完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
電子發燒友網技術文庫為您提供最新技術文章,最實用的電子技術文章,是您了解電子技術動態的最佳平臺。
要知道Tesla Bot并非首款人形機器人,從21世紀初本田發布首款人形機器人AISMO原型機開始,全球多家科技公司及高校先后發布人形機器人。其中,較為知名的不乏有波士頓(BSX.US)的Atlas機器人、歐洲iCUB、軟銀的Pepper、Alderbran公司的Nao機器人,以及優必選Walker...

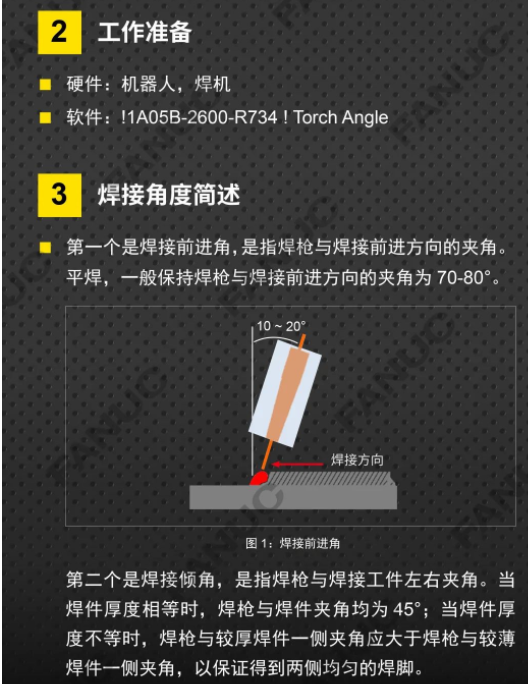
焊接姿態,尤其是焊接時的前進角和焊接傾角是影響焊接質量的兩個重要因素。本文介紹的“TorchAngle“功能,機器人可以適時計算出當前的焊接前進角和焊接傾角,適時地顯示當前的兩個焊接角度,為焊槍角度的調整和焊接工藝優化方向提供數據基礎。...
利用左相機平面和右相機平面去計算R、T。通常做slam的時候,先需要對圖像中的對應點進行匹配,然后利用至少八個對應點去利用SVD來求解出外參矩陣,再利用這個外參矩陣進行分解得到R、T,得到兩個相機的相對位姿之后,就可以得到對應三維點的坐標。...
材料的低溫適應性:AGV需要適應極端低溫環境,確保其電子組件和機械部件正常運行。尤其是結構和剎車等部件上,首先要考慮材料的低溫環境適應性,具備足夠的耐寒性和抗凍裂性。...

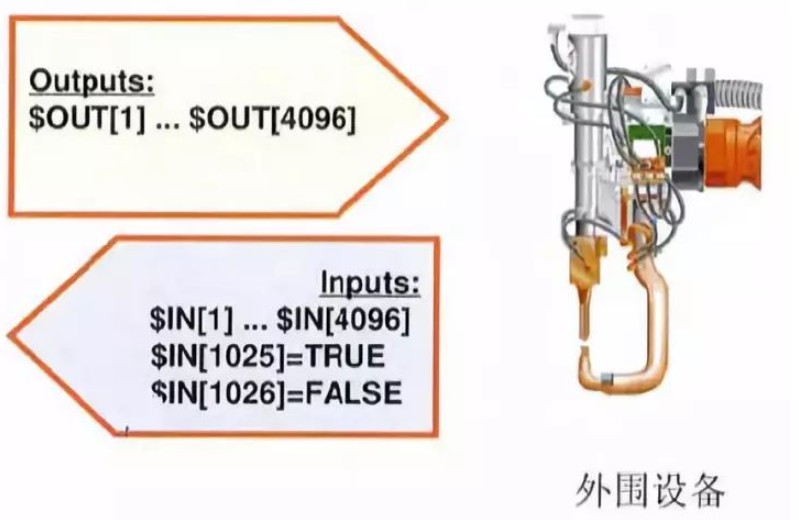
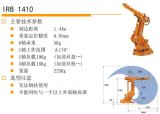
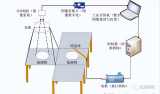
本文采用的PLC為S7-300 CPU317-2PN/DP,FANUC機器人型號為,以PLC為主站,FANUC機器人為從站,通過DP線連接。FANUC機器人的PROFIBUS-DP通訊板卡處連接如下圖所示。...

協助機器人和工業機器人并沒有嚴格的界限,有些協助機器人可能具備一定的工業機器人功能,而一些工業機器人也可以通過安全措施實現與人類的協同工作。因此,在具體的應用場景中,根據需要和要求,可以選擇適合的機器人來實現自動化任務。...
在一般作動器里面使用制動器作為一種斷電后的保護設計,但是在Teslabot中我們看到了機械離合器的設計(Mechanical Clutch)。雖然很多電動制動器和電動離合器在結構上就是近親,電動離合器有時就是制動器在結構上稍有變化而已,但是這次Teslabot里面使用離合器而不是制動器,讓我好奇它的...

一位搬家師傅介紹:“這個設備,能讓我肩部稍微輕松一點,膝蓋不用用力,只要你一抬腿,它就能助你的力”。 就使用體驗而言,搬家師傅們穿上這套設備,可以很從容地搬一些大件物品上樓,在應對沒有安裝電梯的老舊小區時,非常實用。...
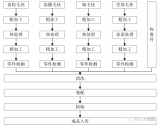
機器人焊接系統基本組成: 1、弧焊機器人 2、焊機+送絲機 3、焊槍及清槍裝置 4、保護氣體設備 5、工作臺、工裝夾具、變位機 6、安全系統(圍欄、光柵、自動門、門鎖等) 7、排煙系統...
所以在掃地機器人的研發生產中,就需要測試了解掃地機器人在工作時的各項參數數據,傳統的單臺數據采集儀是無法固定安裝在較小體積的掃地機上面的,而且測試的數據也無法實時收集并查看,這給測試帶來的很多不便。...

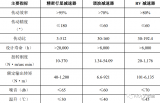
行星齒輪傳動機構主要由行星齒輪、行星架和太陽輪構成的行星齒輪傳動機構。行星齒輪傳動結構是傳動效率最高的齒輪傳動結構。...
減速器在光伏設備領域主要用于回轉驅動系統中。采用回轉驅動為旋轉部件的太陽能光伏組件,可根據一天中太陽不同的位置來對主機的轉角及仰角進行精確的調整。精密行星減速器能有效保證設備的跟蹤精度,并且具有扭矩大、壽命長、防護等級高等特點。...
這里的“軟”意思是:加工性能好,并不代表一定要比工件的硬度低。對于大批量的生產,軟爪的硬度會對加工的穩定性產生很大的影響,選擇比工件硬度高的軟爪材料,不僅會提高軟爪的使用壽命,對加工的穩定性也會有積極的影響。...

使用機器人來使制造過程自動化有無數好處,但是,請務必記住,每種解決方案都存在網絡安全風險,從協作式機器人編程到傳感器收集的數據,存在很多需要保護的信息。...
定位在移動機器人導航系統中起著至關重要的作用,是自主移動的基本能力。在室內環境中,當前主流的定位方案使用2D激光雷達,利用即時定位和建圖(SLAM)技術來構建占據柵格地圖;然后,基于已知的地圖來定位。...
同樣在車間入冬初期,車間空調未開啟,車間環境溫度低于10℃以下,尤其在上午線體開啟期間,KUKA機器人頻繁報“超過最大滯后誤差(X)”(如圖2所示,X為機器人或附屬機械關節軸,KSP為KUKA SERVO PACK,1為第一軸的伺服控制)。...

工業相機是機器視覺設備中價值量最高的組件(占比23%),由圖像傳感器、圖像采集卡、各類芯片組成,技術壁壘較高。...
關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1




