028 
- 產(chǎn)品概述 - WTR-812基于毫米波的線性調(diào)頻脈沖雷達(dá)芯片,綜合FMCW、MIMO、DBF等技術(shù),通過對監(jiān)測區(qū)域內(nèi)移動(dòng)目標(biāo)人員所反射電磁波的計(jì)算分析,判斷目標(biāo)人員是否進(jìn)入
2023-05-06 11:10:00
因隱私問題衍生而來的激光雷達(dá)和毫米波雷達(dá)等。今天測評的主角就是最近風(fēng)聲比較大的性價(jià)比之王——毫米波雷達(dá),測試產(chǎn)品是巍泰技術(shù)的人員感知雷達(dá)WTR-812,這家公司在民用雷達(dá)領(lǐng)域耕耘多年,雷達(dá)在人數(shù)統(tǒng)計(jì)
2023-05-05 13:45:19
用于測距的雷達(dá)系統(tǒng)通常分為脈沖雷達(dá)和調(diào)頻連續(xù)波雷達(dá)。脈沖雷達(dá)技術(shù)借助于脈沖壓縮技術(shù)來提高分辨率,調(diào)頻連續(xù)波雷達(dá)技術(shù)是使發(fā)射電波的頻率連續(xù)快速地變化,利用瞬時(shí)的發(fā)射頻率與回波頻率之差來計(jì)算距離,但都是
2023-05-02 08:17:10611 最大無模糊距離:雷達(dá)能夠檢測和顯示的最大無模糊作用距離,指的是目標(biāo)回波在下一個(gè)脈沖發(fā)射前返回雷達(dá)的最長傳輸時(shí)間對應(yīng)的距離。
2023-04-26 11:52:011119 
Rd-01模組的雷達(dá)方案是基于FMCW調(diào)頻連續(xù)波雷達(dá)技術(shù)的集成單片單波傳感器SOC,工作在24GHz(K波段),既可測距又可測速,并且在距離測試的優(yōu)勢更明顯。
2023-04-23 09:09:16736 
對于信號(hào)處理來說,雷達(dá)和通信一直是一體兩面,從MIMO通信到MIMO雷達(dá),從OFDM通信到Multicarrier雷達(dá),很多通信和雷達(dá)領(lǐng)域的前沿技術(shù)都存在事實(shí)上的相互影響。本篇文章將會(huì)介紹劉凡博士
2023-04-19 17:43:421605 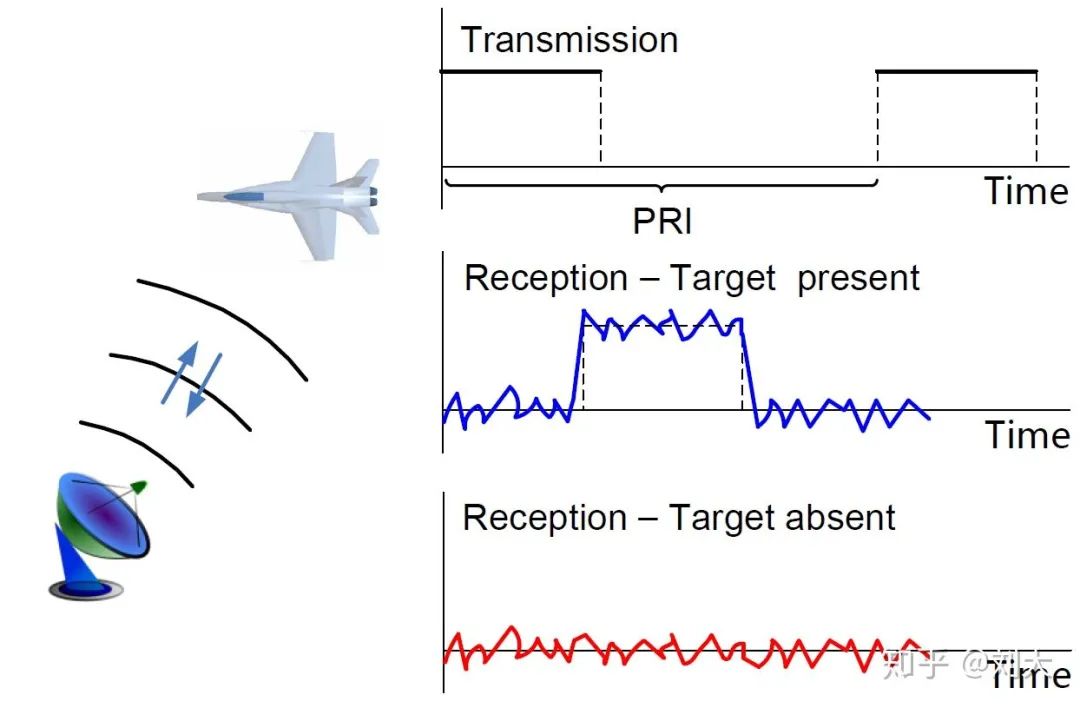
的。毫米波雷達(dá)基本工作原理示意圖4:毫米波雷達(dá)的工作體制1)工作體制 :根據(jù)輻射電磁波方式不同,毫米波雷達(dá)主要有脈沖體制以及連續(xù)波體制兩種工作體制。其中連續(xù)波又可以分為FSK(頻移鍵控)、PSK(相移鍵控
2023-04-18 11:42:23
從某品牌10GHz FMCW雷達(dá)物位計(jì)的全生命周期來看,首先,F(xiàn)MCW雷達(dá)物位計(jì)的誕生源于新技術(shù)的應(yīng)用。當(dāng)脈沖雷達(dá)不能較好滿足測控要求時(shí),F(xiàn)MCW雷達(dá)物位計(jì)的出現(xiàn)具備明顯的后發(fā)優(yōu)勢,這使得產(chǎn)品
2023-04-17 09:45:00349 最大無模糊距離:雷達(dá)能夠檢測和顯示的最大無模糊作用距離,指的是目標(biāo)回波在下一個(gè)脈沖發(fā)射前返回雷達(dá)的最長傳輸時(shí)間對應(yīng)的距離。
2023-04-17 09:28:231949 1、第一代基礎(chǔ)型FMCW雷達(dá)物位計(jì)? 最早的調(diào)頻連續(xù)波雷達(dá)物位計(jì)主頻頻率為8.5~9.9GHz,掃頻帶寬為1GHz。由于功耗較大,基本上采用四線制轉(zhuǎn)換器。通信方式僅有HART通訊,信號(hào)輸出方
2023-04-13 12:01:12638 。 產(chǎn)品采用脈沖相參雷達(dá)(PCR)技術(shù),用60G毫米雷達(dá)波作為載波信號(hào),通過復(fù)雜的信號(hào)識(shí)別算法實(shí)現(xiàn)了毫米級的測量精度,充分的消浪濾波設(shè)計(jì),使測量結(jié)果更加精確穩(wěn)定,相比傳統(tǒng)脈沖雷達(dá)液位計(jì)具有更高的測量精度、更低的功耗以
2023-04-13 10:05:03318 
脈沖壓縮雷達(dá)最常見的調(diào)制信號(hào)是線性調(diào)頻信號(hào),接收時(shí)采用匹配濾波器壓縮脈沖。脈沖壓縮雷達(dá)能同時(shí)提高雷達(dá)的作用距離和距離分辨率。
2023-04-10 11:32:50879 雷達(dá)按照發(fā)射信號(hào)的種類可分成脈沖雷達(dá)和連續(xù)波雷達(dá),常規(guī)脈沖雷達(dá)發(fā)射周期性的調(diào)制脈沖信號(hào),而連續(xù)波雷達(dá)發(fā)射的是連續(xù)波信號(hào)。通常,脈沖雷達(dá)具有較高的峰值功率和較小的占空比,而連續(xù)波雷達(dá)則具有100%的占空比和較低的功率。
2023-04-04 10:01:512806 單脈沖雷達(dá)(monopulse radar)是一種精密跟蹤雷達(dá),其設(shè)計(jì)的初衷是為了克服圓錐掃描和順序波束轉(zhuǎn)換跟蹤技術(shù)對回波幅度起伏和幅度干擾敏感,從而造成錯(cuò)誤的目標(biāo)角度跟蹤誤差的問題。
2023-03-30 09:42:203321 相參雷達(dá)(PCR)技術(shù),用60G毫米雷達(dá)波作為載波信號(hào),通過復(fù)雜的信號(hào)識(shí)別算法實(shí)現(xiàn)了毫米級的測量精度,充分的消浪濾波設(shè)計(jì),使測量結(jié)果更加精確穩(wěn)定,相比傳統(tǒng)脈沖雷達(dá)液位計(jì)具有更高的測量精度、更低的功耗以及超小的體積;測量時(shí)
2023-03-28 11:14:44449 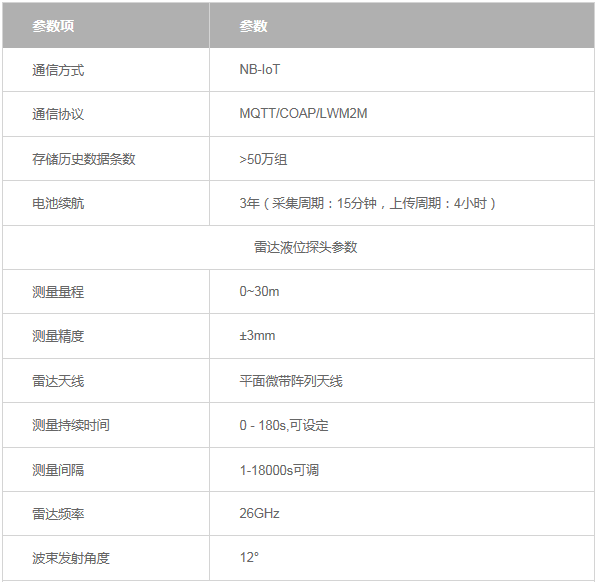
AESA和PESA雷達(dá)都是(通常)脈沖雷達(dá)。AESA和現(xiàn)代PESA都具有頻率捷變能力,并且可以在不同頻率上跳頻,兩者都可以工作于具有窄帶或?qū)拵J剑⑶叶伎梢杂糜贓CM、被動(dòng)掃描、波束成形等。主要區(qū)別在于大功率RF信號(hào)的來源。
2023-03-27 09:13:444507 我想按照這些步驟安裝 S32DS 的雷達(dá)擴(kuò)展包但失敗 了 。雷達(dá)擴(kuò)展包: [/td]1.1.0_D2105[td]適用于 S32 Design Studio 3.4 的 S32R45 雷達(dá)擴(kuò)展包 1.1.0S32DS:V3.5
2023-03-24 08:55:00
 電子發(fā)燒友App
電子發(fā)燒友App

















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論