 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
目前,全方位移動機器人由于具有出色的靈活性,已經(jīng)成為RoboCup中型組足球機器人比賽中最理想的選擇。而機器人的運動控制一直以來都是直接影響機器人性能的主要因素,也是移動機器人研究的熱點之一。本文研究了一種用FPGA技術(shù)實現(xiàn)三輪全方位移動機器人運動控制系統(tǒng)的方法,與雙DSP結(jié)構(gòu),DSP+CPLD結(jié)構(gòu),以及DSP+專用集成電路結(jié)構(gòu)等相比,該方法具有簡單可靠,擴展性強等特點。且FPGA設(shè)計簡單,使用方便,開發(fā)周期短,能夠?qū)崿F(xiàn)真正的SOPC系統(tǒng)。
1 全方位移動機器人運動模型
設(shè)世界坐標(biāo)系下機器人的速度為ε=[vx,vy,φ],則當(dāng)vx=O,vy≠0,φ=O時,機器人做前后方向的直線運動,當(dāng)vx≠0,vy=0,φ=0時,機器人做左右方向的直線運動,當(dāng)vx=0,vy=0,φ≠0時,機器人做自轉(zhuǎn)運動。圖1中,ω1,ω2,ω3為3個主動輪的轉(zhuǎn)動角速度,R為全向輪半徑;L1,L2,L3為機器人車體中心到3組全向輪中心的水平距離,設(shè)有L1=L2=L3=L。α為前兩輪之間的夾角,另外2個夾角均為180°-α/2。則機器人坐標(biāo)系下的速度到三輪速度之間的關(guān)系如下:
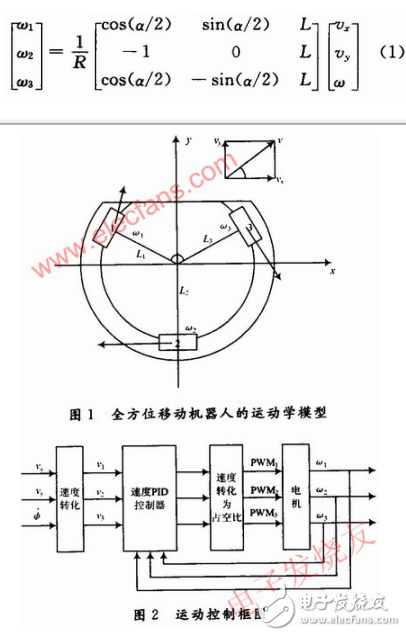
由式(1)可以看到:知道了機器人在平面世界坐標(biāo)系中的速度要求后,便可以得到主動輪的速度要求,進(jìn)而對電機發(fā)出相應(yīng)的控制信號。
2運動控制方案本系統(tǒng)總體設(shè)計思路如圖2所示,首先通過RS 232接口,實現(xiàn)PC機與底層控制芯片FPGA的通信,F(xiàn)PGA在接收到相關(guān)的機器人坐標(biāo)系下的速度后,將機器人坐標(biāo)系下的速度值轉(zhuǎn)化成機器人3個全向輪子的角速度,將得到的角速度值計算出相應(yīng)的占空比,生成相應(yīng)占空比的PWM波形,輸出信號接到直流伺服電機驅(qū)動器,然后通過FPGA采集正交編碼盤信號,計算出輪子實際的角速度值,做PID速度閉環(huán)控制。鑒于FPGA模塊復(fù)制的優(yōu)勢,這里對每個全向輪分別做了PID閉環(huán)控制。
- 一種全方位移動機器人的運動分析與控制實現(xiàn)
- 基于眼到手視覺伺服的移動機器人模型 9次下載
- 移動機器人路徑規(guī)劃與運動控制 12次下載
- 如何使用Matlab和VR技術(shù)實現(xiàn)移動機器人的建模和仿真 13次下載
- 移動機器人的關(guān)鍵技術(shù)有哪些 17次下載
- 如何通過測程法進(jìn)行四輪全向移動機器人定位 13次下載
- 使用Matlab和VR技術(shù)實現(xiàn)移動機器人的建模及仿真的方案說明 10次下載
- 在工廠環(huán)境中協(xié)助殘疾人的MeCunm輪式全方位移動機器人的開發(fā)資料下載 1次下載
- 移動機器人技術(shù)及其分類和空間定位技術(shù)詳解 16次下載
- 輪式移動機器人運動控制研究現(xiàn)狀的介紹及其設(shè)計介紹 16次下載
- 移動機器人的分類與移動機器人技術(shù)研究現(xiàn)狀和未來發(fā)展的分析 13次下載
- 移動機器人及其控制系統(tǒng)研制 0次下載
- 《移動機器人原理與設(shè)計》第三章運動學(xué) 0次下載
- 輪式移動機器人WMR的運動分析 33次下載
- 基于達(dá)芬奇的移動機器人開發(fā)平臺設(shè)計
- 智能移動機器人系統(tǒng)方案指南 480次閱讀
- 用于ROS移動機器人高集成電源解決方案(一) 1122次閱讀
- 采用Mecanum式全向移動輪及模塊化實現(xiàn)全方位移動機器人設(shè)計 3271次閱讀
- 移動機器人是如何定位的 4524次閱讀
- 移動機器人控制系統(tǒng)的發(fā)展方向? 1529次閱讀
- 移動機器人控制系統(tǒng)設(shè)計與仿真 3638次閱讀
- 仙知機器人自主研發(fā)用于移動機器人應(yīng)用專業(yè)級客戶端軟件Roboshop 6248次閱讀
- 移動機器人的機構(gòu)與分類分析 8268次閱讀
- 如何區(qū)分機器人、協(xié)作機器人和移動機器人? 7028次閱讀
- 關(guān)于被動同心轉(zhuǎn)向式多履帶全向移動機器人的設(shè)計 9148次閱讀
- 基于PLC的機器人伺服運動控制系統(tǒng)設(shè)計詳解 1.6w次閱讀
- 自主移動機器人的定位與地圖創(chuàng)建(SLAM)關(guān)鍵性問題 1985次閱讀
- 基于LPC2119的自主式移動機器人設(shè)計 1654次閱讀
- 基于FPGA技術(shù)的全方位移動機器人運動控制系統(tǒng)的方案設(shè)計 1241次閱讀
- 小生境遺傳算法的移動機器人路徑優(yōu)化技術(shù) 1254次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1相關(guān)協(xié)議信號總結(jié)
- 0.94 MB | 4次下載 | 免費
- 2運算放大器基本電路中文資料
- 1.30 MB | 2次下載 | 免費
- 3DS-CS3A P00-CN-V3
- 618.05 KB | 1次下載 | 免費
- 4常用電子元器件介紹
- 3.21 MB | 1次下載 | 免費
- 5PC1654 連續(xù)傳導(dǎo)模式(CCM)升壓式同步整流器控制器中文手冊
- 1.00 MB | 次下載 | 免費
- 6FS313B USB 的 PD和QC快充協(xié)議電壓誘騙控制器數(shù)據(jù)手冊
- 2.61 MB | 次下載 | 免費
- 7DS-HS2V H00 CN-V3
- 480.02 KB | 次下載 | 免費
- 8FS7203低壓降線性穩(wěn)壓器數(shù)據(jù)手冊
- 1.67 MB | 次下載 | 免費
本月
- 1涂鴉各WiFi模塊原理圖加PCB封裝
- 11.75 MB | 89次下載 | 1 積分
- 2錦銳科技CA51F2 SDK開發(fā)包
- 24.06 MB | 43次下載 | 1 積分
- 3錦銳CA51F005 SDK開發(fā)包
- 19.47 MB | 19次下載 | 1 積分
- 4PCB的EMC設(shè)計指南
- 2.47 MB | 16次下載 | 1 積分
- 5HC05藍(lán)牙原理圖加PCB
- 15.76 MB | 13次下載 | 1 積分
- 6蘋果iphone 11電路原理圖
- 4.98 MB | 7次下載 | 2 積分
- 7基礎(chǔ)模擬電子電路
- 3.80 MB | 5次下載 | 1 積分
- 8STM32F3系列、STM32F4系列、STM32L4系列和STM32L4+系列Cortex-M4編程手冊
- 3.32 MB | 5次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935127次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關(guān)降壓/升壓雙向直流/直流轉(zhuǎn)換器 PCB layout 設(shè)計
- 1.48MB | 420064次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233089次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費下載
- 340992 | 191390次下載 | 10 積分
- 5十天學(xué)會AVR單片機與C語言視頻教程 下載
- 158M | 183342次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81591次下載 | 10 積分
- 7Keil工具M(jìn)DK-Arm免費下載
- 0.02 MB | 73815次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65989次下載 | 10 積分





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論