 LabVIEW運動控制(五):EtherCAT運動控制器的心跳檢測功能
LabVIEW運動控制(五):EtherCAT運動控制器的心跳檢測功能

ZMC408CE 高性能總線型運動控制器
ZMC408CE是正運動推出的一款多軸高性能EtherCAT總線運動控制器,具有EtherCAT、EtherNET、RS232、CAN和U盤等通訊接口,ZMC系列運動控制器可應用于各種需要脫機或聯機運行的場合。

ZMC408CE支持PLC、Basic、HMI組態三種編程方式。PC上位機API編程支持C#、C++、LabVIEW、Matlab、Qt、Linux、VB.Net、Python等接口。

ZMC408CE硬件功能特性:
1.支持8軸運動控制(脈沖+EtherCAT總線),EtherCAT同步周期可快至125us;
2.24路通用輸入、16路通用輸出,模擬量AD/DA各兩路;
3.8路10MHz高速差分脈沖輸出,總線軸、脈沖軸可混合插補;
4.高性能處理器,提升運算速度、響應時間和掃描周期等;
5.一維/二維/三維、多通道視覺飛拍,高速高精;
6.位置同步輸出PSO,連續軌跡加工中對精密點膠膠量控制和激光能量控制等;
7.多軸同步控制,多坐標系獨立控制等;
8.直線插補、任意空間圓弧插補、螺旋插補、樣條插補等;
9.應用靈活,可PC上位機開發,也可脫機獨立運行;
ZMC408CE視頻介紹,點擊→“高性能EtherCAT總線運動控制器,帶你玩轉“8通道獨立PSO”應用場景”查看。
更多關于ZMC408CE的詳情介紹,點擊“推薦|8通道PSO的高性能EtherCAT總線運動控制器”查看。
PCIE464M PCIe EtherCAT總線運動控制卡
PCIE464M是一款基于PCIe的PCI Express的EtherCAT總線運動控制卡,具有多項實時和高精度運動控制控制功能。
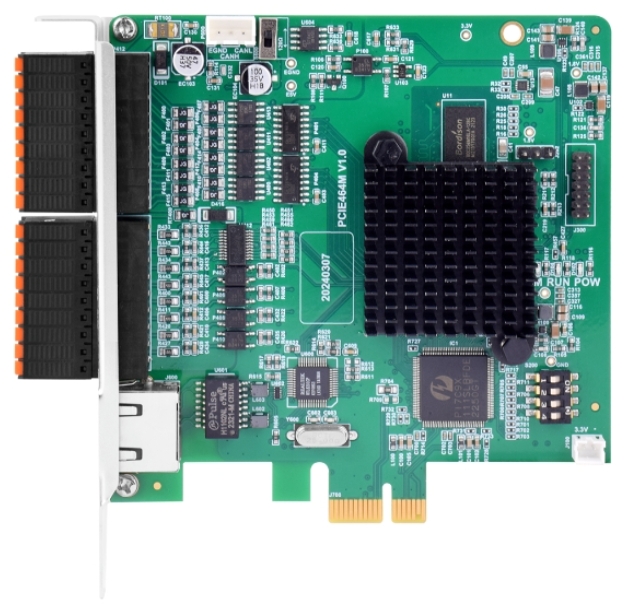
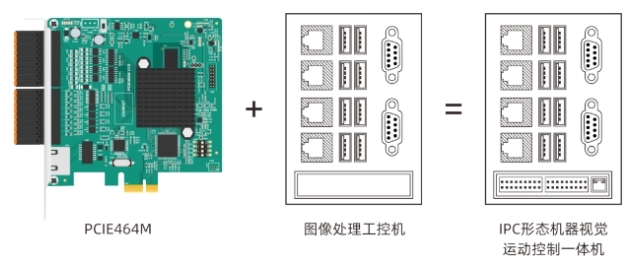
PCIE464M運動控制卡上自帶16進16出,第三方圖像處理工控機或PC無需額外配置IO數據采集卡和PLC,即可實現IPC形態的機器視覺運動控制一體機,簡化硬件架構,節省成本,軟硬件一體化。
PCIE464M硬件功能特性:
1.可選6-64軸運動控制,支持EtherCAT總線/脈沖/步進伺服驅動器;
2.聯動軸數最高可達16軸,運動周期最小為100μs;
3.標配16進16出,其中4路高速鎖存輸入、4路高速PWM和12路高速硬件比較輸出PSO;
4.支持PWM輸出、1D/2D/3D PSO硬件位置比較輸出、視覺飛拍、連續軌跡插補等;
5.支持30+機械手模型正逆解模型算法,比如SCARA、Delta、UVW、4軸/5軸 RTCP...;
6.支持掉電存儲和掉電中斷,多重加密,提供程序更安全機制;
7.8路單端脈沖軸、4路單端編碼器軸;
8.具有一維、二維螺距補償控制,實現更高的加工精度;
PCIE464M視頻介紹,點擊→“超高速PCle EtherCAT控制卡PCIE464M,即刻提升高速高精智能裝備生產力!”查看。
更多關于PCIE464M的詳情介紹,點擊“PCIE464M-高速高精,超高速PCIe EthrtCAT實時運動控制卡”查看。
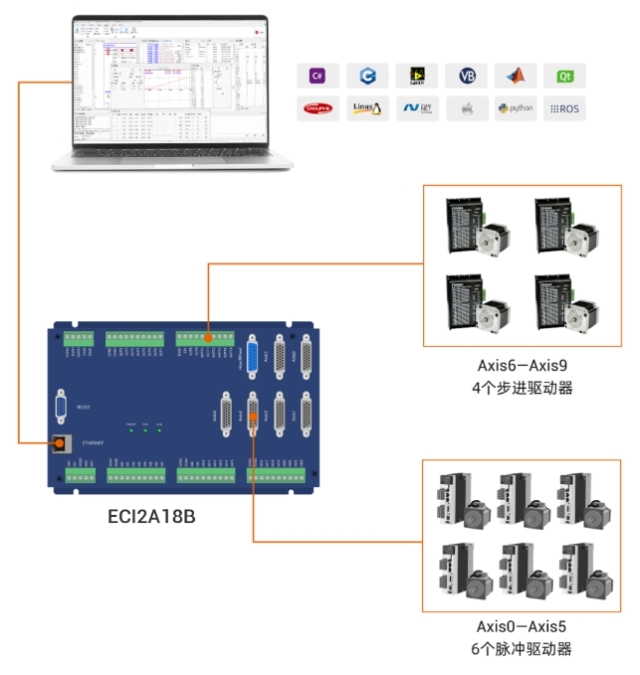
ECI2A18B 高性價比10軸運動控制卡
ECI2A18B是正運動推出的一款高性價比10軸脈沖型、模塊化的網絡型運動控制卡,采用優化的網絡通訊協議可以實現實時的運動控制,同時支持多種通信協議,方便與其他工業控制設備連接和集成。安裝配置相對便捷,適合于模塊化和靈活性要求較高的控制系統。
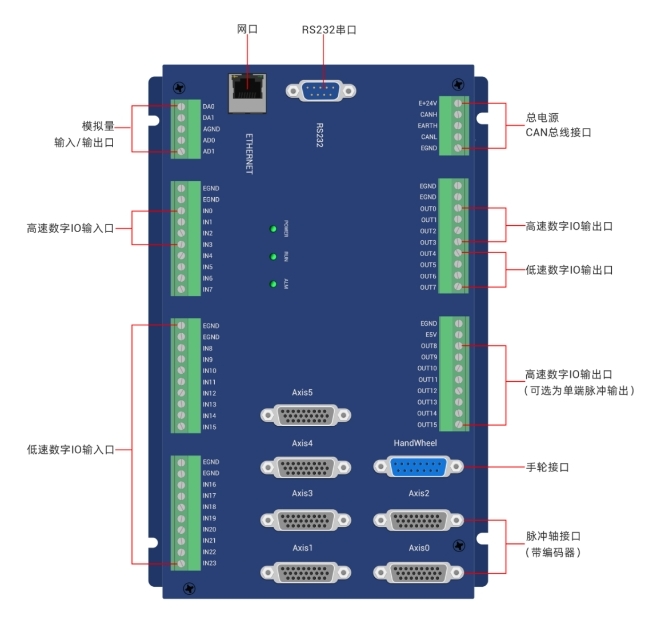
ECI2A18B控制卡最大可擴展至12脈沖軸,支持8路高速輸入和4路高速輸出,集成豐富的運動控制功能,包含多軸點位運動、電子凸輪,直線插補,圓弧插補,連續插補運動等,滿足多樣化的工業應用需求。
ECI2A18B硬件功能特性:
1.支持6路差分脈沖軸+4路單端脈沖軸運動控制;
2.支持1路專用的手輪輸入接口;
3.差分脈沖軸最大輸出脈沖頻率10MHz;
4.標配24+12進16+6出,其中支持4路高速鎖存,4路高速PWM,2路高速硬件比較輸出PSO(可選支持HW2功能);
5.可支持RTSys+其他高級上位機編程語言的混合編程支持;
6.支持RTBasic多任務編程;
ECI2A18B視頻介紹,點擊→“【加量不加價】高性價比十軸脈沖運動控制卡ECI2A18B 讓您的設備在自動化行業內卷中脫穎而出!”查看。
更多關于ECI2A18B的詳情介紹,點擊“【加量不加價】正運動網絡型運動控制卡ECI2618B/ECI2A18B”查看。
??? 使用LabVIEW進行項目開發
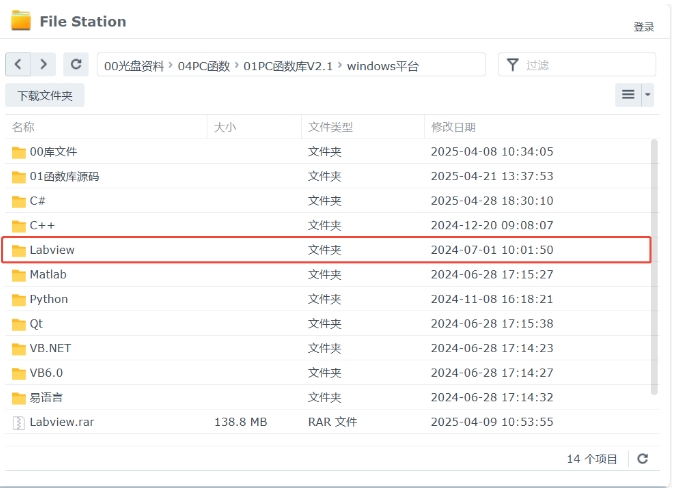
1.找到廠家提供的光盤資料里面的LabVIEW的VI庫文件,路徑如下。
1)進入廠商提供的光盤資料找到“04PC函數”文件夾,并點擊進入。

2)選擇“01PC函數庫V2.1”文件夾。

3)選擇“Windows平臺”文件夾。

4)選擇“Labview”文件夾,里面有32位和64位的動態庫和例程。

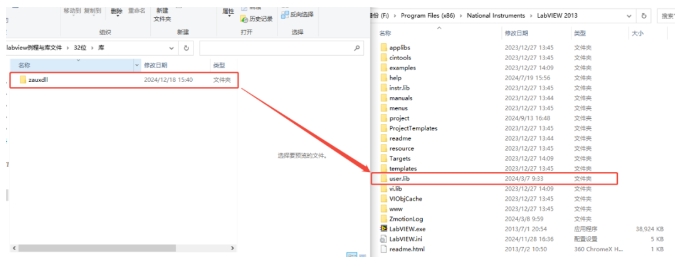
2.將廠商提供的LabVIEW的VI庫文件復制到LabVIEW安裝路徑下LabVIEW/user.lib的文件夾內。
1)找到解壓的VI庫文件夾(zaudll是32位的VI庫,64的VI庫是newZauxDll64)。

2)選中LabVIEW右擊打開文件所在位置(這里以LabVIEW2013-32位為演示)。

3)將整個VI庫文件夾直接復制放到user.lib該目錄,然后關閉LabVIEW軟件重新啟動。
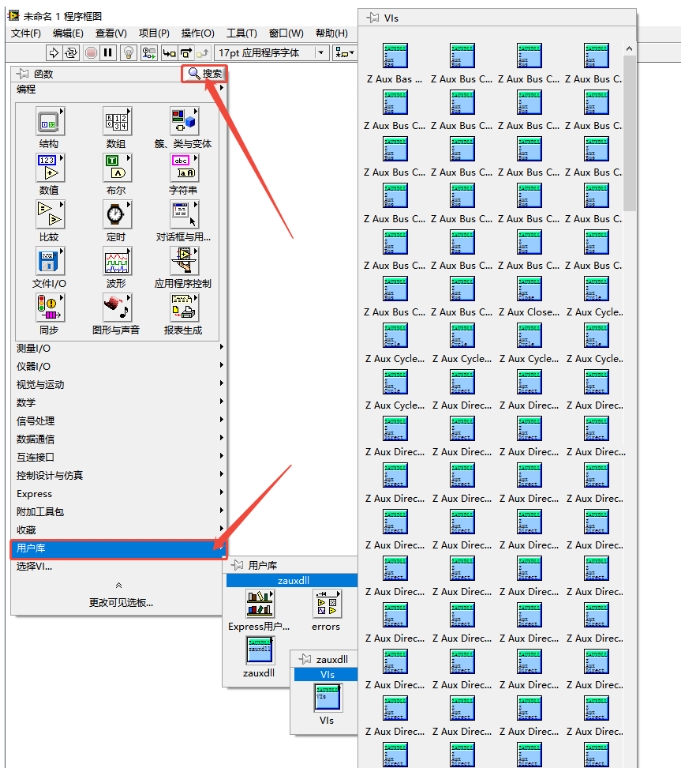
3.重新啟動LabVIEW后,選擇新建VI,然后右鍵點擊VI程序框圖空白處,選擇用戶庫來找到添加的VI庫,或者直接搜索VI,最后將需要的函數直接拖到面板上。

??? 例程相關函數說明
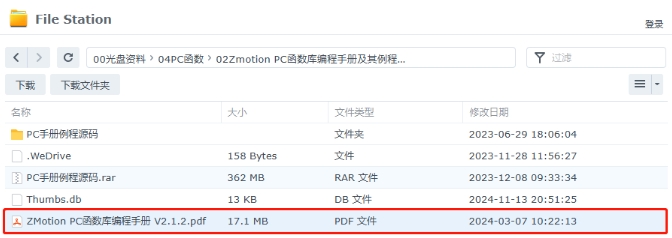
PC函數手冊可在光盤資料查看,具體路徑如下。
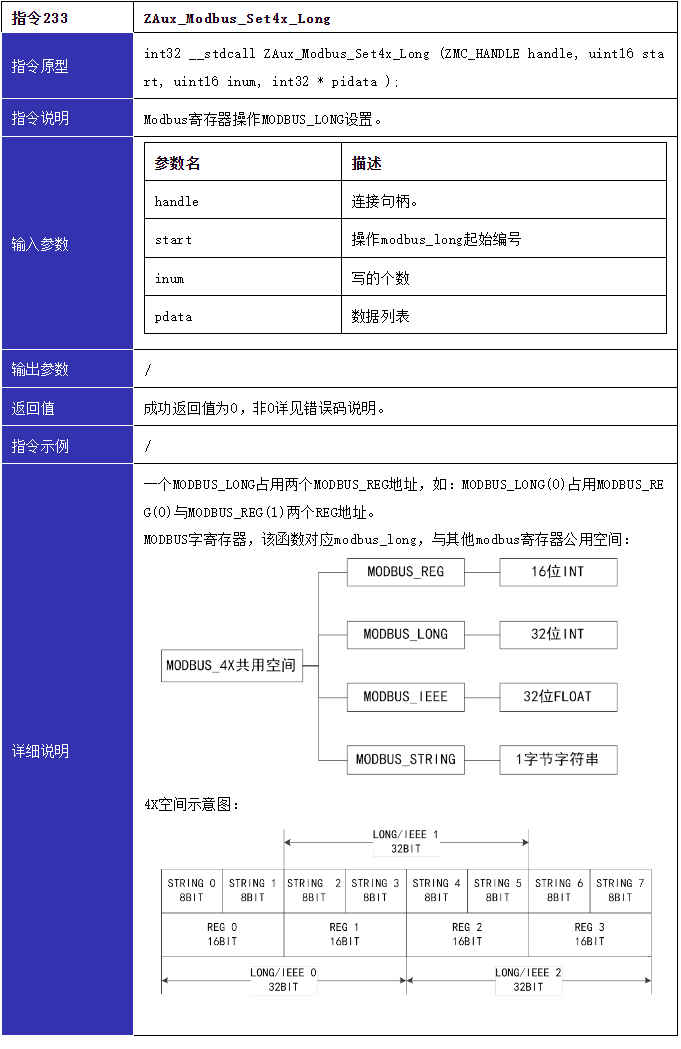
??? 心跳檢測
1.控制器與上位機采用心跳檢測的優勢主要體現在以下方面:
(1)實時監測
通過檢測上位機與下位機的通信狀態,可以實時監測上位機是否正常連接和通訊。一旦發現上位機掉線,系統可以及時采取相應的應對措施,避免因為掉線導致通訊中斷或數據丟失。
(2)系統穩定性
上位機是控制系統的核心部分,掉線可能會導致整個系統失去控制。掉線檢測可以保障系統的穩定性,及時發現掉線情況并進行處理,保持系統正常運行。
(3)數據完整性
上位機通常負責與用戶界面交互、數據處理和決策,數據的完整性對系統運行至關重要。通過掉線檢測,系統可以及時發現掉線情況,保證數據的完整性和準確性。
(4)故障診斷
掉線檢測可以作為系統故障診斷的一種手段,通過監測上位機的狀態,可以幫助確定系統出現問題的具體原因,加快故障排查和修復的速度。
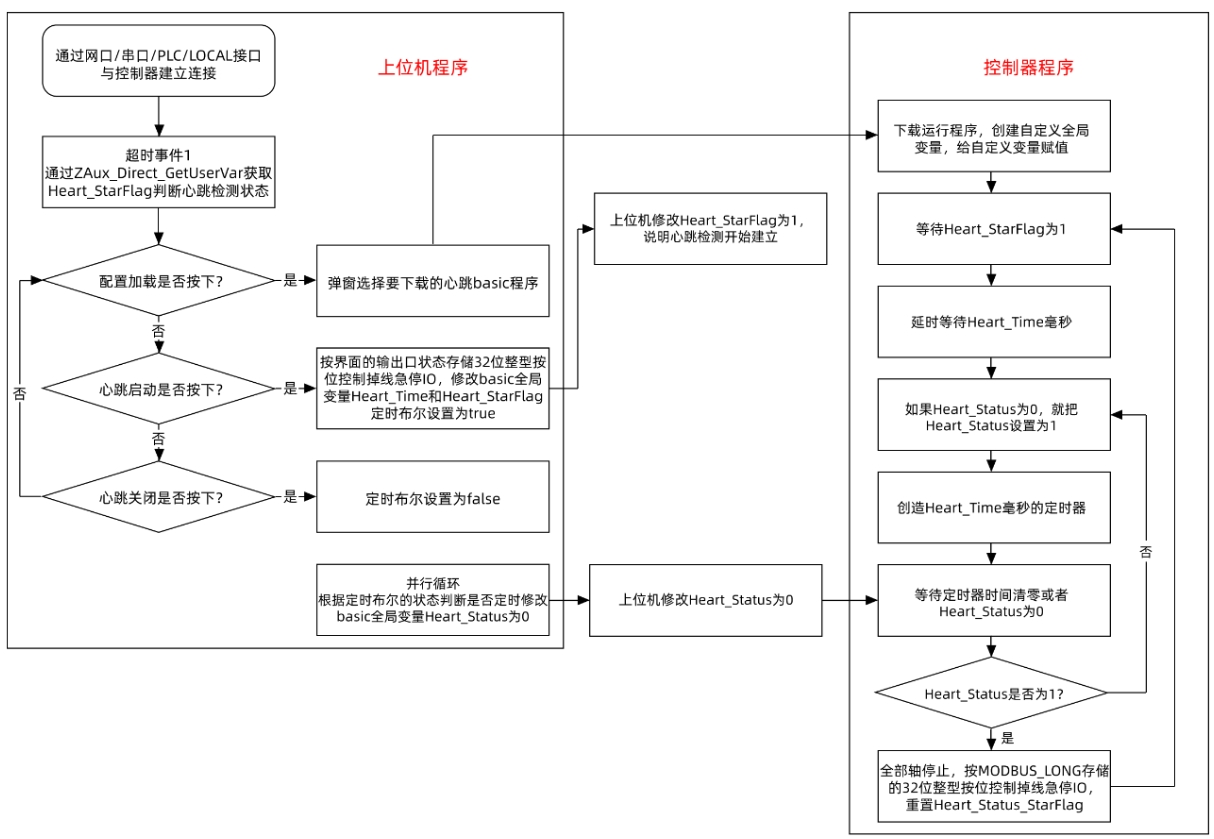
2.心跳檢測的原理:
心跳檢測的實現主要由兩個部分組成:
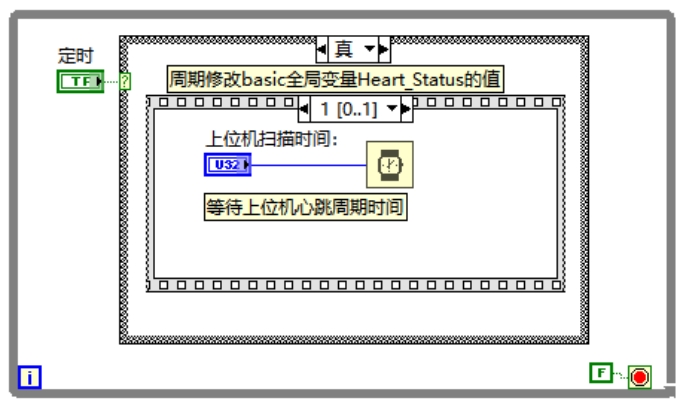
(1)上位機定時獲取basic全局變量判斷是否掉線,周期修改baisc全局變量的值;
(2)控制器程序周期檢測baisc全局變量的值并在掉線的時候執行一些急停操作。
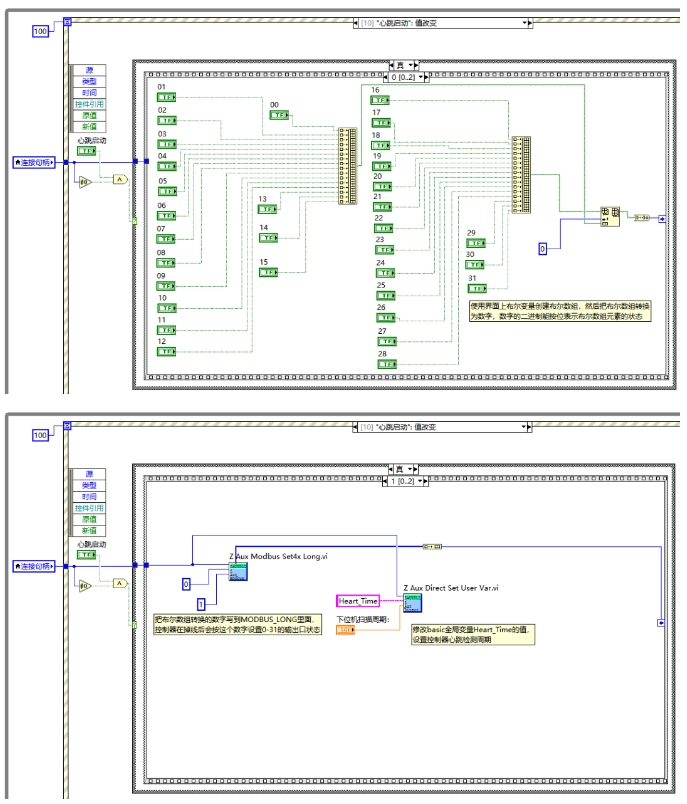
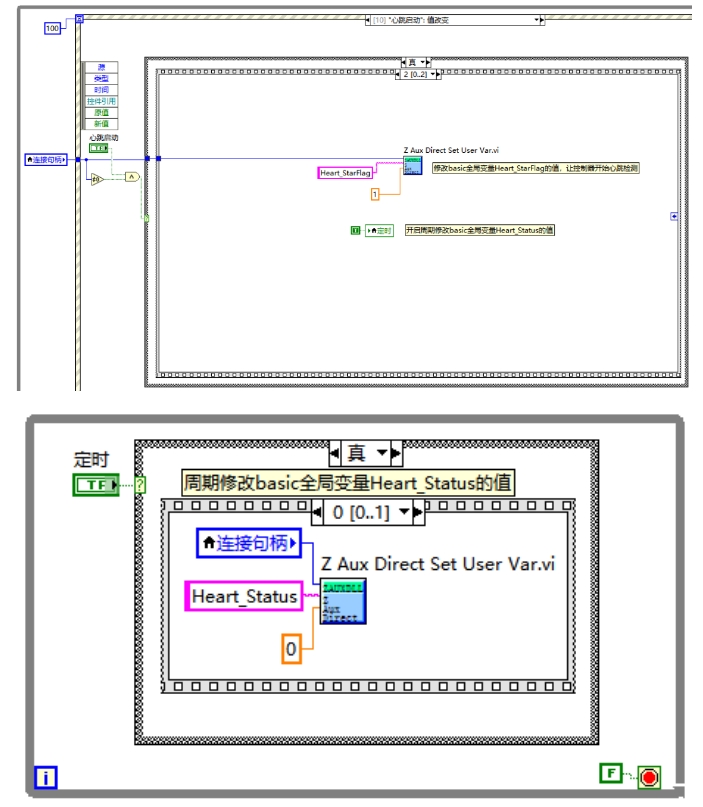
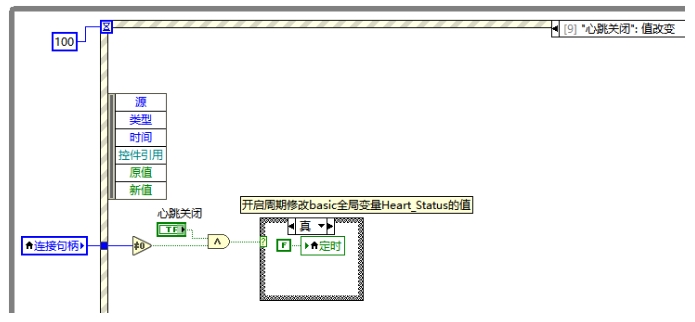
在示例中,上位機程序會定時獲取并判斷Heart_StarFlag的值和返回的錯誤碼來判斷控制器是否下載了心跳檢測basic程序,是否開啟了心跳檢測,還會周期修改Heart_Status的值,然后控制器程序會周期掃描Heart_Status,并在檢測到變量的值異常的時候打開輸出口,模擬掉線急停的操作。
流程圖如下所示:
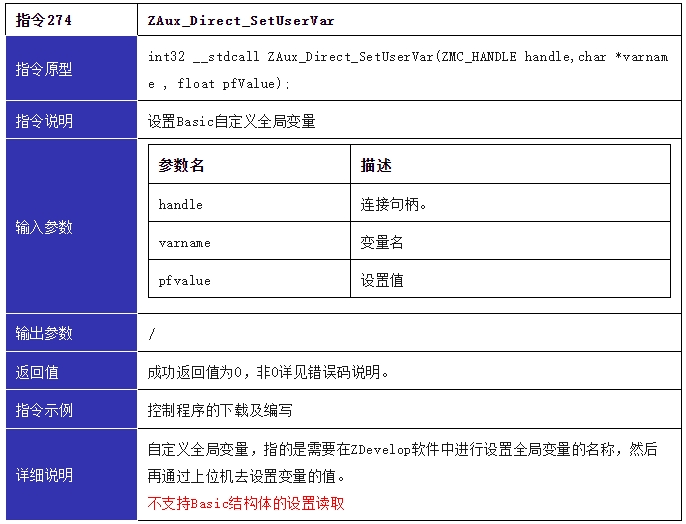
3.心跳檢測的basic程序:
(1)創建變量
'*************************************心跳相關變量定義************************ GlobalHeart_StarFlag '通訊標識變量 GlobalHeart_Status '通訊標識變量 GlobalHeart_Time '心跳超時時間 GlobalOutList_Address '急停OUTmodbus_long起始地址(Ps:3系列以下,自定義變量為24位浮點數,32位精度丟失,用modbus_long來代替) Heart_StarFlag=-1 Heart_Status=0 OutList_Address=0
(2)開啟掃描
掃描流程:
①等待上位機發送掃描開始指令;
②根據控制器信號進入不同掃描程序(原理一樣只是實現略有不同);
③將通訊標識變量置1;
④等待一個超時時間;
⑤判斷通訊標識;
⑥如果為1表示上位機沒有進行通訊,掉線狀態。進行掉線保護操作;
⑦為0表示進行通訊,正常狀態。開啟下一次掃描。
WHILETRUE WAITuntilHeart_StarFlag=1 '等待PC軟件連接 DELAYHeart_Time 'PC連接之后,延時一個超時時間,避免上位機不能及時修改Heart_Status WHILETRUE ifHeart_Status=0then Heart_Status=1 '等待PC上修改通訊變量 ticks=Heart_Time '開始倒計時 WAITuntilticks
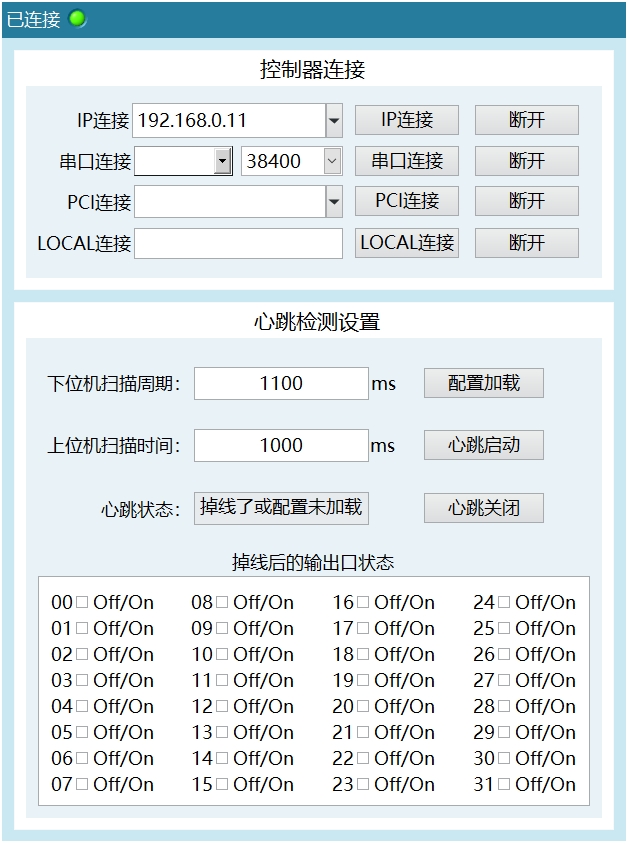
???例程說明
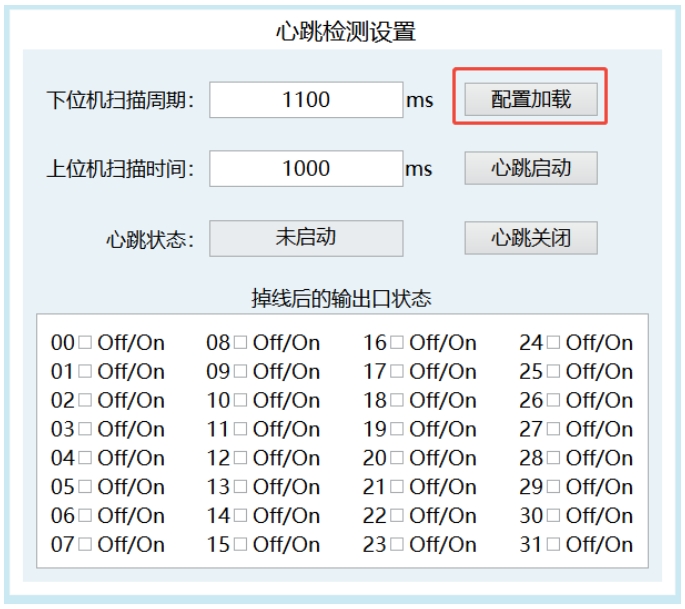
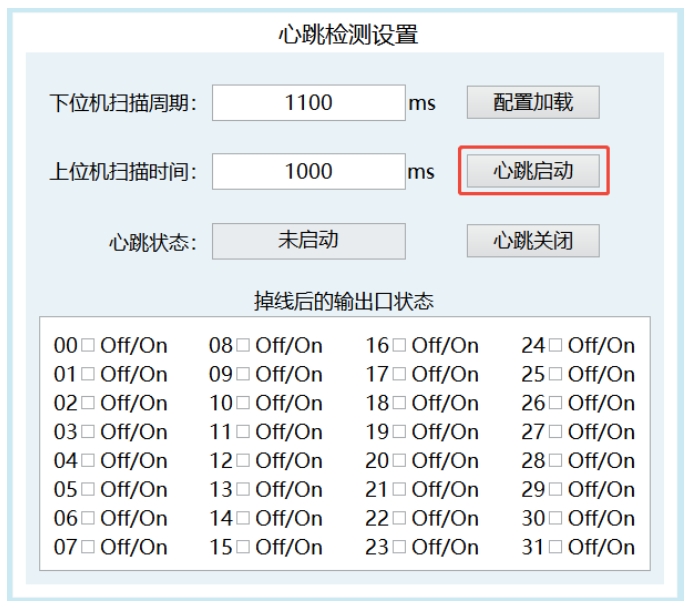
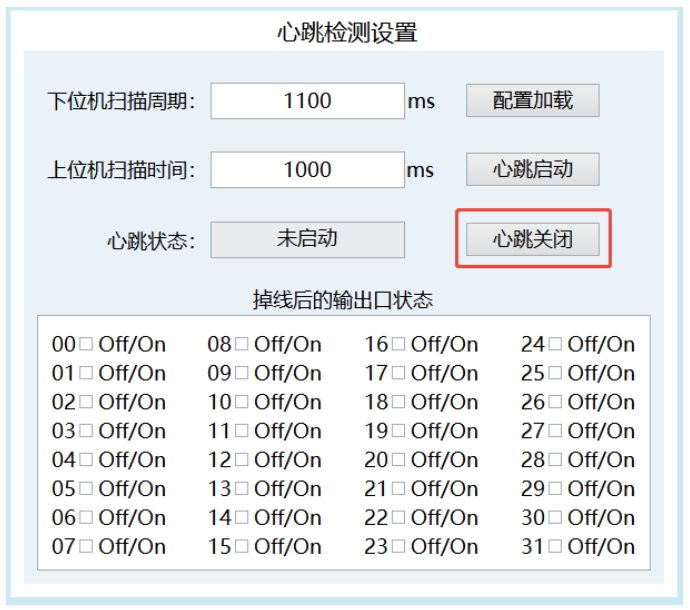
1.例程界面如下
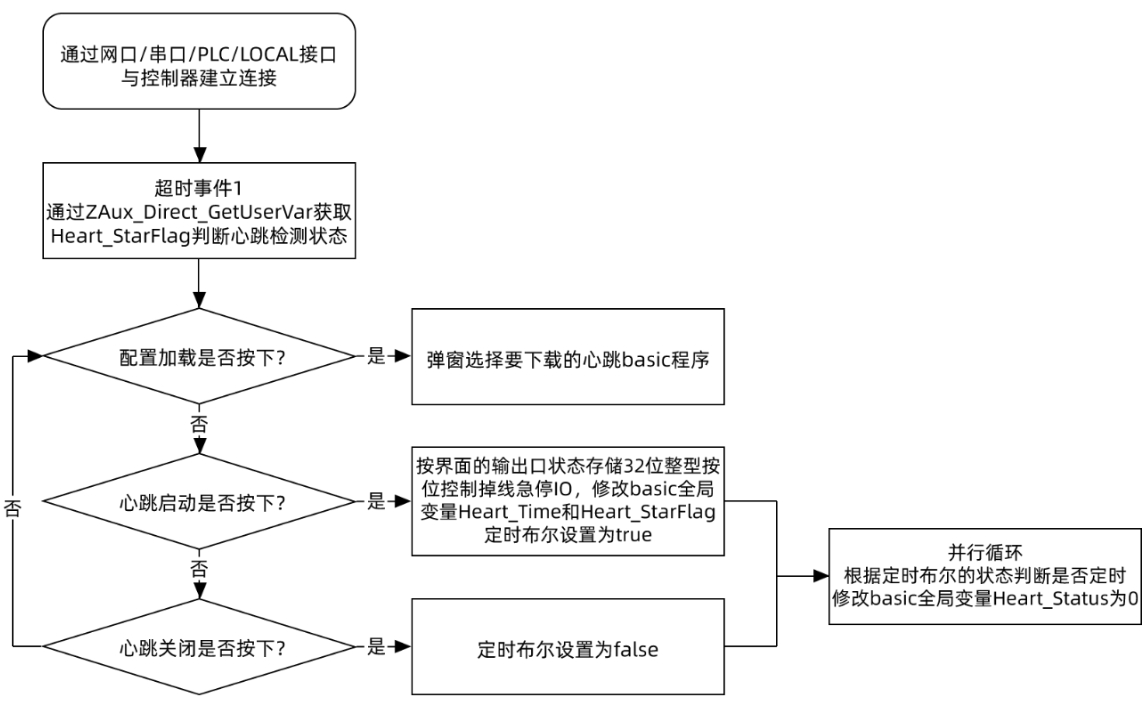
2.例程簡易流程圖
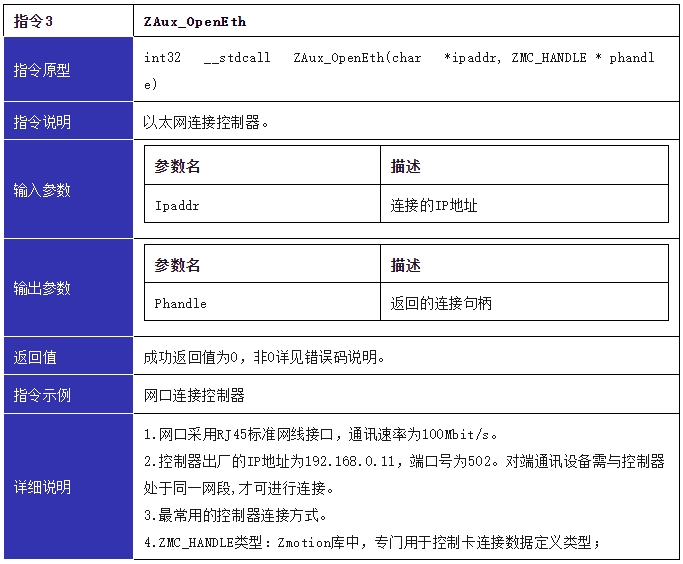
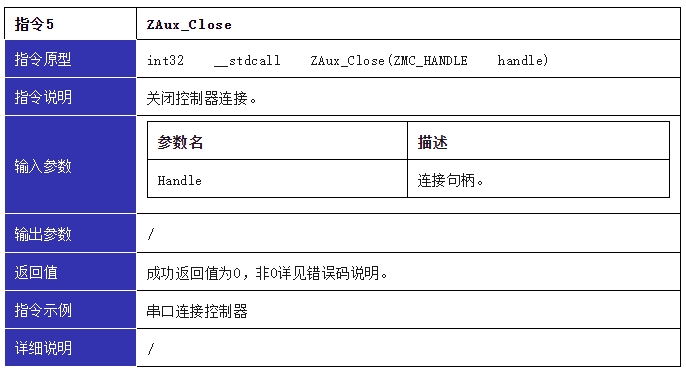
3.連接控制器
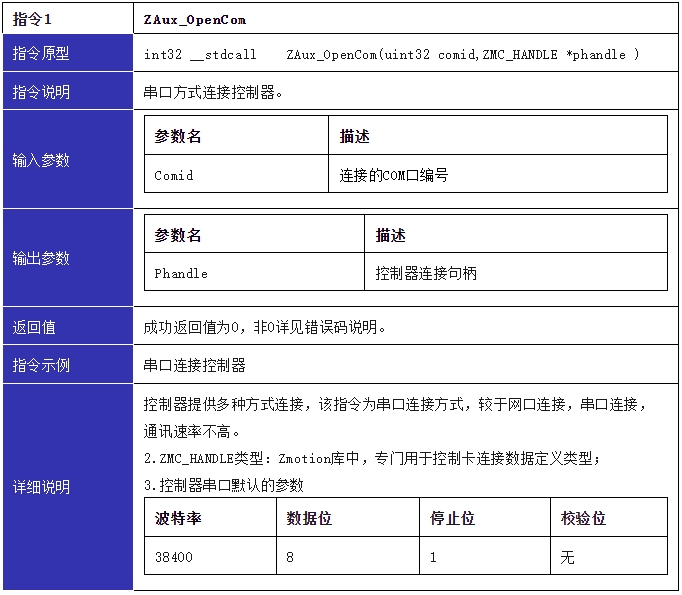
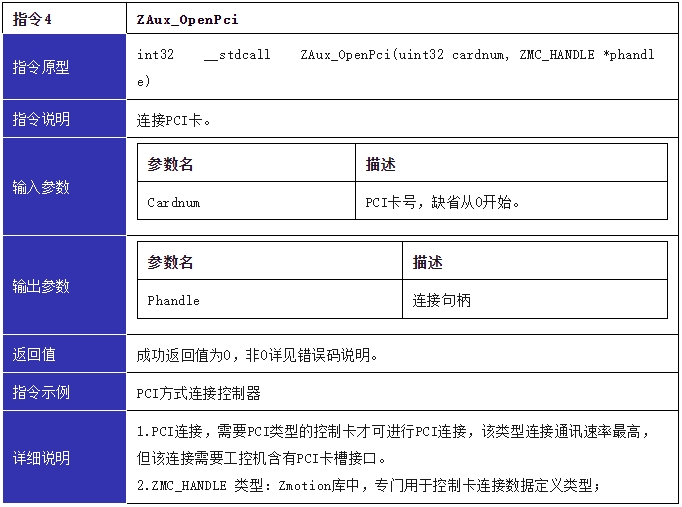
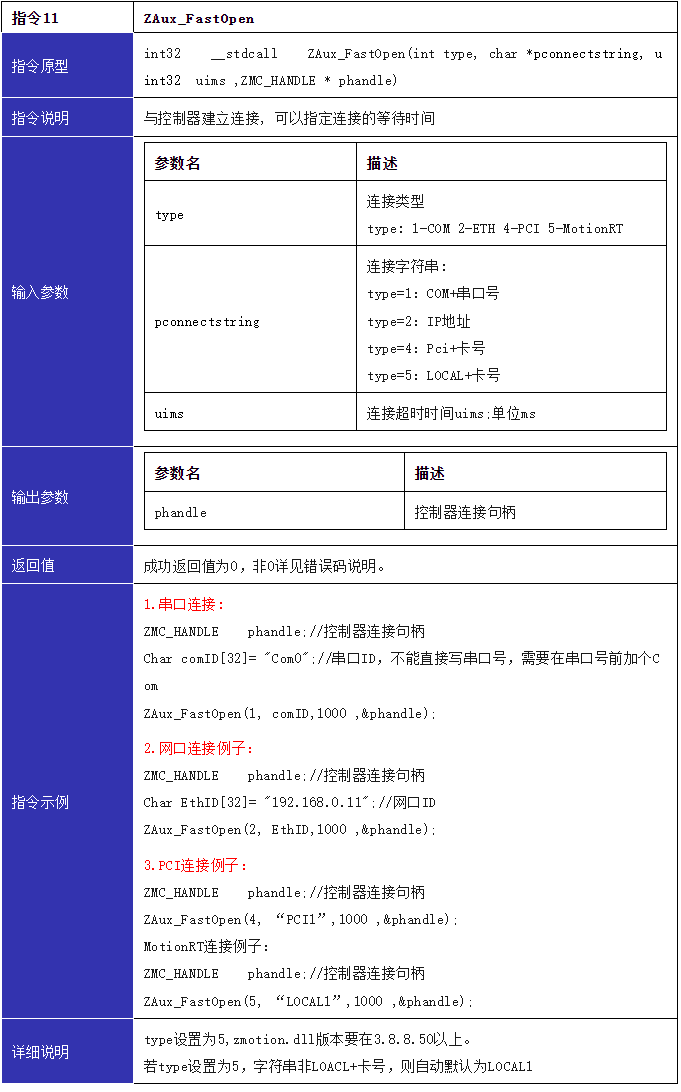
要想通過上位機控制控制器,就必須先連接控制器,上位機連接控制器的接口有四種,分別是網口連接、串口連接、PCI和LOCAL連接。
IP連接方式
串口連接方式
PCI連接方式
LOCAL連接方式
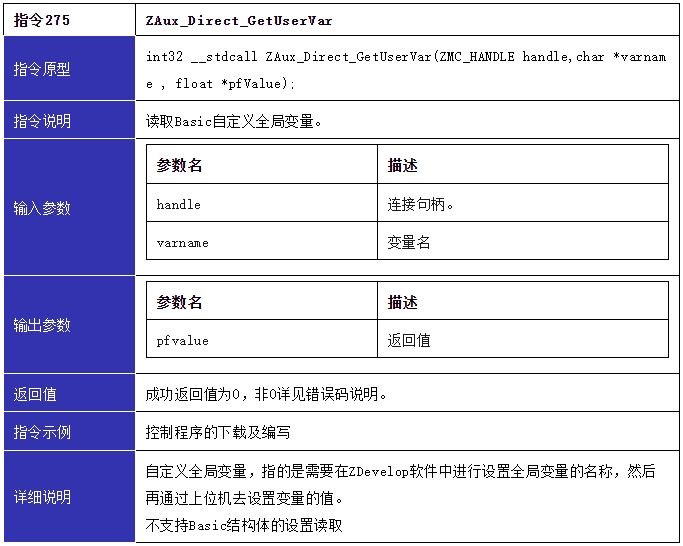
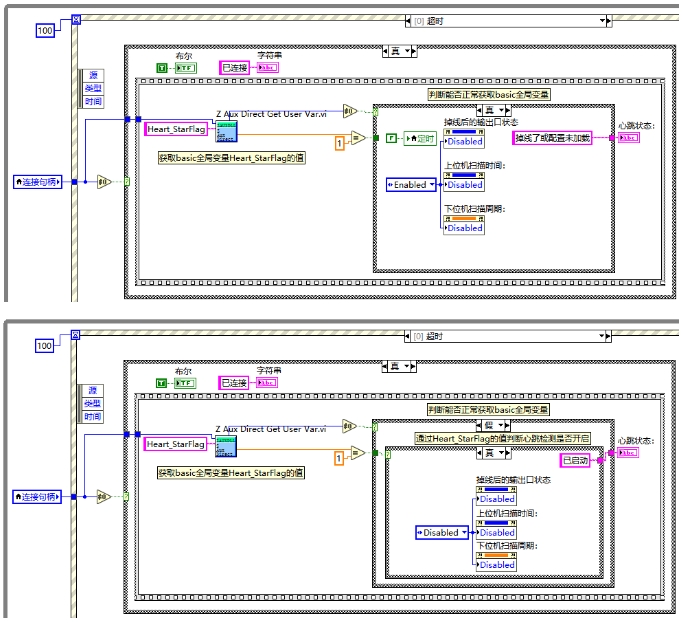
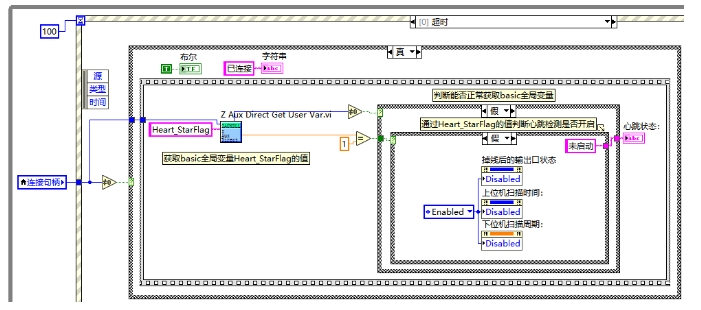
4.成功連接控制器后,超時事件會定時獲取basic全局變量判斷是否掉線
程序會定時獲取并判斷Heart_StarFlag的值和返回的錯誤碼來判斷控制器是否下載了心跳檢測basic程序,是否開啟了心跳檢測。
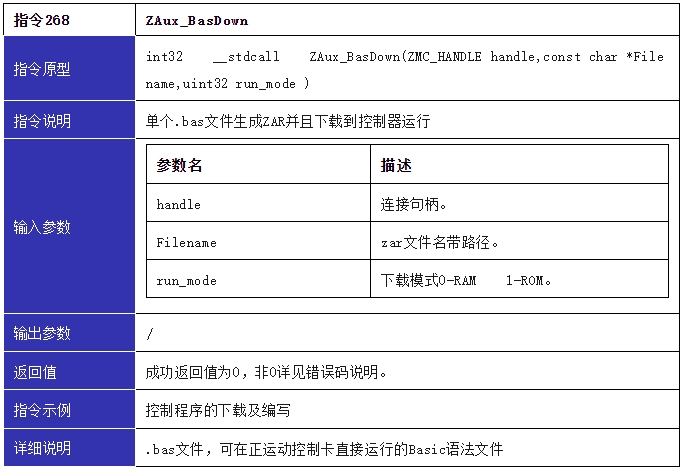
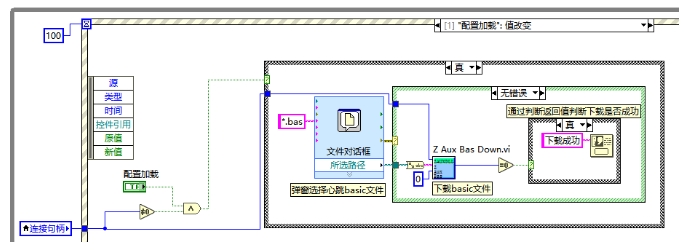
5.在開啟心跳檢測前,要先把心跳檢測的basic程序下載到控制器
可以通過ZAux_BasDown接口把心跳檢測的basic程序下載到控制器。
6.心跳檢測啟動
7.心跳檢測關閉
教學視頻講解可點擊→“LabVIEW運動控制(五):EtherCAT運動控制器的心跳檢測功能”查看。
完整代碼獲取地址
▼
本次,正運動技術LabVIEW運動控制(五):EtherCAT運動控制器的心跳檢測功能,就分享到這里。
更多精彩內容請關注“正運動小助手”公眾號,需要相關開發環境與例程代碼,請咨詢正運動技術銷售工程師:400-089-8936。
本文由正運動技術原創,歡迎大家轉載,共同學習,一起提高中國智能制造水平。文章版權歸正運動技術所有,如有轉載請注明文章來源。
正運動技術專注于運動控制技術研究和通用運動控制軟硬件產品的研發,是國家級高新技術企業。正運動技術匯集了來自華為、中興等公司的優秀人才,在堅持自主創新的同時,積極聯合各大高校協同運動控制基礎技術的研究,是國內工控領域發展最快的企業之一,也是國內少有、完整掌握運動控制核心技術和實時工控軟件平臺技術的企業。主要業務有:運動控制卡_運動控制器_EtherCAT運動控制卡_EtherCAT控制器_運動控制系統_視覺控制器__運動控制PLC_運動控制_機器人控制器_視覺定位_XPCIe/XPCI系列運動控制卡等。
審核編輯 黃宇

-
運動控制器
+關注
關注
2文章
448瀏覽量
25246 -
ethercat
+關注
關注
19文章
1093瀏覽量
39944
發布評論請先 登錄





正運動技術運動控制器EtherCAT總線快速入門
經濟型EtherCAT運動控制器:EtherCAT總線快速入門
EtherCAT運動控制邊緣控制器ZMC432H的軸參數配置和單軸運動控制

全國產EtherCAT運動控制邊緣控制器(五):IO配置與回零運動的Python+Qt開發

凌華科技基于軟件控制的EtherCAT運動控制器

EtherCAT運動控制器在LabVIEW中的運動控制與實時數據采集






 工商網監
工商網監
評論