國產(chǎn)機器人主控芯片在“國產(chǎn)替代”的浪潮中以更低的價格和毫不遜色的性能逐漸取得了國內(nèi)機器人廠商的青睞。這一期我們繼續(xù)將目光聚焦在國產(chǎn)廠商,看看在機器人主控芯片國產(chǎn)替代浪潮中還有哪些不得不看的系列
2022-01-10 08:28:00 4837
4837 隨著智能化的程度提高,機器人傳感器應(yīng)用越來越多。智能機器人主要有交互機器人、傳感機器人和自主機器人3種。從擬人功能出發(fā),視覺、力覺、觸覺最為重要,早已進入實用階段,聽覺也有較大進展,其它還有嗅覺、味覺、滑覺等,對應(yīng)有多種傳感器,所以機器人傳感產(chǎn)業(yè)也形成了生產(chǎn)和科研力量。
2016-10-25 16:05:3413466 機器人元器件 機器人套件
2024-03-14 22:03:38
有沒有機器人比較全的資料
2017-03-21 12:35:21
請各位大神指導,移動式機器人是怎么做EMC保護的,機器人是鋰電池供電,所以就不能接大地了,那么對機器人的干擾是通過何種方式來釋放或轉(zhuǎn)移的?
2016-07-26 13:33:14
labview 視覺機器人抓取工件 CCD相機的二維坐標系的建立?希望分享,謝謝
2017-08-18 20:53:37
。機器人主要有兩大類:用于制造環(huán)境下的工業(yè)機器人和用于非制造環(huán)境下的服務(wù)機器人。工業(yè)機器人是一種對生產(chǎn)環(huán)境和生產(chǎn)條件
2021-09-01 06:45:48
如題,現(xiàn)在機器人發(fā)展越來越迅速,很多工廠都已經(jīng)由人轉(zhuǎn)為人機同進,我就是個做服務(wù)員的,估計再過幾年,,工作也會被搶 啊。。歡迎大家一起來說一說,機器人會搶走我們的工作么。。。很是憂桑。,。。。
2015-02-12 10:26:43
能針對處理對象,相應(yīng)地改變它的動作,諸如從眾多的物體中排除混入的物體,或在抓取物體時,能夠根據(jù)物體的位置和周圍的情況決定其操作。再有,對機器人自身的工作,只要具備某種感覺功能,感覺到有關(guān)其動作結(jié)果的信息
2018-01-03 17:09:03
感器(External Sensons)。下面將以此為主,結(jié)合機器人傳感器其它分類方法進行闡述。機器人產(chǎn)業(yè)近年來發(fā)展很快,2012年全球產(chǎn)量為16萬臺,歐、美、日等工業(yè)發(fā)達國...
2021-09-16 08:45:39
隨著智能化的程度提高,機器人傳感器應(yīng)用越來越多。智能機器人主要有交互機器人、傳感機器人和自主機器人3種。從擬人功能出發(fā),視覺、力覺、觸覺最為重要,早已進入實用階段,聽覺也有較大進展,其它還有嗅覺
2021-09-16 09:05:02
感器(External Sensons)。下面將以此為主,結(jié)合機器人傳感器其它分類方法進行闡述。 機器人產(chǎn)業(yè)近年來發(fā)展很快,2012年全球產(chǎn)量為16萬臺,歐、美、日等工業(yè)發(fā)達國家機器人市場已比較成熟,已處于平增長階段
2018-11-08 15:55:32
機器人的運動原理還是屬于最基本的簡單機械。機器人運動主要是依靠什么裝置?有些什么裝置是機器人用的比較多的?
2015-02-03 11:22:01
對不同物料進行快速的檢測、組裝。為了方便實訓教學,系統(tǒng)進行了專門的設(shè)計,可以完成各類機器人單項訓練和綜合性項目訓練,可完成各類機器人單項訓練和綜合性項目訓練。可以進行六軸機器人示教、定位、抓取、裝配等訓練
2021-07-01 08:20:18
ARM機械手臂有各種形狀和大小。機械臂是機器人的一部分,用來定位末端執(zhí)行器和傳感器來完成編程任務(wù)。許多(但不是全部)類似于人類的手臂,有肩膀,肘部,手腕,甚至手指。這給了機器人很多方法來定位它自己在它
2022-03-31 10:31:31
機器人的定義是什么?機器人優(yōu)點和缺點是什么?機器人是由哪些部分組成的?工業(yè)機器人的應(yīng)用有哪些?
2021-07-05 06:48:21
機器人的移動通常是從管理機器人總體任務(wù)進度的中央處理器發(fā)出位置變化請求時開始的。導航系統(tǒng)通過制定行程計劃或軌跡以開始執(zhí)行位置變化請求。行程計劃需考慮可用路徑、已知障礙位置、機器人能力及任何相關(guān)的任務(wù)目標。
2019-09-10 10:44:32
我們是不是在等待任務(wù)的下達,舵機是一個被驅(qū)動的控制器。為什么要分為機器人舵機,機器人舵機和其它的舵機有什么不同呢?其實也沒有多大的變化了,機器人舵機工作原理:也和上面說的差不多,機器人主板(控制器)通過
2014-08-22 23:25:37
響應(yīng)市場要求,加強在國際市場的競爭能力。 視覺是人類獲取信息最重要的來源。人看到一幅圖像,馬上能夠理解圖像的內(nèi)容和含義。然而,機器視覺并非易事。現(xiàn)有的機器人主要還是以壓力傳感器、位置傳感器等產(chǎn)業(yè)傳感器
2015-01-23 15:02:27
什么是PID控制?機器人設(shè)計中PID控制的編程方法是什么?
2021-06-30 06:53:20
哈爾濱首開機器人餐廳 生意爆棚2013年1月12日,哈爾濱市中央大街上有一家機器人為主題的餐廳。據(jù)了解,這家機器人主題餐廳營業(yè)半年來,顧客盈門,很受食客的歡迎。餐廳有煮水餃機器人、煮面機器人、炒菜
2014-07-26 09:11:04
有知道廣數(shù)或者珞石機器人的主控操作系統(tǒng)的嗎?做個小小的調(diào)查,可是一直沒問到,
2017-12-25 20:59:16
機器人行業(yè)需要什么計算機知識?進入機器人行業(yè)需要掌握哪些知識?
2021-09-18 09:33:36
KUKA庫卡C4機器人驅(qū)動器故障報警維修庫卡機器人維修內(nèi)容包括庫卡機器人示教器維修,KUKA伺服驅(qū)動模塊維修,庫卡機器人伺服電機維修,KUKA機械手PC工業(yè)電腦維修,庫卡機器人電路板維修,庫卡機器人主
2021-09-17 07:09:52
項目名稱:基于機器視覺的工業(yè)機器人抓取工作站試用計劃:申請理由本人是嘉興技師學院教師,浙江機器人有限公司技術(shù)顧問。在機器人領(lǐng)域有5年多的學習和開發(fā)經(jīng)驗,曾設(shè)參與多項工業(yè)機器人工作站的開發(fā)與調(diào)試
2019-09-18 14:18:14
對海底的東西進行抓取采樣,同時機器人身上攜帶的大量測量傳感器,可以對海水溫度、洋流速度、海底 光照強度等數(shù)據(jù)進行多點測量。
2015-06-25 18:02:34
,進而控制機器人運動,通過CAN通信和UWB進行信息交換,進而有全場絕對值定位功能,地盤加上東北大學的ACTION模塊,實現(xiàn)一般情況定位,最后加上六路電磁閥驅(qū)動,控制氣缸開端,實現(xiàn)抓取等動作。(此板為
2019-12-20 11:58:11
法5.2.4 概率路線圖方法5.2.5 RRT5.3 本章總結(jié)擴展閱讀習題第6章 機器人定位6.1 航跡推算6.1.1 機器人建模6.1.2 位姿估計6.2 使用地圖6.3 創(chuàng)建地圖6.4 定位并制圖······下載鏈接:`
2018-04-08 18:19:42
項目名稱:基于機器視覺的工業(yè)機器人抓取工作站試用計劃:申請理由 本人是嘉興技師學院教師,浙江機器人有限公司技術(shù)顧問。在機器人領(lǐng)域有5年多的學習和開發(fā)經(jīng)驗,曾設(shè)參與多項工業(yè)機器人工作站的開發(fā)與調(diào)試
2019-09-18 19:24:11
【作者】:杜要鋒;尹雪飛;陳克安;【來源】:《電聲技術(shù)》2010年02期【摘要】:時延估計是近場聲源定位領(lǐng)域中的一項關(guān)鍵技術(shù)。相位轉(zhuǎn)換廣義互相關(guān)時延估計方法(PHAT-GCC)由于其低的計算復雜度
2010-04-22 11:55:28
什么是機器人控制系統(tǒng)?機器人的運動控制系統(tǒng)包含哪些方面?機器人控制系統(tǒng)的基本功能有哪些?
2021-10-11 09:38:12
機器人按程序輸入方式區(qū)分有編程輸入型和示教輸入型兩類。編程輸入型是將計算機上已編好的作業(yè)程序文件,通過RS232串口或者以太網(wǎng)等通信方式傳送到機器人控制柜。示教輸入型的示教方法有兩種:一種是由操作者
2015-01-19 10:58:38
我今年大一計算機專業(yè) 想做那種清理垃圾機器人帶機械手臂的。。正在放寒假想學點東西準備一下但網(wǎng)上說的太籠統(tǒng) 而且網(wǎng)絡(luò)普遍都一樣的所以想請教一下 各位高機器人的我應(yīng)該從何學起 我們就算是一個隊伍吧一共8
2016-01-19 13:44:49
政策利好的形勢下,中國的機器人市場即將迎來全面性的爆發(fā)! 為了幫助廣大工程師朋友在未來的機器人“浪潮”中更好地把握機器人的設(shè)計精髓,本次特別分享了《超經(jīng)典的機器人技術(shù)開發(fā)與應(yīng)用手冊》和AI機器人開源資料,包含機器人關(guān)鍵技術(shù)解析及前沿應(yīng)用盤點,囊括眾多機器人電路圖設(shè)計和主流廠商解決方案。`
2018-10-11 14:52:29
大家有知道廣州數(shù)控的機器人的主控操作系統(tǒng)是基于什么做的嗎?還有珞石機器人?或者我去哪可以查到呢?想做個簡單的調(diào)查~謝謝
2017-12-25 20:57:12
工業(yè)機器人的四大特征是哪些?工業(yè)機器人是由哪些部分組成的?工業(yè)機器人是怎樣進行劃分的?
2021-10-11 09:10:17
分析實例七、軟體手柔性抓取控制與實驗Matlab與機器人的通訊方法設(shè)計機器人逆運動學求解視覺處理方法設(shè)計八、剛?cè)彳?b class="flag-6" style="color: red">機器人變剛度方法與控制離散型剛性關(guān)節(jié)變剛度方法軟體機器人變剛度方法變剛度軟體機械手的位移
2021-09-02 11:17:25
工作站調(diào)試維護,操作編程等綜合素質(zhì)較強的技術(shù)人才。 三、就讀工業(yè)機器人技術(shù)專業(yè)的優(yōu)勢1、工業(yè)機器人專業(yè)是順應(yīng)時代發(fā)展的先進科技技術(shù),前景無限。類似10年前數(shù)控技術(shù)的應(yīng)用,今天基本普及為先進制造業(yè)的主流
2015-09-02 14:03:18
上手的使用方法。據(jù)預(yù)測,協(xié)作機器人從2015年到2020年會增長十倍,市值從2014年的9500萬美元漲到10億美元,而輕量級機器人會在兩年內(nèi)大受歡迎,價格降到1.5到2萬美元。分析公司
2018-10-12 11:02:18
注重安全裝置。如何保障桁架機器人的安全1.承重極限保護裝置:當機器人抓取超重的工件時,機器人發(fā)出報警,嚴重超重時安全閥打開,防止發(fā)生危險;2.斷氣保護裝置:采用單向閥和儲氣罐,確保機器人突然斷氣后不會
2018-09-29 12:08:34
表達了對機器人開發(fā)中傳統(tǒng)嵌入式方法的顧慮;美國國防部地面機器人和自主系統(tǒng)主管Ellen Purdy關(guān)注于自主系統(tǒng)的進一步標準化和持久性(電池能力)需要;韓國浦項智能機器人研究所的Hee Chang
2019-07-31 07:17:18
的問題,運行起來必然高效自如。大家還知道其他關(guān)于機器人線束連接可靠的方法么?或者說確保機器人質(zhì)量性能的有效方法和制造模式等等。有興趣的都可以在這里分享,歡迎各位一起參與討論~ `
2017-04-25 16:34:23
:81328832下載地址:https://bbs.usoftchina.com/thread-203794-1-1.html基于互聯(lián)網(wǎng) 的智能機器人管家_論文:該項目是基于嵌入式開發(fā)平臺的機器人,這個機器人主
2019-10-09 20:32:08
人工智能技術(shù)的發(fā)展,國內(nèi)市場上也出現(xiàn)了各種智能硬件產(chǎn)品,如機器人,產(chǎn)品實用領(lǐng)域涵蓋生活的方方面面。目前推向市場的機器人主要包括兩類:工業(yè)機器人和家用服務(wù)型機器人。工業(yè)機器人主要以機械臂為首領(lǐng)的科學制造,將
2015-08-10 18:16:12
、抓取、裝配、入庫等訓練,2、工業(yè)機器人與視覺實訓平臺包含六自由度工業(yè)機器人、智能視覺檢測系統(tǒng)、PLC控制系
2021-07-01 06:38:35
及以太網(wǎng)的聯(lián)網(wǎng)功能。可用于機器人控制器之間和機器人控制器同上位機的通訊,便于對機器人生產(chǎn)線進行監(jiān)控、診斷和管理。 工業(yè)機器人主要用于汽車、電子行業(yè),這兩個行業(yè)占比達到59%,其中汽車行業(yè)機器人的密度已經(jīng)成為衡量一個國家智能化水平的重要指標。`
2018-11-23 10:40:38
我想做一個語音控制的機器人主控芯片是51,可是語音控制用什么芯片比較好呢,不知道淘寶上有沒有賣語音控制的集成模塊
2016-02-12 22:40:00
機器人聽覺系統(tǒng)主要是對人的聲音進行語音識別并做出判斷,然后輸出相應(yīng)的動作指令控制頭部和手臂的動作,傳統(tǒng)的機器人聽覺系統(tǒng)一般是以PC機為平臺對機器人進行控制,其特點是用一臺計算機作為機器人的信息處理
2019-08-30 08:23:42
用于葉片打磨的機器人,有專用的工藝包嗎?
2015-03-07 01:05:14
關(guān)于ros智能機器人,就是一個寫智能機器人代碼的一個虛擬機,
2021-10-13 19:20:16
一、項目說明 在21世紀的今天,勞動力成本已經(jīng)越來越貴,如何提高生產(chǎn)效率同時降低生產(chǎn)成本已經(jīng)成為世界最主流的研究課題了。基于這個課題,我們設(shè)計了智能配送裝配機器人
2013-10-24 16:34:25
20世紀以來隨著電子技術(shù)的不斷發(fā)展,以及人類對于自身的不斷了解,機器人的研究也在不斷的深入。現(xiàn)階段能做出外表接近人類的機器人,走路接近人類的機器人……但這些都屬于很前沿的領(lǐng)域,研究門檻高,實際的商業(yè)用途不是很廣,所以大多還停留在樣品階段,走進市場的很少。
2019-10-16 08:27:30
我是新人,求幫助啊,明天需要提交輪式機器人應(yīng)用的報告,求大神給點建議,可用輪式機器人應(yīng)用于那些方面,要求實際可行,應(yīng)用于生活,農(nóng)業(yè),軍事都可以,謝謝啦
2013-04-17 16:32:16
,人類友好型機器人開始在實體店進行實時盤點,這使得超市能夠減少每種產(chǎn)品的貨架空間,并增加給定時間內(nèi)可以攜帶的庫存量。輪式機器人甚至可以進軍賓館,提供從入住到客房服務(wù)的接待服務(wù)。 對于這些輪式機器人來說
2022-11-09 07:49:49
以軟體機器人為背景和主題,深入講解:(1) 軟體機器人的關(guān)節(jié)設(shè)計方法;(2) 有限元分析技巧;(3) 力學模型的建立方法; (4) 基于MATLAB與視覺識別技術(shù)的軟體手柔性抓取控制與實驗等內(nèi)容
2019-08-12 15:09:17
江智暖心機器人主要服務(wù)于少兒學習教育以及老年人康養(yǎng)領(lǐng)域
2022-03-22 08:00:05
江智室外非道路多場景機器人主要用于變電站 d大型公園 d大型社區(qū) d大型工業(yè)園等場景客戶的不同要求定制服務(wù)
2022-05-02 09:32:10
深圳泰科智能TB6-R5協(xié)作機器人是一款靈活的輕型工業(yè)協(xié)作機器人,具有精巧的機械結(jié)構(gòu)設(shè)計。這款協(xié)作機器人有效負載為5KG,自重僅為23KG,重復定位精度可達±0.05mm,適應(yīng)多樣性、柔性生產(chǎn)
2023-04-17 15:57:13
基于ARM微控制器的醫(yī)療機器人主從夾持控制系統(tǒng)設(shè)計與實現(xiàn)
2015-12-23 14:59:51 34
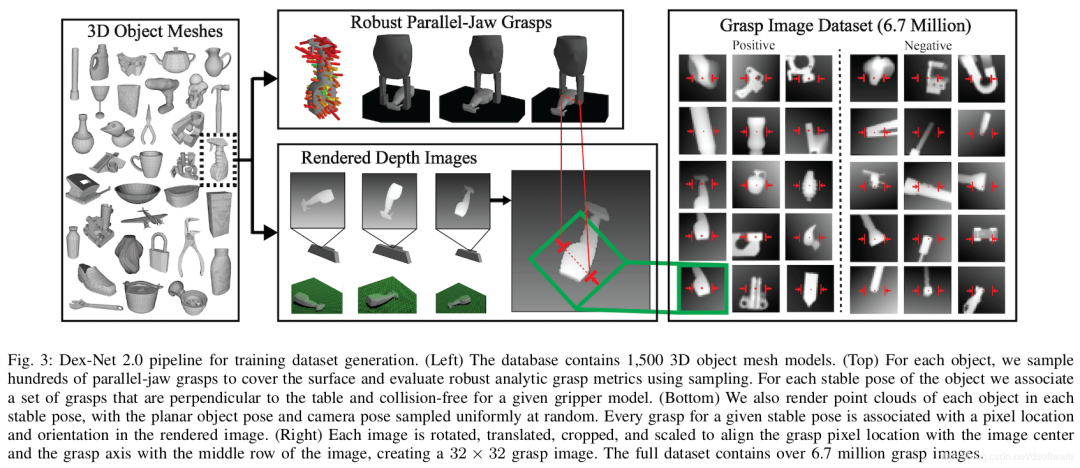
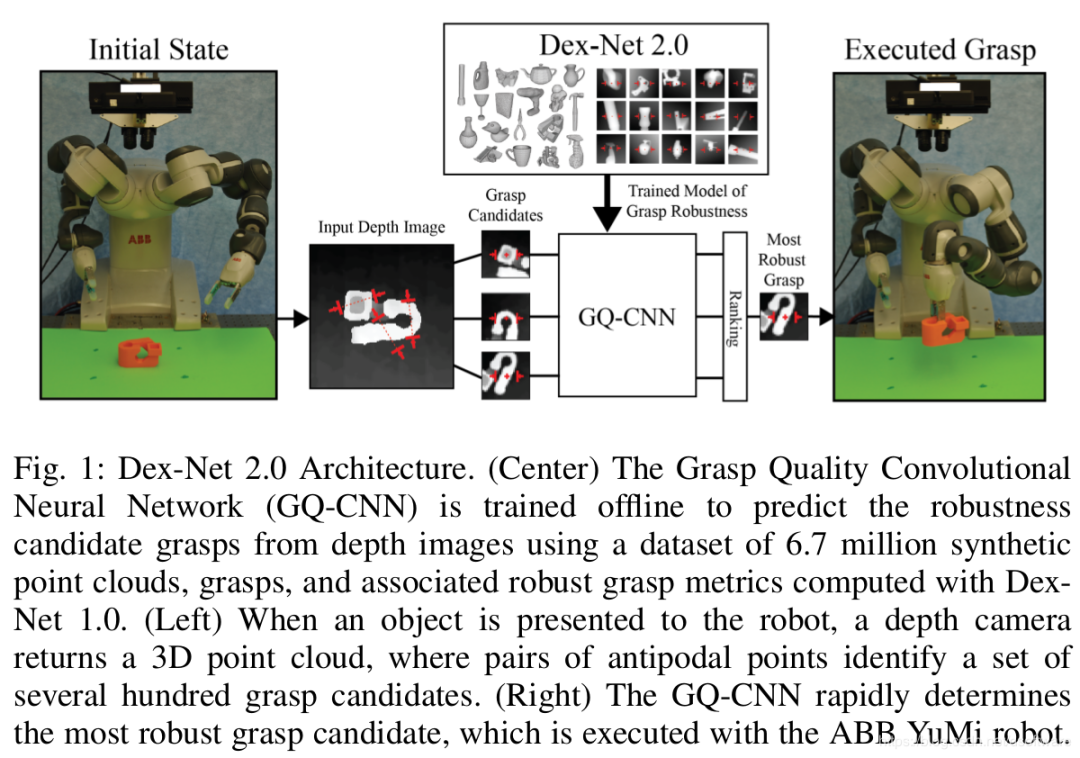
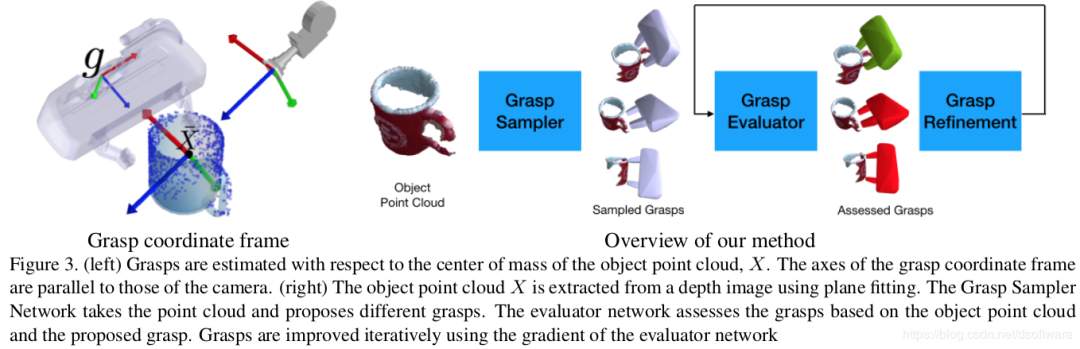
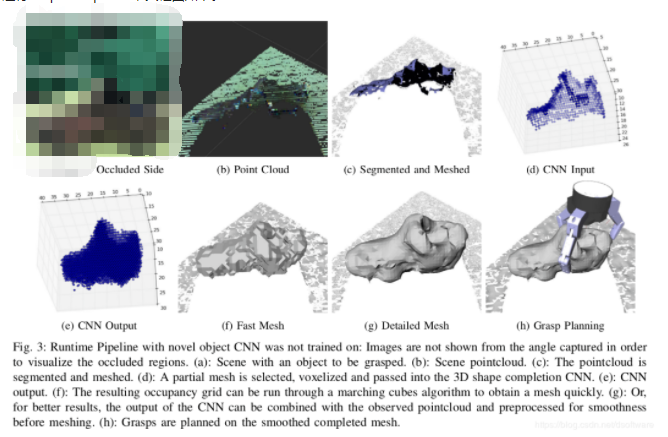
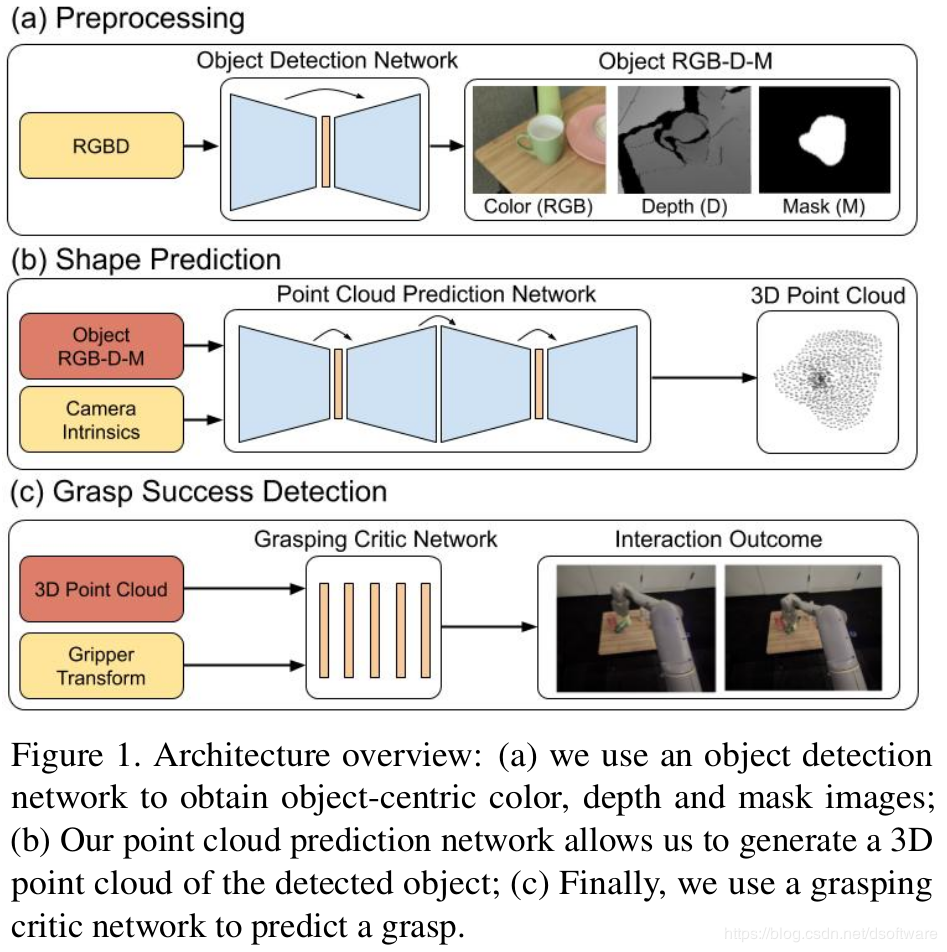
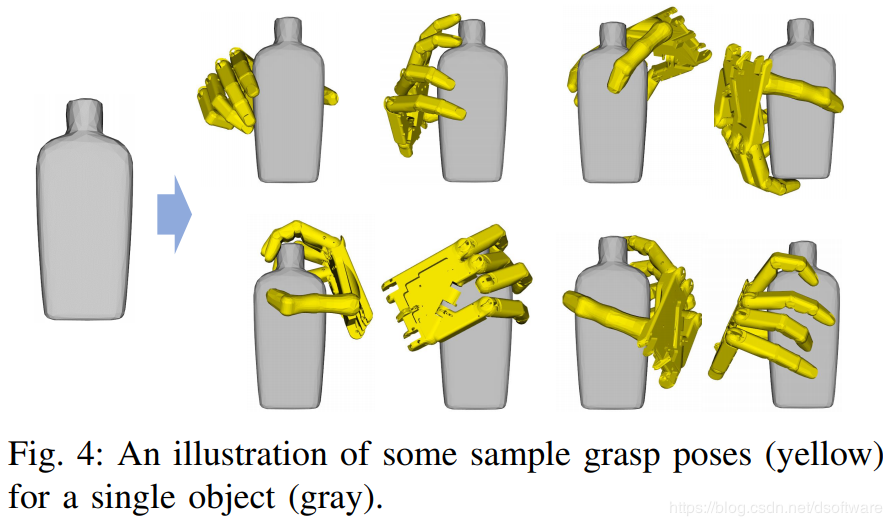
34 最近兩天參觀了華為的自動化工廠,了解到機器人抓取在工業(yè)中的應(yīng)用以及未來的前景,備受鼓舞。作為一個搞機器人抓取(grasping)接近八年的老grasper,覺得還是可以寫寫機器人抓取的前世今生
2017-09-20 09:21:313 目前,全球機器人主要市場以工業(yè)機器人為主,占市場份額80%。然而從未來趨勢看,服務(wù)機器人將成為熱點。2016年更有不斷有各種新型的服務(wù)機器人出爐,下面是小編盤點的幾款2016新型服務(wù)機器人。 智能
2018-04-02 15:16:006896 RM機器人主控系統(tǒng)程序
2018-04-18 17:13:244 接下來是仿真環(huán)境到真實環(huán)境的遷移問題。由于真實機器人實驗不方便并且實驗成本很高,使得從仿真遷移到真實成為一種幾乎必然的選擇 (Google那種機器人農(nóng)場的方法畢竟不是每個人都能干的),因此很多研究
2018-08-11 10:49:377139 “ 隨著智能化的程度提高,機器人傳感器應(yīng)用越來越多。智能機器人主要有交互機器人、傳感機器人和自主機器人3種。
2018-09-21 10:56:307296 根據(jù)國外媒體的報道,研究人員最近研發(fā)出一款新型機器人,該款機器人可以迅速抓取任何不規(guī)則形狀的物體。該款被命名為Dex Net 2.0的敏捷機器人,深入的研究了虛擬圖書館數(shù)據(jù)庫中10000個具備
2018-10-09 08:58:581453 據(jù)消息報道,一周前,英國完成了首例由機器人主刀的癌癥手術(shù),患者在手術(shù)中成功摘除了受癌細胞感染的多個器官,術(shù)后創(chuàng)口僅5厘米。
2018-10-20 07:20:001286 通常來講,機器人編程可分為示教在線編程和離線編程。我們今天講解的重點是離線編程,通過示教在線編程在實際應(yīng)用中主要存在的問題,來說說機器人離線編程軟件的優(yōu)勢和主流編程軟件的功能、優(yōu)缺點進行深度解析
2019-01-01 11:21:003211 
近日,北卡羅萊納州立大學的研究人員發(fā)明了3D打印的柔性網(wǎng)狀機器人,因其柔軟的外形,又叫做軟機器人。這種軟機器人的結(jié)構(gòu)可以通過施加磁場來控制,從而漂浮在水面上。它們可以在水面上抓取小物體,所以有潛力模仿生活在水面上的生物。
2019-01-25 10:28:18486 機器人抓取一直是業(yè)界的一大難題,最近,澳大利亞昆士蘭科技大學的機器人學家們開發(fā)出了一種新的方法,讓機器人可以更快、更準確地抓取物體,包括混亂和多變的環(huán)境中,這可能會提高其在工業(yè)和家庭環(huán)境中的實用性。
2019-01-30 11:27:02722 人工智能的發(fā)展成為趨勢已是必然,機器人領(lǐng)域也將隨之大放異彩,那么在機器人領(lǐng)域有哪些核心技術(shù)呢?今天我們就來盤點下機器人領(lǐng)域的10項核心技術(shù)。
2019-02-12 10:36:292630 本文主要研究3D視覺技術(shù)在機器人抓取作業(yè)中的應(yīng)用,總結(jié)了3D視覺技術(shù)在識別、定位物體時面臨的挑戰(zhàn),給出了抓取作業(yè)機器人3D視覺系統(tǒng)的設(shè)計方法。
2019-07-25 08:43:106744 工業(yè)機器人一般應(yīng)用在工業(yè)制造上,汽車制造、電器、食品等,能代替重復機械式操作工作,效率高,是靠自身動力和控制能力來實現(xiàn)各種功能的一種機器。它可以接受人類指揮,也可以按照預(yù)先編排的程序運行。現(xiàn)在我們介紹工業(yè)機器人主要組成部分。
2019-07-27 09:10:0955361 在餐廳、酒店、商場等服務(wù)場所,我們已能看到一些自主行走的服務(wù)機器人,他們能做到自主路徑規(guī)劃、自動避開障礙物等功能,這主要得益于機器人定位導航技術(shù)的進步。在實現(xiàn)機器人導航方法中,目前主要有激光SLAM
2019-08-05 13:52:3010559 Romeo BLE Quad 藍牙四驅(qū)機器人主控器是一款基于32位ARM處理器開發(fā)的機器人主控器,集成BLE藍牙4.0和四路電機驅(qū)動,兼容Arduino IDE開發(fā)環(huán)境。
2020-01-03 14:15:011187 
本文檔的主要內(nèi)容詳細介紹的是ZYSTM32-A0智能機器人主板的電路原理圖免費下載。
2019-12-06 14:22:54113 如果機器人要拿起一個物體并將其放進一個容器里。首先,機器人需要觀察物體,在6D空間中決定抓取器的移動位置。
2020-03-02 09:25:48656 據(jù)外媒報道,谷歌前機器人主管Aaron Edsinger博士帶領(lǐng)一個團隊秘密研發(fā)一種機器人,在過去3年中,他們研發(fā)了輔助機器人Hello Robot。現(xiàn)在,這款機器人已經(jīng)從較為低調(diào)的隱形狀態(tài)改變?yōu)閷ν庹故境鏊牡谝粋€成果——延伸研究版(Stretch Research Edition)。
2020-07-17 14:29:29631 目前,市場上應(yīng)用最廣泛的機器人是工業(yè)機器人,也是最成熟、最完善的一種。工業(yè)機器人的應(yīng)用十分廣泛,因為它有多種控制方法。根據(jù)不同的任務(wù),可以分為四種控制方法:點控制法、連續(xù)軌跡控制法、力控制法和智能控制法。
2020-07-30 16:24:519713 魷魚機器人主要由丙烯酸聚合物等軟材料制成,具有剛性、3D打印和激光切割部件。在水下探索中使用軟機器人對保護魚類和珊瑚很重要,因為剛性機器人可能會傷害魚類和珊瑚。但是,軟機器人往往移動緩慢,難以操縱。
2020-10-11 09:41:192233 機器人作為面向未來的智能制造重點技術(shù),其具有可控性強、靈活性高以及配置柔性等優(yōu)勢,被廣泛的應(yīng)用于零件加工、協(xié)同搬運、物體抓取與部件裝配等領(lǐng)域,如圖1-1所示。然而,傳統(tǒng)機器人系統(tǒng)大多都是在結(jié)構(gòu)化環(huán)境中,通過離線編程的方式進行單一重復作業(yè),已經(jīng)無法滿足人們在生產(chǎn)與生活中日益提升的智能化需求。
2020-10-23 11:32:136511 
的三維坐標,采用坐標轉(zhuǎn)換方法將目標物體的位置坐標信息實時轉(zhuǎn)換至機器人全局坐標系,并研究相機坐標系、機器人全局坐標系與末端執(zhí)行器手爪工具坐標系三者的動態(tài)映射關(guān)系,實現(xiàn)排爆機器人的自主抓取。實驗結(jié)果表明,與傳統(tǒng)固
2021-03-12 15:19:2123 時間的數(shù)理難題,用智能系統(tǒng)處理起來就顯得十分容易,但在幾乎不需要思考的情況下就能做出的分選動作,則是全世界機機器人研究專家關(guān)注的熱點。 機械臂抓取需要確定每段機械臂的位姿 首先,機械臂需要視覺伺服系統(tǒng),來確定物
2021-03-29 15:16:282473 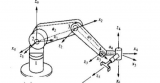
機器人越來越多地成為人類工作和生活的好助手。雙贊主板應(yīng)用的機器人在3C行業(yè)、食品制造和醫(yī)藥行業(yè)、陶瓷衛(wèi)浴、物流倉儲、塑膠行業(yè)等行業(yè)廣泛運用。 作為機器人的核心——主板,一直是機器人開發(fā)的重點。機器人主
2021-10-25 17:54:162335 側(cè)圍外板是一個整體件,用一個相機照車身B柱是沒有問題的.整體大件由于不需要搭接工藝,因此可以使用一個相機和定位銷定位抓取的方法
2022-04-20 15:18:541103 抓取綜合方法是機器人抓取問題的核心,因為它涉及到在物體中尋找最佳抓取點的任務(wù)。這些是夾持器必須與物體接觸的點,以確保外力的作用不會導致物體不穩(wěn)定,并滿足一組抓取任務(wù)的相關(guān)標準。
2022-05-07 15:38:142564 替代傳統(tǒng)的工裝夾具,協(xié)助機器人高效準確地完成3D智能抓取
2022-08-02 11:34:392041 
提高工業(yè)機器人軌跡精度很大的一部分原因就是為了滿足現(xiàn)階段國產(chǎn)機器人的發(fā)展需求。 在2018年之前,國產(chǎn)工業(yè)機器人主要的集中于搬運、上下料、分揀、焊接等應(yīng)用領(lǐng)域,國產(chǎn)機器人主要是點到點的運動方式,對工業(yè)機器人軌跡運動要求不高,能夠滿足當時的客戶需求。
2022-10-31 17:53:222028 焊接機器人編程方法有什么?所謂焊接機器人是從事焊接的工業(yè)機器人,廣泛應(yīng)用于汽車制造、造船、航空等領(lǐng)域。使用機器人時,首先要做好編程,使機器人能夠按照既定的程序完成各種操作。焊接機器人主要有示教編程法、離線編程法、自主編程法三種。
2023-01-13 10:47:0111710 
確定移動機器人的狀態(tài)是機器人導航系統(tǒng)中重要的組成部分。在本文中,我們提出了一種使用2D激光雷達在室內(nèi)場景下估計機器人姿態(tài)的方法,并探討了如何將新型的場景表示模型整合到標準蒙特卡羅定位(MCL)系統(tǒng)中。
2023-02-08 09:46:061230 機器人視覺抓取的目的是使用一個機械手模型(包括二指或多指夾爪,吸盤等),以RGB或RGBD相機采集的場景圖像為輸入計算出一個最優(yōu)的抓取位姿,使機械手在該位姿下可以穩(wěn)定地抓取模型已知或未知的物體。
2023-03-30 10:19:29476 抓取機器人需要對物體進行高精度、高速度的抓取和放置,因此需要使用高性能的伺服電機來實現(xiàn)精準的運動控制。相比于其他類型的電機,伺服電機具有以下優(yōu)點,適合應(yīng)用于抓取機器人中: 1、伺服電機可以實現(xiàn)高精度
2023-06-15 09:15:02377 人形機器人未來社會發(fā)展。 “人形機器人是未來的必然趨勢。奧比中光希望與各家機器人企業(yè)一起努力,把機器人視覺、本體做好,讓機器人為人類更好地服務(wù)。”黃源浩說。 談行業(yè)趨勢 人形機器人或?qū)⒊蔀槲磥?b class="flag-6" style="color: red">機器人主流?? WAIC 2023由上海市政府和國家發(fā)
2023-07-08 09:49:02695 抓取綜合方法是機器人抓取問題的核心,本文從抓取檢測、視覺伺服和動態(tài)抓取等角度進行討論,提出了多種抓取方法。各位對機器人識別抓取感興趣的小伙伴,一定要來看一看!千萬別錯過~
2023-08-19 17:19:46926 
經(jīng)過以上對移動抓取機器人系統(tǒng)詳細的剖析,我們可以知道移動抓取機器人系統(tǒng)并不是簡單的“堆料”,而是以移動底盤的智能路徑規(guī)劃、視覺識別、移動底盤與抓取系統(tǒng)、多傳感器融合為核心的高度復雜的機器人系統(tǒng)。
2023-12-19 15:09:03264 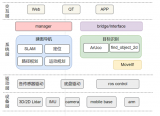
 電子發(fā)燒友App
電子發(fā)燒友App













 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論