完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
標簽 > 運動控制器

運動控制(Motion Control)通常是指在復雜條件下將預定的控制方案、規劃指令轉變成期望的機械運動,實現機械運動精確的位置控制、速度控制、加速度控制、轉矩或力的控制。
運動控制(Motion Control)通常是指在復雜條件下將預定的控制方案、規劃指令轉變成期望的機械運動,實現機械運動精確的位置控制、速度控制、加速度控制、轉矩或力的控制。
運動控制器就是控制電動機的運行方式的專用控制器:比如電動機在由行程開關控制交流接觸器而實現電動機拖動物體向上運行達到指定位置后又向下運行,或者用時間繼電器控制電動機正反轉或轉一會停一會再轉一會再停。運動控制在機器人和數控機床的領域內的應用要比在專用機器中的應用更復雜,因為后者運動形式更簡單,通常被稱為通用運動控制(GMC)。
運動控制(Motion Control)通常是指在復雜條件下將預定的控制方案、規劃指令轉變成期望的機械運動,實現機械運動精確的位置控制、速度控制、加速度控制、轉矩或力的控制。
運動控制器就是控制電動機的運行方式的專用控制器:比如電動機在由行程開關控制交流接觸器而實現電動機拖動物體向上運行達到指定位置后又向下運行,或者用時間繼電器控制電動機正反轉或轉一會停一會再轉一會再停。運動控制在機器人和數控機床的領域內的應用要比在專用機器中的應用更復雜,因為后者運動形式更簡單,通常被稱為通用運動控制(GMC)。

運動控制器就是控制電動機的運行方式的專用控制器:比如電動機在由行程開關控制交流接觸器而實現電動機拖動物體向上運行達到指定位置后又向下運行,或者用時間繼電...
2018-04-24 標簽:運動控制器 10.5萬 0
本文首先介紹了運動控制器的架構組成及優缺點,其次介紹了運動控制器的功能,最后闡述了運動控制器的工作原理及應用。
運動控制器就是控制電動機的運行方式的專用控制器:比如電動機在由行程開關控制交流接觸器而實現電動機拖動物體向上運行達到指定位置后又向下運行,或者用時間繼電...
2018-04-24 標簽:運動控制器 3.4萬 0
模擬信號 這種方式下,運動控制系統給伺服驅動器發送+/-10V的模擬電壓指令,同時接收來自電機編碼器或直線光柵等位置檢測元件的位置反饋信號;伺服驅動器工...
PLCopen工作組出了一套標準化工具,能在PLC編程環境下直接對運動控制編程
傳統上,工業機器人使用復雜的專有語言編程,對外人來說是很難的,只有機器人程序員才能理解。運動控制器現在應用廣泛多樣,通常使用PC庫或其他專有語言來編程,...
運動控制(Motion Control)通常是指在復雜條件下,將預定的控制方案、規劃指令轉變成期望的機械運動,實現機械運動精確的位置控制、速度控制、加速...
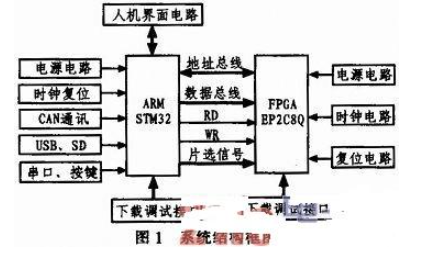
作者:吳 輝,羅富文,杜文廣 運用低功耗Cortex—M3微控制器STM32F103VBT6和FPGA芯片設計一種基于CAN總線的運動控制器。介紹系統的...

本系統采用的下位機為翠歐運動控制器MC206,根據本課題的要求,為了方便進行系統的調試和控制,纏繞機的工作方式分為手動、自動和半自動三種”。手動工作狀態...
2018-04-24 標簽:運動控制器 7974 0
本節主要介紹XPLC006E多軸經濟型EtherCAT總線運動控制器控制EtherCAT總線驅動器的方法,分別介紹硬件接線方法,控制器與EtherCAT...
控制裝置可以是PLC系統,也可以是專用的自動化裝置(如運動控制器、運動控制卡)。也可以這樣理解:PLC的使用是一種普通的運動控制裝置。運動控制器是一種特...

本文通過ZMC430N運動控制器在轉盤式視覺篩選設備中的方案應用,來深入了解正運動技術運動控制器配合機器視覺進行視覺飛拍、PSO高速硬件位置比較輸出等功...
2022-09-29 標簽:運動控制器 1.9萬 0
正運動:在運動控制領域中做最好用的運動控制器,這是我們的發展使命和追求
正運動于2013年正式成立。談及公司的成立背景,胡明權表示,隨著勞動力成本的日漸增高,智能制造是一個必然的趨勢,而智能制造離不開運動控制技術的發展,并且...
TMC8670是一款磁場定向控制(FOC)伺服控制器,具有CANopen over EtherCAT?協議棧,可以比任何基于軟件的解決方案都更快地處理實...
鎂伽機器人已完成近千萬美元的A輪融資,鎂伽到底有何魅力?讓資本如此青睞?
要實現該模式的成功,對機器人租賃服務提供商的硬件成本控制能力提出很高的要求,而對于鎂伽機器人來說,由于具備核心技術以及完整的供應鏈體系,產品成本的自主可...
運動控制器就是控制電動機的運行方式的專用控制器:比如電動機在由行程開關控制交流接觸器而實現電動機拖動物體向上運行達到指定位置后又向下運行,或者用時間繼電...
技術需知伺服電機調試的基本步驟, 運動控制器控制伺服電機通常采用兩種指令方式: 1、數字脈沖 這種方式與步進電機的控制方式類似,運動控制器給伺服驅動器發...
臺達推出新款嵌入式運動控制器DXMC系列 可控制32個實體軸與64個虛擬軸
標準型DXMC-S系列采用1.8GHz×4核心的高性能處理器,8軸EtherCAT同步周期可短至125 us,單步IL指令0.419 ns,突出的性能配...
設計了一種基于DSP與FPGA的運動控制器。具有結構簡單、開放性、模塊化等特點,能夠較好的滿足運動控制器的實時性和精確性。
2012-02-27 標簽:運動控制器 5392 0
 換一批
換一批
編輯推薦廠商產品技術軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯網 | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發電 | UPS | AR | 智能電網 | 國民技術 | Microchip |
| 開關電源 | 步進電機 | 無線充電 | LabVIEW | EMC | PLC | OLED | 單片機 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 藍牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太網 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 語音識別 | 萬用表 | CPLD | 耦合 | 電路仿真 | 電容濾波 | 保護電路 | 看門狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 閾值電壓 | UART | 機器學習 | TensorFlow |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1