完善資料讓更多小伙伴認識你,還能領(lǐng)取20積分哦,立即完善>
電子發(fā)燒友網(wǎng)技術(shù)文庫為您提供最新技術(shù)文章,最實用的電子技術(shù)文章,是您了解電子技術(shù)動態(tài)的最佳平臺。
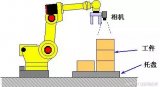
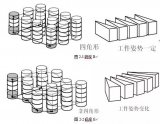
視覺堆垛程序通過相機視野內(nèi)目標(biāo)比例的變化來估算目標(biāo)的高度并引導(dǎo)機器人的運動補償目標(biāo)的偏移,不但包括X軸,Y軸和X-Y平面旋轉(zhuǎn)度R,也同時包括Z軸。...
機器人控制器是機器人系統(tǒng)的核心部件,負責(zé)接收來自PLC或其他傳感器的指令,并根據(jù)這些指令控制機器人的運動和操作。機器人控制器通常具有強大的計算能力、實時反饋和高精度運動控制功能,使得機器人能夠完成復(fù)雜的任務(wù),如裝配、焊接、搬運等。...
工業(yè)機器人痛點在于開發(fā)交付門檻較高,需要專業(yè)工程師手動編寫代碼、反復(fù)調(diào)試后,才能匹配產(chǎn)線特有的任務(wù)需求,高昂成本極大阻礙了工業(yè)機器人的普及。...
動力問題是機器人的核心問題,波士頓動力采用液壓執(zhí)行器進行輔助驅(qū)動。波士頓動力早期機器人主要是電機通過齒輪驅(qū)動連桿機構(gòu),對于沒有載荷要求的機器人而言足夠,但BigDog這類以內(nèi)燃機為動力且需搭載較大負荷的機器人產(chǎn)品系統(tǒng)能耗高,能量的多次轉(zhuǎn)換、多環(huán)節(jié)傳遞造成了大能量損失,原有設(shè)計方案無法滿足。...

根據(jù)使用的數(shù)據(jù)RGB/Depth不同,又可以分為以下三類:基于RGB,基于RGB+Depth,和基于Depth。...

QMC5883P是一款三軸地磁傳感器,它將磁傳感器和信號處理電路集成在一個硅芯片上,產(chǎn)品外形尺寸為3×3×0.9mm3的LGA封裝。QMC5883P基于最先進的高分辨率磁阻技術(shù)。...

從上述影響機器人本體精度的動力學(xué)分析發(fā)現(xiàn),關(guān)節(jié)柔性也是重要影響因素之一。由于諧波減速器是柔性產(chǎn)品,關(guān)節(jié)柔性主要表現(xiàn)為諧波減速器的柔性即減速器的剛性值;諧波減速器的剛性越好,機器人本體精度越高。...
模塊化連接器Han DD Double Module可提供多達36個10A / 400V 的Han D型壓針電源連接點,同時Han Shielded Module Basic及Plus屏蔽模塊,滿載時可提供27個4A/32V的D-sub型壓針信號連接點。...
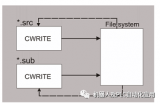
每次調(diào)用 EKI_CHECK() 時將調(diào)用程序 KRC:R1TPEthernetKRLEthernetKRL_USER.SRC。在該程序中可編程設(shè)定用戶特定的錯誤反應(yīng)。...
美國供應(yīng)鏈管理專業(yè)協(xié)會對AGV的定義:自動導(dǎo)引小車,是指裝備有電磁或光學(xué)等自動導(dǎo)引裝置,可以在規(guī)定的導(dǎo)航路徑上行駛,是具有安全保護以及各種移載功能的運輸小車。...

最近很多學(xué)員在學(xué)習(xí)機器人,在大多數(shù)的學(xué)員中是暫時還沒有現(xiàn)實的機器人作為直接學(xué)習(xí)的工具的。...

對 MOTOMAN 機器人的使用經(jīng)驗發(fā)現(xiàn),MOVL 指令的執(zhí)行,是在標(biāo)稱時間內(nèi)完成的(標(biāo)稱時間根據(jù)兩點間的距離和標(biāo)稱速度求得, =ts/v),也就說 MOVL 指令整個執(zhí)行時的加速、勻速和減速是在標(biāo)稱時間內(nèi)完成的。...

如何新增組輸出信號呢?在前面的步驟與組輸入信號一致,我們需要注意的是在選擇時選擇數(shù)字量輸出信號。...

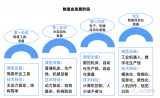
方案從總體要求、機器人產(chǎn)品體系、關(guān)鍵支撐能力、應(yīng)用示范、產(chǎn)業(yè)發(fā)展生態(tài)、產(chǎn)業(yè)空間布局和保障措施七大方面對北京機器人產(chǎn)業(yè)發(fā)展做出指導(dǎo)。...
機器人在工業(yè)生產(chǎn)中用于執(zhí)行重復(fù)、繁瑣或危險的任務(wù),如裝配、焊接、噴涂等。它們可以提高生產(chǎn)效率、減少錯誤率,并且能夠在惡劣環(huán)境下工作。...
機器人的控制方法不勝枚舉,本文以三菱PLC用CC-LINK方式控制機器人為例,簡單地講述一下通用控制步驟。 1.設(shè)置參數(shù) 主要設(shè)置好CC-LINK相關(guān)參數(shù)。 ①.PLC側(cè):設(shè)置站號、站類型(遠程設(shè)備站)、占用站數(shù)(占用4站)...
在園區(qū)物流領(lǐng)域,用于廠房間物料配送的室外移動機器人技術(shù)逐漸成熟,移動機器人廠商們瞄準(zhǔn)這一市場,推出了系列室外重載移動機器人及牽引式移動機器人,無人駕駛企業(yè)也紛紛入局,如倉擎智能、馭勢科技等企業(yè)的無人駕駛牽引車相繼落地。...

機器人發(fā)展到現(xiàn)在越來越受到人們的歡迎和重視,現(xiàn)在很多傳統(tǒng)行業(yè)都在生產(chǎn)作業(yè)中引入了工業(yè)機器人,隨著機器人的改進和優(yōu)化,工業(yè)機器人在傳統(tǒng)加工制造行業(yè)的重要性也越來越明顯。...
機器人在焊接過程中,需要嚴格按照焊接規(guī)程和焊接參數(shù)進行操作,以確保焊接質(zhì)量。焊接完成后,要對焊接部位進行檢查,以確保焊接質(zhì)量符合設(shè)計要求。...
關(guān)注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟技術(shù)開發(fā)區(qū)航空路6號手機智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1




