 電子發燒友App
電子發燒友App


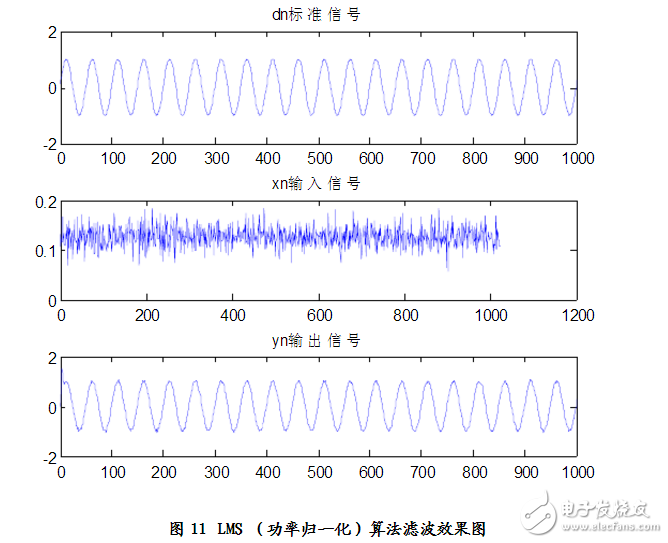
方案3——功率歸一化LMS算法的實現
功率歸一化,與歸一化算法一樣,也只是在對u(k)的取值方面有一定的差別。功率歸一化中定義u(k)=a/g2x(k),其中g2x表示x(k)的方差。由a/g2x(k)=dg2x(k-1)+e2(k)可知,d《(0,1),0《a《2/m,其中M為濾波器的階數。同時也為了方便起見,我們暫且定義a=1/M,d=0.5。
功率歸一化LMS算法編程為:
for n=2:M
xn=sin(4*pi*n/100)+vn;
yn(n)=w1(n)*xn(n)+w2(n)*xn(n-1);
e(n)=xn(n)-yn(n);
gx2(n)=d*gx2(n-1)+e(n)*e(n); u(n)=a/(gx2(n));
w1(n+1)=w1(n)+2*u(n)*e(n)*xn(n);
w2(n+1)=w2(n)+2*u(n)*e(n)*xn(n-1);
end
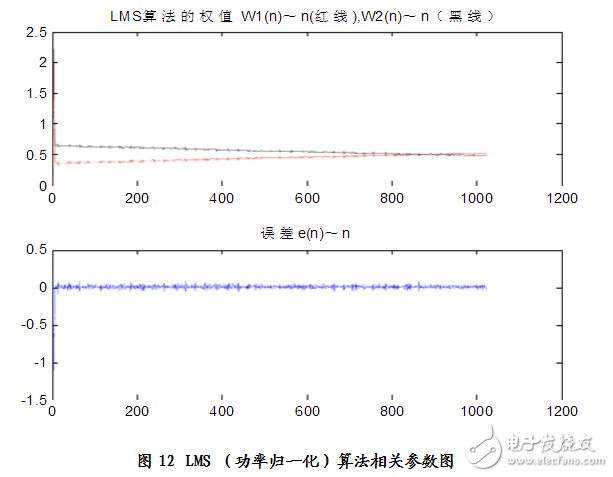
仿真結果:見圖11、圖12
分析得:n=8
Elapsed time is 0.078000 seconds.
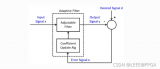
LMS(least mean square)自適應濾波算法matlab實現
以下是matlab幫助文檔中lms示例程序,應用在一個系統辨識的例子上。整個濾波的過程就兩行,用紅色標識。
x = randn(1,500); % Input to the filter
b = fir1(31,0.5); % FIR system to be identified
n = 0.1*randn(1,500); % Observation noise signal
d = filter(b,1,x)+n; % Desired signal
mu = 0.008; % LMS step size.
ha = adaptfilt.lms(32,mu);
[y,e] = filter(ha,x,d);
subplot(2,1,1); plot(1:500,[d;y;e]);
title(‘System Identification of an FIR Filter’);
legend(‘Desired’,‘Output’,‘Error’);
xlabel(‘Time Index’); ylabel(‘Signal Value’);
subplot(2,1,2); stem([b.‘,ha.coefficients.’]);
legend(‘Actual’,‘Estimated’);
xlabel(‘Coefficient #’); ylabel(‘Coefficient Value’);
grid on;
這實在看不出什么名堂,就學習目的而言,遠不如自己寫一個出來。整個濾波的過程用紅色標識。
%% System Identification (SID)
% This demonstration illustrates the application of LMS adaptive filters to
% system identification (SID)。
%
% Author(s): X. Gumdy
% Copyright 2008 The Funtech, Inc.
%% 信號產生
clear all;
N = 1000 ;
x = 10 * randn(N,1); % 輸入信號
b = fir1(31,0.5); % 待辨識系d
n = randn(N,1);
d = filter(b,1,x)+n; % 待辨識系統的加噪聲輸出
%% LMS 算法手工實現
sysorder = 32;
maxmu = 1 / (x‘*x / N * sysorder);% 通過估計tr(R)來計算mu的最大值
mu = maxmu / 10;
w = zeros ( sysorder , 1 ) ;
for n = sysorder : N
u = x(n-sysorder+1:n) ;
y(n)= w’ * u;
e(n) = d(n) - y(n) ;
w = w + mu * u * e(n) ;
end
y = y‘;
e = e’;
%% 畫圖
figure(1);
subplot(2,1,1); plot((1:N)‘,[d,y,e]);
title(’System Identification of an FIR Filter‘);
legend(’Desired‘,’Output‘,’Error‘);
xlabel(’Time Index‘); ylabel(’Signal Value‘);
subplot(2,1,2); stem([b’, w]);
legend(‘Actual’,‘Estimated’);
xlabel(‘Coefficient #’); ylabel(‘Coefficient Value’);
grid on;











 工商網監
工商網監
評論