完善資料讓更多小伙伴認(rèn)識你,還能領(lǐng)取20積分哦,立即完善>
電子發(fā)燒友網(wǎng)技術(shù)文庫為您提供最新技術(shù)文章,最實(shí)用的電子技術(shù)文章,是您了解電子技術(shù)動(dòng)態(tài)的最佳平臺(tái)。
選擇和使用磁吸附爬壁機(jī)器人時(shí),需要根據(jù)具體應(yīng)用的需求和安全性要求來評估和確定其適用的載重能力。最好參考機(jī)器人制造商提供的技術(shù)規(guī)格和建議,以獲取準(zhǔn)確的載重能力信息。...
常見的機(jī)器人視覺伺服中要實(shí)現(xiàn)像素坐標(biāo)與實(shí)際坐標(biāo)的轉(zhuǎn)換,首先就要進(jìn)行標(biāo)定,對于實(shí)現(xiàn)視覺伺服控制,這里的標(biāo)定不僅包括攝像機(jī)標(biāo)定,也包括機(jī)器人系統(tǒng)的手眼標(biāo)定。...

工程師們一直在試圖搭建更智能、可靠的機(jī)器人,比如之前火爆全網(wǎng)、來自波士頓動(dòng)力公司的機(jī)器狗Spot。它可以輕松上下樓梯、搬運(yùn)重物、巡查街道,等等。...

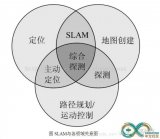
正如圖中所示,機(jī)器人自主定位導(dǎo)航技術(shù)中包括:定位和地圖創(chuàng)建(SLAM)與路徑規(guī)劃和運(yùn)動(dòng)控制兩個(gè)部分,而SLAM本身只是完成機(jī)器人的定位和地圖創(chuàng)建,二者有所區(qū)別。...
為了讓機(jī)器人成功跳躍和著陸,我們需要開發(fā)能夠適應(yīng)機(jī)器人整體重量和動(dòng)力學(xué)的控制算法。這不再是仔細(xì)衡量機(jī)器人邁出的每一步,而是以一種非常強(qiáng)大的方式協(xié)調(diào)機(jī)器人整體移動(dòng)的重量。...
激光雷達(dá)與純視覺方案的演繹。自動(dòng)駕駛具有視覺主導(dǎo)和激光雷達(dá)主導(dǎo) 兩種主流技術(shù)路徑。特斯拉推出的擎天柱沿用了純視覺方案,其測距算 法的關(guān)鍵在于用攝像頭的數(shù)據(jù)生成類激光雷達(dá)的點(diǎn)云數(shù)據(jù)。...
施耐德電氣全新Lexium Cobot協(xié)作機(jī)器人是一款高效、先進(jìn)的機(jī)器人系統(tǒng),具有編程簡單、安裝快捷、易使用和易培訓(xùn)等特性,其僅需細(xì)微改動(dòng)現(xiàn)有生產(chǎn)布局便可落地安裝,并能便捷安裝和集成至一個(gè)完整的機(jī)器人系統(tǒng)中。...
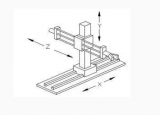
發(fā)那科的標(biāo)準(zhǔn)產(chǎn)品直線七軸主要用于熱沖壓行業(yè),安裝后外觀如下圖所示,其常用機(jī)型為M-900iA/200P,本文將以該型號機(jī)器人為例介紹直線七軸的軟件配置,其余機(jī)型配置請?jiān)斣兩虾0l(fā)那科。...
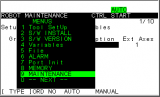
用 CONTINUE 可防止將在下面的程序行中出現(xiàn)的預(yù)進(jìn)停止。...
機(jī)器人的定義范圍很廣,大到工廠服務(wù)的工業(yè)機(jī)器人,小到居家打掃機(jī)器人。按照目前最寬泛的定義,如果某樣?xùn)|西被許多人認(rèn)為是機(jī)器人,那么它就是機(jī)器人。...
節(jié)卡機(jī)器人是一種能夠輔助人們管理日常開銷和預(yù)算的智能機(jī)器人。它可以通過記錄和分析個(gè)人的消費(fèi)行為、幫助制定預(yù)算、提供理財(cái)建議等方式,幫助用戶更好地控制和管理自己的金融狀況。...
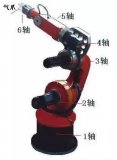
近年來,跨國機(jī)器人巨頭們紛紛推出七軸工業(yè)機(jī)器人,以搶占高端新市場,這引發(fā)了我們對于七軸工業(yè)機(jī)器人的深入思考,...
爬壁機(jī)器人是一種可以在垂直或近垂直表面上移動(dòng)和操作的機(jī)器人。它們被設(shè)計(jì)用于執(zhí)行特定任務(wù),例如在建筑物外墻進(jìn)行清潔、在工廠內(nèi)部的管道進(jìn)行檢測和維護(hù),或在危險(xiǎn)的環(huán)境中進(jìn)行探索等。...
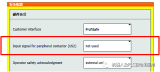
當(dāng)接口帶負(fù)載電壓 US1/US2 時(shí),負(fù)載電壓US1 未接,US2 通過安全技術(shù)連接,由此可在驅(qū)動(dòng)裝置關(guān)閉時(shí)關(guān)斷執(zhí)行器。...
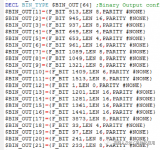
數(shù)值范圍取決于機(jī)床數(shù)據(jù)中二進(jìn)制輸出 $BIN_OUT[...] 的配置(文件 ...STEU\Mada\$custom.dat 中的變量)。...
避障是指移動(dòng)機(jī)器人在行走過程中,通過傳感器感知到在其規(guī)劃路線上存在靜態(tài)或動(dòng)態(tài)障礙物時(shí),按照 一定的算法實(shí)時(shí)更新路徑,繞過障礙物,最后達(dá)到目標(biāo)點(diǎn)。...

減速機(jī)是連接動(dòng)力源與執(zhí)行機(jī)構(gòu)之間的傳動(dòng)機(jī)構(gòu),能將馬達(dá)的轉(zhuǎn)速降低,并讓轉(zhuǎn)矩提升。其將電動(dòng)機(jī)、內(nèi)燃機(jī)等高速運(yùn)轉(zhuǎn)的動(dòng)力,透過輸入軸上的小齒輪嚙合后,再輸出至軸上的大齒輪以達(dá)到減速的目的,并藉此傳遞更大的力矩。...
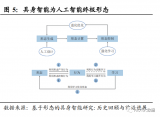
,人形機(jī)器人的研究的意義在于:1. 開發(fā)最適應(yīng)人類社會(huì)的機(jī)器人形態(tài),實(shí)現(xiàn)終極機(jī)器替人,但場景需要新的突破;2. 人形對軟硬件復(fù)合技術(shù)的要求極高,奔著人形做研發(fā)的機(jī)器人公司能掌握最全面的技術(shù)棧。...

如果你快速進(jìn)行百度搜索,你會(huì)發(fā)現(xiàn)很多不同的答案。分析響應(yīng)得出一個(gè)共同的主題——執(zhí)行器是一種使物體移動(dòng)或操作的設(shè)備。...
所有 4 個(gè)基本計(jì)算種類在 KRL 中都允許。...
關(guān)注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟(jì)技術(shù)開發(fā)區(qū)航空路6號手機(jī)智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1




