相機(jī)、ID讀碼器等;板卡:黑白采集卡、圖像壓縮/解壓板卡、彩色采集卡等;軟件包:圖像處理軟件、機(jī)器視覺(jué)工具軟件;配件:工業(yè)相機(jī)、CMOS相機(jī)、CCD相機(jī)、面陣相機(jī)、CAMERA-LINK相機(jī)、行掃描相機(jī)
2018-04-24 17:53:09
;輔助產(chǎn)品:傳感器、標(biāo)定塊、光柵、墊圈、連線及連接器、電源、底板。機(jī)器視覺(jué)輔件圖像處理系統(tǒng):光學(xué)文字、識(shí)別系統(tǒng)、自動(dòng)化/機(jī)器人技術(shù)、紅外圖像系統(tǒng);機(jī)器視覺(jué)集成:字符處理和識(shí)別系統(tǒng)、自動(dòng)化/機(jī)器人技術(shù)
2018-10-13 11:05:48
的優(yōu)點(diǎn)是結(jié)構(gòu)簡(jiǎn)單、相機(jī)標(biāo)定容易,同時(shí)還避免了立體視覺(jué)的小視場(chǎng)問(wèn)題和匹配困難問(wèn)題。 單目視覺(jué)測(cè)量示意圖 單目視覺(jué)方法又可分聚焦法和離焦法兩類。聚焦法是指首先使相機(jī)相對(duì)于被測(cè)點(diǎn)處于聚焦位置,然后根據(jù)
2020-12-01 15:08:04
機(jī)器視覺(jué) --檢測(cè)圖像邊緣小程序
2015-08-23 21:35:10
反射的圖案對(duì)環(huán)境中的光學(xué)干擾敏感,并且僅限于室內(nèi)應(yīng)用。 3、結(jié)構(gòu)光成像技術(shù) 投影結(jié)構(gòu)光3D圖像捕獲方法的原理。(a)將照明圖案投射到場(chǎng)景上,并用相機(jī)捕獲反射圖像。一個(gè)點(diǎn)的深度取決于它在圖案
2019-11-19 15:28:37
在機(jī)器視覺(jué)中,怎么標(biāo)定坐標(biāo)原點(diǎn)啊,我用的圖像匹配可以標(biāo)定一個(gè)坐標(biāo)原點(diǎn),但是在不同的圖像上會(huì)有偏移,怎么才能減小偏移呢。求大家指教一下
2013-01-18 15:53:54
在很多測(cè)量項(xiàng)目中,很多因素會(huì)直接影響測(cè)量效果。下面以打光的穩(wěn)定性、工件位置的不一致性、標(biāo)定、物體的運(yùn)動(dòng)速度、軟件的測(cè)量精度等因素分析下應(yīng)該怎樣選擇合適的工業(yè)相機(jī)以及視覺(jué)檢測(cè)軟件。第一:打光的穩(wěn)定性
2014-05-15 15:16:31
,這種方法并不去刻意模擬人類視覺(jué)系統(tǒng)內(nèi)部結(jié)構(gòu),而是從分析人類視覺(jué)過(guò)程的功能著手,僅考慮系統(tǒng)的輸入和輸出,并采用現(xiàn)有的可行的手段實(shí)現(xiàn)系統(tǒng)功能。機(jī)器視覺(jué)就是一項(xiàng)偏重于工程化的技術(shù),能夠自動(dòng)獲取和分析特定的圖像
2014-05-13 14:57:44
等多個(gè)領(lǐng)域。本文重點(diǎn)介紹機(jī)器視覺(jué)在汽車(chē)和、機(jī)器人工廠的中的應(yīng)用案例,為方案網(wǎng)指引商機(jī)。 機(jī)器視覺(jué)的基本概念很構(gòu)成 機(jī)器視覺(jué)就是用機(jī)器代替人眼來(lái)做測(cè)量和判斷。機(jī)器視覺(jué)系統(tǒng)是指通過(guò)機(jī)器視覺(jué)產(chǎn)品將被攝取
2022-12-01 14:54:12
機(jī)器視覺(jué)在精密測(cè)量中的應(yīng)用是什么?機(jī)器視覺(jué)在在汽車(chē)制造業(yè)中的應(yīng)用是什么?
2021-05-17 06:07:22
汽車(chē)車(chē)身檢測(cè)系統(tǒng)英國(guó)ROVER汽車(chē)公司800系列汽車(chē)車(chē)身輪廓尺寸精度的100%在線檢測(cè),是機(jī)器視覺(jué)系統(tǒng)用于工業(yè)檢測(cè)中的一個(gè)較為典型的例子,該系統(tǒng)由62個(gè)測(cè)量單元組成,每個(gè)測(cè)量單元包括一臺(tái)激光器和一個(gè)
2015-11-18 19:21:04
本帖最后由 lilin0734 于 2017-11-15 20:09 編輯
機(jī)器視覺(jué)手眼標(biāo)定
2017-11-06 10:45:41
、相機(jī)、圖像采集、視覺(jué)處理器由于機(jī)器視覺(jué)系統(tǒng)可以快速獲取大量信息,而且易于自動(dòng)處理,也易于同設(shè)計(jì)信息以及加工控制信息集成,因此,在現(xiàn)代自動(dòng)化生產(chǎn)過(guò)程中,人們將機(jī)器視覺(jué)系統(tǒng)廣泛地用于工況監(jiān)視、成品
2016-01-17 07:56:01
,機(jī)器視覺(jué)測(cè)試就是用機(jī)器代替肉眼來(lái)做測(cè)量和判斷.首先采用CCD照相機(jī)將被攝取目標(biāo)轉(zhuǎn)換成圖像信號(hào),傳送給專用的圖像處理系統(tǒng),根據(jù)像素分布和亮度、顏色等信息,轉(zhuǎn)變成數(shù)字化信號(hào)。圖像系統(tǒng)對(duì)這些信號(hào)進(jìn)行各種
2014-03-13 10:21:47
`機(jī)器視覺(jué)檢測(cè)設(shè)備<span] 機(jī)器視覺(jué)檢測(cè)設(shè)備采用的是工業(yè)相機(jī)分黑白相機(jī)跟彩色相機(jī),今天思普泰克要跟大家聊聊這兩種相機(jī)的成像原理。 一、<span] 曝光后
2019-12-16 16:30:56
和測(cè)量方形、圓形和橢圓形物體。提高機(jī)器視覺(jué)系統(tǒng)的精確度,可以幫助保持統(tǒng)一的包裝表面和顏色。盡管照相機(jī)、分析軟件和照明對(duì)于機(jī)器視覺(jué)系統(tǒng)都是十分重要的,可能最關(guān)鍵的元件還是工業(yè)相機(jī)鏡頭。系統(tǒng)若想完全發(fā)揮其功能
2012-10-22 15:57:59
Etherne千兆網(wǎng)2.4.6 圖像采集模式3 機(jī)器視覺(jué)算法3.1 數(shù)據(jù)結(jié)構(gòu)3.1.1 圖像3.1.2 區(qū)域3.1.3 亞像素精度輪廓3.2 圖像增強(qiáng)3.2.1 灰度值變換3.2.2 輻射標(biāo)定
2016-06-29 13:48:38
在自動(dòng)化制造行業(yè)中,用機(jī)器視覺(jué)測(cè)量工件的各種尺寸參數(shù),如長(zhǎng)度測(cè)量、圓測(cè)量、角度測(cè)量、弧線測(cè)量、區(qū)域測(cè)量等,需要檢測(cè)出工件相關(guān)區(qū)域的基本幾何特征,具有精度高、操作簡(jiǎn)單,易于調(diào)整、成本低等優(yōu)點(diǎn),受到
2020-12-10 16:35:15
機(jī)器視覺(jué)是通過(guò)采用非接觸式的光學(xué)感知設(shè)備自動(dòng)接收和解析真實(shí)場(chǎng)景的影像,以獲取信息和控制機(jī)器或工藝過(guò)程。機(jī)器視覺(jué)系統(tǒng)基本配置包含工業(yè)相機(jī)與鏡頭,決定拾取圖像的清晰度;光源,作為輔助成像器件,對(duì)成像質(zhì)量
2014-06-09 14:55:04
。這就不得不引入機(jī)器視覺(jué)系統(tǒng)這個(gè)概念,所謂機(jī)器視覺(jué)系統(tǒng),即指利用機(jī)器代替人眼來(lái)作各種測(cè)量和判斷的一種系統(tǒng)。 機(jī)器視覺(jué)系統(tǒng)一般包括光源、光學(xué)系統(tǒng),CCD相機(jī)/CMOS相機(jī)、圖像采集卡、圖像處理單元、機(jī)器
2014-06-13 15:07:16
顯示器,或者輸入計(jì)算機(jī)的內(nèi)存,進(jìn)行數(shù)值化處理。CCD是現(xiàn)在最常用的機(jī)器視覺(jué)傳感器。 圖像處理技術(shù) 機(jī)器視覺(jué)系統(tǒng)中,視覺(jué)信息的處理技術(shù)主要依賴于圖像處理方法,它包括圖像增強(qiáng)、數(shù)據(jù)編碼和傳輸、平滑、邊緣
2019-07-08 08:30:00
`機(jī)器視覺(jué)被廣泛應(yīng)用于自動(dòng)質(zhì)量檢驗(yàn)、工藝控制、參數(shù)測(cè)量和自動(dòng)組裝等等許多領(lǐng)域。在這些系統(tǒng)中,相機(jī)是決定著成本、速度和精度的關(guān)鍵組件。工業(yè)模擬相機(jī)和工業(yè)數(shù)字相機(jī)都可以用在這些系統(tǒng)中,而了解工業(yè)相機(jī)
2018-12-03 17:09:45
,相對(duì)于立體視覺(jué)中攝像機(jī)間的標(biāo)定,這種方法只需對(duì)攝像機(jī)內(nèi)參數(shù)進(jìn)行標(biāo)定,提高了系統(tǒng)的效率。4.定位算法基本過(guò)程:簡(jiǎn)單的算法過(guò)程,可基于OpenCV進(jìn)行簡(jiǎn)單實(shí)現(xiàn)。輸入通過(guò)攝像頭獲取的視頻流(主要為灰度圖像
2019-06-08 08:30:00
電子電器行業(yè)的飛速發(fā)展,讓消費(fèi)者在追求高科技的同時(shí),對(duì)產(chǎn)品性能和品質(zhì)有了更多的關(guān)注。在國(guó)內(nèi),設(shè)備視覺(jué)檢測(cè)技術(shù)主要應(yīng)用于定位、檢測(cè)、測(cè)量和識(shí)別四個(gè)主要方面,在進(jìn)行圖像采集和圖像處理的過(guò)程中,下面五個(gè)
2018-09-29 18:25:37
`1、前言工業(yè)相機(jī)是機(jī)器視覺(jué)系統(tǒng)中的一個(gè)關(guān)鍵組件,其最本質(zhì)的功能就是將光信號(hào)轉(zhuǎn)變成有序的電信號(hào)。選擇合適的相機(jī)也是機(jī)器視覺(jué)系統(tǒng)設(shè)計(jì)中的重要環(huán)節(jié),相機(jī)的選擇不僅直接決定所采集到的圖像分辨率、圖像質(zhì)量等
2018-04-08 17:10:23
系統(tǒng)還需要進(jìn)行校準(zhǔn)。校準(zhǔn)過(guò)程需要使用校準(zhǔn)網(wǎng)格,此網(wǎng)格在不同角度處獲得,用來(lái)計(jì)算圖像失真以及兩只相機(jī)之間的確切空間關(guān)系。圖下圖所示是視覺(jué)開(kāi)發(fā)模塊附帶的校準(zhǔn)網(wǎng)格。雙目標(biāo)定的基本步驟如下:1)完成左相機(jī)和右相機(jī)
2020-03-02 17:03:12
本帖最后由 lilin0734 于 2020-11-11 08:22 編輯
Labview通用機(jī)器視覺(jué)框架,聯(lián)系微信:***框架功能:1. 相機(jī)配置2. 導(dǎo)入圖片3. 采集圖片4. 各種標(biāo)定
2020-10-10 10:34:29
``【課程推薦】龍哥手把手教你學(xué)LabVIEW機(jī)器視覺(jué)設(shè)計(jì)教程請(qǐng)問(wèn)哪位大神有Labview機(jī)器視覺(jué)相機(jī)標(biāo)定的程序文件,麻煩分享一下?在下不甚感激!qq:599108466.``
2016-05-25 12:36:45
最近在學(xué)習(xí)NI 視覺(jué)助手的標(biāo)定訓(xùn)練,想請(qǐng)教一下:在標(biāo)定時(shí)我們輸入的一般是一個(gè)標(biāo)定板1,如果圖像有較大的畸變失真(這里有個(gè)問(wèn)題1:這個(gè)失真是指我要檢測(cè)的圖像存在失真還是指拍攝的標(biāo)定板圖像的失真?)則需
2016-06-13 11:14:32
請(qǐng)教大神:labview機(jī)器視覺(jué)中已經(jīng)建立CCD相機(jī)的坐標(biāo)系,那如何測(cè)量矩形工件相對(duì)于X軸擺放的角度?
2016-10-10 11:08:34
最近在做視覺(jué),需要用labview做相機(jī)的標(biāo)定,通過(guò)空間轉(zhuǎn)換確定空間位置。視覺(jué)助手的標(biāo)定只能標(biāo)定內(nèi)參數(shù),沒(méi)有辦法做內(nèi)外參數(shù)的標(biāo)定,哪位大神給指導(dǎo)指導(dǎo)如何做一個(gè)標(biāo)準(zhǔn)的標(biāo)定程序。
2017-04-24 16:08:44
labview視覺(jué)測(cè)量如何使用標(biāo)定板進(jìn)行標(biāo)定,看了自帶的工具,但是標(biāo)定板有自己的厚度,這個(gè)厚度值怎么放入標(biāo)定的程序?》
2019-08-10 13:22:53
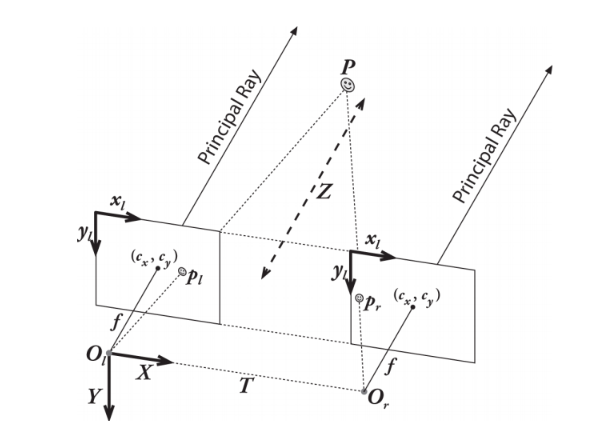
雙目視覺(jué)的原理:由于視差原理,左右兩個(gè)ccd的位置固定,若能測(cè)量空間中同一個(gè)點(diǎn)P在左右兩個(gè)ccd中圖像的位置,則根據(jù)三角原理,可以求得P點(diǎn)在空間中的坐標(biāo)位置。可用于攝像頭實(shí)現(xiàn)空間點(diǎn)的距離測(cè)量。下圖
2021-09-27 16:52:18
結(jié)果最后保存為PNG文檔用于測(cè)量調(diào)用。這里選擇VISION ASSITANT用于測(cè)量,具體步驟是先選擇或者利用相機(jī)抓取圖像,然后選擇image calibration進(jìn)行圖像標(biāo)定,之后進(jìn)行圖像的一些簡(jiǎn)單
2016-03-12 16:36:24
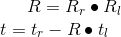
的三維坐標(biāo)值了。把該三維坐標(biāo)值輸入機(jī)器人控制系統(tǒng),機(jī)器人就可以智能的實(shí)現(xiàn)避障了。在這部分中用到了“立體匹配”算法,其實(shí)該算法是和雙目標(biāo)定相結(jié)合,該算法根據(jù)特征點(diǎn)在左右圖像中的坐標(biāo)點(diǎn)進(jìn)行基礎(chǔ)矩陣的計(jì)算并將
2013-11-21 16:20:51
高質(zhì)量的圖像處理算法,例如機(jī)器視覺(jué)(Machine Vision)應(yīng)用,而普通相機(jī)拍攝的圖片,其光譜范圍只適合人眼視覺(jué),并且經(jīng)過(guò)了mjpeg壓縮,圖像質(zhì)量較差,不利于分析處理;6、工業(yè)相機(jī)
2021-12-30 10:55:03
從某種意義上說(shuō),圖像處理分析屬于機(jī)器視覺(jué)的一部分,但是圖像處理拎開(kāi)來(lái)講,又是一門(mén)更廣的學(xué)科,所以實(shí)際上只能說(shuō)機(jī)器視覺(jué)運(yùn)用到了圖像處理分析中的一部分技術(shù)。以上就是四元數(shù)數(shù)控小編給你們介紹的深圳機(jī)器視覺(jué)技術(shù)是圖像處理嗎,希望大家看后有所幫助!
2021-12-23 14:35:08
在機(jī)器視覺(jué)檢測(cè)系統(tǒng)中,檢測(cè)系統(tǒng)的誤差通常包括:機(jī)械誤差、標(biāo)定誤差和分析誤差三部分。其中,機(jī)械誤差是由系統(tǒng)機(jī)電執(zhí)行部分硬件引入的,例如在一幅圖像內(nèi)可能無(wú)法完成對(duì)工件的測(cè)量,工件需要移動(dòng)位置來(lái)采集多幅
2022-02-15 09:50:28
在自動(dòng)化制造行業(yè)中,用機(jī)器視覺(jué)測(cè)量工件的各種尺寸參數(shù),如長(zhǎng)度測(cè)量、圓測(cè)量、角度測(cè)量、弧線測(cè)量、區(qū)域測(cè)量等,需要檢測(cè)出工件相關(guān)區(qū)域的基本幾何特征,具有精度高、操作簡(jiǎn)單,易于調(diào)整、成本低等優(yōu)點(diǎn),受到
2021-11-09 13:53:00
工業(yè)機(jī)器人是制造業(yè)的高端制造設(shè)備,對(duì)于穩(wěn)定性、定位精準(zhǔn)度的要求較高,因此需要借助機(jī)器視覺(jué)技術(shù)處理圖像。通過(guò)工業(yè)相機(jī)實(shí)現(xiàn)引導(dǎo)定位和模式識(shí)別等操作,快速獲取物體的質(zhì)心和邊界,滿足工業(yè)機(jī)器人系統(tǒng)運(yùn)行的自定
2021-11-17 11:27:44
`隨著工業(yè)相機(jī)的應(yīng)用越來(lái)越廣泛,多工業(yè)相機(jī)視覺(jué)系統(tǒng)測(cè)量的需求量日益增多,而多工業(yè)相機(jī)視覺(jué)系統(tǒng)測(cè)量的核心主要在于多相機(jī)坐標(biāo)系的統(tǒng)一。以維視圖像多年的項(xiàng)目經(jīng)驗(yàn),今天和大家分享在四臺(tái)工業(yè)相機(jī)的情況下
2015-11-18 11:05:45
:Ethernet,WiFi;加密保護(hù)等。如圖3所示。圖3 智能相機(jī)VDSR2、軟件技術(shù)系統(tǒng)中的ARM處理器主要負(fù)責(zé)資源管理、邏輯控制,搭載AngstromLinux系統(tǒng),并集成機(jī)器視覺(jué)所需功能模塊的驅(qū)動(dòng)。系統(tǒng)軟件
2019-06-21 08:30:00
不依賴于標(biāo)定參照物,僅利用攝像機(jī)在運(yùn)動(dòng)過(guò)程中周?chē)h(huán)境圖像與圖像之間的對(duì)應(yīng)關(guān)系來(lái)對(duì)攝像機(jī)進(jìn)行的標(biāo)定的方法稱為攝像機(jī)自標(biāo)定方法。目前已有的自標(biāo)定技術(shù)大致可以分為基于主動(dòng)視覺(jué)的攝像機(jī)自標(biāo)定技術(shù)、直接求解
2019-06-04 08:00:00
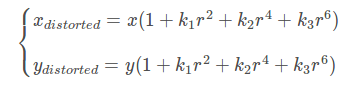
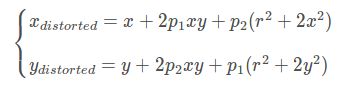
處理計(jì)算帶來(lái)誤差,為了消除這些誤差,我們?cè)谶M(jìn)行3D視覺(jué)建模的過(guò)程中需要對(duì)我們使用的攝像機(jī)進(jìn)行標(biāo)定,獲取相機(jī)內(nèi)外參數(shù),然后再根據(jù)內(nèi)外參數(shù)對(duì)計(jì)算進(jìn)行糾正。攝像機(jī)采集到的圖像發(fā)生的畸變通常分為徑向畸變和切向
2018-09-28 10:32:24
、顯微鏡頭)、相機(jī)(包括CCD相機(jī)和COMS相機(jī))、圖像處理單元(或圖像采集卡)、圖像處理軟件、監(jiān)視器、通訊/輸入輸出單元等。其中圖像處理單元,又可以稱為圖像采集卡,是完整的機(jī)器視覺(jué)系統(tǒng)的一個(gè)部件
2020-09-16 15:52:00
大家好,畢業(yè)設(shè)計(jì)做基于labview機(jī)器視覺(jué)的圖像定位系統(tǒng),打算調(diào)用筆記本的攝像頭進(jìn)行圖像采集,再進(jìn)行圖像處理,視覺(jué)模塊和采集模塊已經(jīng)下載了,可是不知道怎么采集圖像,求大家支招.
2017-03-31 14:54:31
典型的機(jī)器視覺(jué)系統(tǒng)主要由光源、鏡頭、工業(yè)相機(jī)、圖像采集卡或圖像處理器,以及控制輸出單元等硬件構(gòu)成。其中,工業(yè)相機(jī)是機(jī)器視覺(jué)系統(tǒng)最核心的組件,其本質(zhì)的功能就是將光信號(hào)轉(zhuǎn)變成為有序的電信號(hào),再將該信號(hào)
2019-09-11 11:52:15
實(shí)現(xiàn)各種檢測(cè)、判斷、識(shí)別、測(cè)量等功能。今天,咱們就來(lái)感受一下機(jī)器視覺(jué)技術(shù)的魅力。機(jī)器視覺(jué)的五大典型架構(gòu)1.照明還記得當(dāng)初在參加一場(chǎng)有關(guān)機(jī)器視覺(jué)技術(shù)會(huì)議的時(shí)候,一位技術(shù)大牛特意強(qiáng)調(diào)了機(jī)器視覺(jué)中關(guān)于照明
2019-08-16 04:30:00
機(jī)器視覺(jué)就是用機(jī)器代替人眼來(lái)做測(cè)量和判斷。機(jī)器視覺(jué)系統(tǒng)是指通過(guò)機(jī)器視覺(jué)產(chǎn)品(即圖像攝取裝置,分 CMOS 和CCD 兩種)將被攝取目標(biāo)轉(zhuǎn)換成圖像信號(hào),傳送給專用的圖像處理系統(tǒng),得到被攝目標(biāo)的形態(tài)信息
2015-11-09 10:16:10
處理器或計(jì)算機(jī)存儲(chǔ)器中。9.處理器處理、分析和識(shí)別圖像,以獲得測(cè)量結(jié)果或邏輯控制值。10.處理結(jié)果控制配管的動(dòng)作,定位,糾正運(yùn)動(dòng)誤差。四元數(shù)致力于運(yùn)動(dòng)控制、圖像與視覺(jué)傳感等工業(yè)自動(dòng)化技術(shù)的研發(fā)和應(yīng)用,產(chǎn)品
2021-07-15 09:40:59
,這種非接觸式的視覺(jué)對(duì)位系統(tǒng)測(cè)量方法在重復(fù)測(cè)量,復(fù)雜環(huán)境中得到廣泛的應(yīng)用,其中在精密工件的測(cè)量應(yīng)用很廣泛;3、視覺(jué)檢測(cè)最早應(yīng)用于工業(yè)領(lǐng)域的機(jī)器視覺(jué)技術(shù),通過(guò)攝像頭成像分析當(dāng)前物件與標(biāo)準(zhǔn)物件的差別,得到
2021-10-29 14:37:38
在機(jī)器視覺(jué)應(yīng)用中,標(biāo)定板的使用非常必要,因?yàn)閷?duì)于精度測(cè)量來(lái)講,鏡頭本身的畸變不可避免,同時(shí)又需要達(dá)到客戶滿意的精度,因此要求本身的圖像就非常真實(shí)、準(zhǔn)確,否則軟件水平再高,那也是基于有誤差的圖像
2022-02-25 09:55:55
機(jī)器視覺(jué)系統(tǒng)中的照明系統(tǒng)是極其重要的一部分,如何選擇光源方案,它的好壞直接影響著后面的圖像處理。合適的照明是機(jī)器視覺(jué)應(yīng)用成功的關(guān)鍵,通過(guò)適當(dāng)?shù)墓庠凑彰髟O(shè)計(jì),使圖像中的目標(biāo)信息與背景信息得到最佳分離
2019-08-02 06:40:52
傳感器的靈敏度要高于CMOS傳感器;3、CCD傳感器的噪聲水平比CMOS傳感器低很多,成像品質(zhì)更高。以上就是為什么機(jī)器視覺(jué)檢測(cè)設(shè)備用ccd相機(jī)的比較多的原因。深圳四元數(shù)致力于運(yùn)動(dòng)控制、圖像與視覺(jué)傳感等工業(yè)
2020-09-01 14:23:33
由于光學(xué)系統(tǒng)在提高檢測(cè)精度和增強(qiáng)可檢測(cè)性等方面獨(dú)到的優(yōu)越性,隨著自動(dòng)化技術(shù)水平的提高,激光和機(jī)器視覺(jué)現(xiàn)已廣泛用于貼片機(jī)技術(shù)中,特別是機(jī)器視覺(jué)技術(shù),在貼裝技術(shù)中作用越來(lái)越重要。0201、01005
2018-09-03 10:25:54
光學(xué)標(biāo)定板應(yīng)用領(lǐng)域宏誠(chéng)光學(xué)玻璃系列標(biāo)定板和陶瓷系列標(biāo)定板是專為高校實(shí)驗(yàn)、研究單位項(xiàng)目研發(fā)和機(jī)器視覺(jué)集成商產(chǎn)品標(biāo)定等等客戶群體使用的常用標(biāo)定工具,能夠方便獲得相機(jī)的標(biāo)定數(shù)據(jù)。標(biāo)定板作用:為校正鏡頭畸變
2022-09-20 08:14:32
利用空間直線的中心折反射投影的特性對(duì)全維視覺(jué)系統(tǒng)的標(biāo)定方法進(jìn)行了研究。應(yīng)用光線追跡法提取空間直線折反射圖像上的點(diǎn),并提出一種基于最小二乘理論的二次曲線擬合方法
2009-06-11 10:41:43 8
8 本文提出一種基于圖像輪廓進(jìn)行相機(jī)自標(biāo)定并計(jì)算投影矩陣從而恢復(fù)物體三維模型的方法。首先使用鏡面反射從圖像中獲取物體的多角度成像并利用閾值和邊緣提取得到圖像的輪
2009-12-07 11:53:5019 利用機(jī)器視覺(jué)的攝像機(jī)標(biāo)定方法研究
機(jī)器視覺(jué)的基本任務(wù)之一是從攝像機(jī)獲取圖像信息并計(jì)算三維空間中物體的幾何信息,以由此重建和識(shí)別物體。而空間物體表面某
2010-03-04 10:04:54 1005
1005 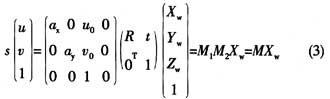
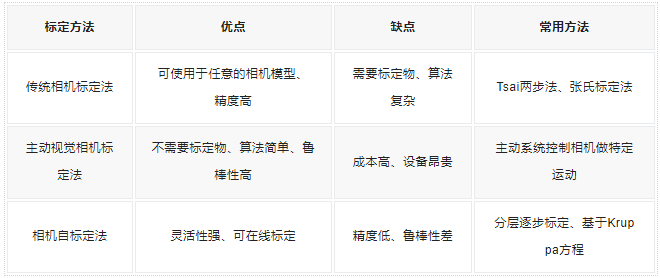
什么是攝相機(jī)標(biāo)定?攝相機(jī)標(biāo)定方法的分類?感興趣的小伙伴們可以瞧一瞧。
2016-09-22 12:04:450 攝像機(jī)標(biāo)定是機(jī)器視覺(jué)和攝像測(cè)量領(lǐng)域相對(duì)基礎(chǔ)的工作,同時(shí)也是最復(fù)雜、困難的T作。攝像機(jī)標(biāo)定的意義是得到立體空間中對(duì)象的幾何信息,其中所使用的圖像信息由雙目攝像機(jī)所得。定后的雙目攝像機(jī)得到的圖像目標(biāo)信息
2017-11-06 14:41:0530 在三維視覺(jué)測(cè)量系統(tǒng)中,對(duì)儀器參數(shù)的標(biāo)定是首先需要解決的難題,而對(duì)投影儀的內(nèi)外參數(shù)標(biāo)定是三維結(jié)構(gòu)光測(cè)量系統(tǒng)中不可或缺的一部分。就目前而言,投影儀的參數(shù)標(biāo)定還存在著標(biāo)定精度偏低、方法單一、可操作性差等
2017-11-06 15:30:2120 針對(duì)常見(jiàn)的圓孔目標(biāo)檢測(cè),設(shè)計(jì)了一套基于機(jī)器視覺(jué)的尺寸測(cè)量系統(tǒng)。采用標(biāo)準(zhǔn)同心圓標(biāo)定板進(jìn)行標(biāo)定,并針對(duì)一般圓擬合算法的不足,對(duì)該標(biāo)定板圖像建立了基于距離空間聚類的劃分區(qū)域算法,對(duì)區(qū)域單獨(dú)采用最小二乘擬合
2017-11-14 11:07:0525 使用LabVIEW和用于DENSO的ImagingLab Robotics庫(kù),機(jī)器視覺(jué)和機(jī)器人系統(tǒng)可以集成在一個(gè)應(yīng)用程序中。本文介紹了使用相同坐標(biāo)系統(tǒng)在機(jī)器視覺(jué)系統(tǒng)和機(jī)器人系統(tǒng)之間進(jìn)行標(biāo)定的方法
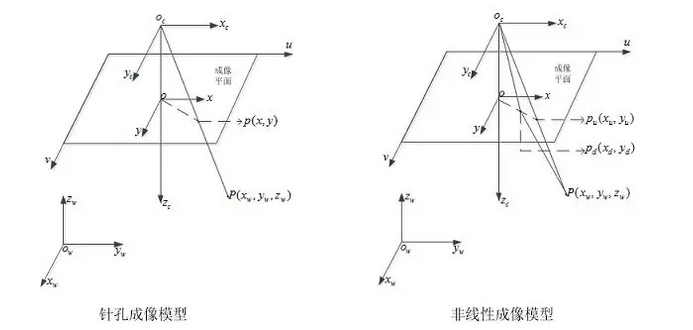
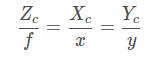
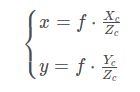
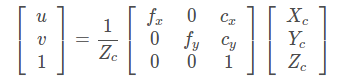
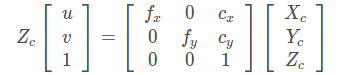
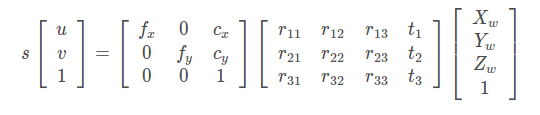
2017-11-17 17:03:2512638 我們首先介紹下計(jì)算機(jī)視覺(jué)領(lǐng)域中常見(jiàn)的三個(gè)坐標(biāo)系:圖像坐標(biāo)系,相機(jī)坐標(biāo)系,世界坐標(biāo)系。以及他們之間的關(guān)系。然后介紹如何使用張正友相機(jī)標(biāo)定法標(biāo)定相機(jī)。攝像機(jī)標(biāo)定(Camera calibration)簡(jiǎn)單來(lái)說(shuō)是從世界坐標(biāo)系換到圖像坐標(biāo)系的過(guò)程,也就是求最終的投影矩陣的過(guò)程。
2017-12-04 16:56:3517861 
機(jī)器視覺(jué),主要是指使用相機(jī),自動(dòng)通過(guò)CCD或者CMOS獲得圖像,之后對(duì)于圖像進(jìn)行分析,此類分析可以是自動(dòng)或者人工判斷。隨著如今工業(yè)自動(dòng)化程度的提高,越來(lái)越多的機(jī)器視覺(jué)被用在工業(yè)生產(chǎn)之中,可以說(shuō)
2018-01-08 16:33:323 圖像測(cè)量技術(shù)在工業(yè)現(xiàn)場(chǎng)的應(yīng)用日益廣泛,已成為產(chǎn)品幾何尺寸測(cè)量的重要方法,但光學(xué)鏡頭的徑向畸變對(duì)測(cè)量結(jié)構(gòu)有著很大的影響,本文著重介紹利用LABVIEW開(kāi)發(fā)平臺(tái)下的vision組件對(duì)測(cè)量圖像進(jìn)行標(biāo)定
2018-02-23 10:00:4176 在應(yīng)用機(jī)器視覺(jué)進(jìn)行檢測(cè)或測(cè)量時(shí),要得到精確的測(cè)量值,需要相機(jī)CCD平面和實(shí)際檢測(cè)或測(cè)量零件的表面相平行。否則,將發(fā)生透視性失真,從而很難保證精度。相機(jī)CCD與零件表面的平行通常通過(guò)人工調(diào)整夾具來(lái)保證。但是,調(diào)整夾具不可能完全保證平行,而且需要耗費(fèi)很長(zhǎng)的時(shí)間。
2020-05-26 08:02:004601 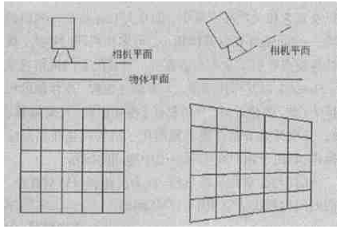
相機(jī)標(biāo)定可以說(shuō)是計(jì)算機(jī)視覺(jué)/機(jī)器視覺(jué)的基礎(chǔ),但是初學(xué)者不易上手,本文將給讀者整理一遍相機(jī)標(biāo)定的邏輯,并在文末回答評(píng)論區(qū)提出的問(wèn)題。分為以下內(nèi)容:
2019-06-01 09:54:153969 
機(jī)器視覺(jué)就是用機(jī)器代替人眼來(lái)做測(cè)量和判斷,通過(guò)將被攝目標(biāo)轉(zhuǎn)換成圖像信號(hào),傳送給圖像處理系統(tǒng)進(jìn)行各種運(yùn)算來(lái)做出各種判斷。整個(gè)機(jī)器視覺(jué)系統(tǒng)是由眾多部分組成的,而相機(jī)恰恰在整個(gè)視覺(jué)系統(tǒng)中起到了眼睛的作用,其重要性就非常明顯了。那么,在工業(yè)生產(chǎn)中,完整的機(jī)器視覺(jué)系統(tǒng)對(duì)于工業(yè)相機(jī)都有哪些要求呢?
2019-08-01 17:21:5521 線陣相機(jī)是一類特殊的視覺(jué)機(jī)器,將二維光學(xué)圖像轉(zhuǎn)變?yōu)橐痪S視頻信號(hào)輸出,與面陣相機(jī)相比,它的傳感器只有一行感光元素,因此使高掃描頻率和高分辨率成為發(fā)展趨勢(shì)。
2019-08-13 16:54:5826 圖像測(cè)量技術(shù)在工業(yè)現(xiàn)場(chǎng)的應(yīng)用日益廣泛 ,已成為產(chǎn)品幾何尺寸測(cè)量的重要方法。但光學(xué)鏡頭的徑向畸變對(duì)測(cè)量結(jié)果有著很大的影響 ,本文著重介紹利用 Labview 開(kāi)發(fā)平臺(tái)下的 vision 組件對(duì)測(cè)量圖像
2020-03-17 08:00:0027 在圖像測(cè)量過(guò)程以及機(jī)器視覺(jué)應(yīng)用中,為確定空間物體表面某點(diǎn)的三維幾何位置與其在圖像中對(duì)應(yīng)點(diǎn)之間的相互關(guān)系,必須建立相機(jī)成像的幾何模型,這些幾何模型參數(shù)就是相機(jī)參數(shù)。
2020-08-28 15:18:0812721 采用張正友提出的基于2D平面棋盤(pán)格的攝像機(jī)標(biāo)定方法,利用Matlab攝像頭標(biāo)定工具完成相機(jī)參數(shù)的標(biāo)定。
2020-08-31 10:04:124714 
視覺(jué)檢測(cè)設(shè)備主要是通過(guò)機(jī)器視覺(jué)相機(jī)圖像數(shù)據(jù),來(lái)展現(xiàn)在我們面前的,這也是為什么圖片看上去沒(méi)有手機(jī)上的好看,機(jī)器視覺(jué)相機(jī)可以通過(guò)圖像數(shù)據(jù)經(jīng)過(guò)壓縮和平滑處理,但是不能夠提供缺陷檢測(cè)需要的質(zhì)量問(wèn)題。 如果您
2020-09-22 15:16:471713 轉(zhuǎn)自:微信公眾號(hào)AI圖像 創(chuàng)建標(biāo)定數(shù)據(jù)模型 你可以用算子create_calib_data創(chuàng)建一個(gè)標(biāo)定數(shù)據(jù)模型,指定相機(jī)和標(biāo)定物體的數(shù)量。當(dāng)用一個(gè)相機(jī)的時(shí)候,你也用一個(gè)單獨(dú)的標(biāo)定物體。 然后,你要做
2020-10-31 11:31:383434 
1.前言無(wú)論2D相機(jī)還是3D相機(jī),提到相機(jī)不可避免地涉及到機(jī)器視覺(jué)。 機(jī)器視覺(jué)與計(jì)算機(jī)視覺(jué)并沒(méi)有一個(gè)明顯的定義去劃分。但在實(shí)際應(yīng)用中,應(yīng)用于工業(yè)檢測(cè)的時(shí)候更多地被稱為機(jī)器視覺(jué)而非計(jì)算機(jī)視覺(jué)。這時(shí)候
2020-11-27 09:46:037809 張正友相機(jī)標(biāo)定法是張正友教授1998年提出的單平面棋盤(pán)格的相機(jī)標(biāo)定方法。傳統(tǒng)標(biāo)定法的標(biāo)定板是需要三維的,需要非常精確,這很難制作,而張正友教授提出的方法介于傳統(tǒng)標(biāo)定法和自標(biāo)定法之間,但克服了傳統(tǒng)標(biāo)定
2020-12-31 10:06:195420 
相機(jī)標(biāo)定在計(jì)算機(jī)視覺(jué)領(lǐng)域中有著至關(guān)重要的作用。絕大多數(shù)相杋標(biāo)定方法假設(shè)相機(jī)為針孔模型,且需要良好聚焦的圖像來(lái)保證相機(jī)內(nèi)外參估計(jì)的準(zhǔn)確性。然而,這些條件會(huì)受到相機(jī)景深的影響。在薄透鏡相機(jī)模型假設(shè)
2021-04-21 15:05:5716 相機(jī)固定不動(dòng), 上往下看引導(dǎo)機(jī)器人移動(dòng) 機(jī)器人與視覺(jué)標(biāo)定理論詳解 1.相機(jī)非線性校正使用標(biāo)定板做非線性校正2.相機(jī)與機(jī)器人做9點(diǎn)標(biāo)定可以使用機(jī)器人扎9個(gè)點(diǎn),或者機(jī)器人抓住工件擺放9個(gè)位置,得到
2021-05-27 14:15:533251 
在大多數(shù)條件下,這些參數(shù)必須通過(guò)實(shí)驗(yàn)與計(jì)算才能得到。無(wú)論是在圖像測(cè)量或者機(jī)器視覺(jué)應(yīng)用中,相機(jī)參數(shù)的標(biāo)定都是非常關(guān)鍵的環(huán)節(jié),其標(biāo)定結(jié)果的精度及算法的穩(wěn)定性直接影響相機(jī)工作產(chǎn)生結(jié)果的準(zhǔn)確性。
2022-06-21 11:12:347612 在實(shí)際控制中,相機(jī)檢測(cè)到目標(biāo)在圖像中的像素位置后,通過(guò)標(biāo)定好的坐標(biāo)轉(zhuǎn)換矩陣將相機(jī)的像素坐標(biāo)變換到機(jī)械手的空間坐標(biāo)系中,然后根據(jù)機(jī)械手坐標(biāo)系計(jì)算出各個(gè)電機(jī)該如何運(yùn)動(dòng),從而控制機(jī)械手到達(dá)指定位置。這個(gè)過(guò)程中涉及到了圖像標(biāo)定,圖像處理,運(yùn)動(dòng)學(xué)正逆解,手眼標(biāo)定等。
2022-08-18 15:54:375456 在圖像測(cè)量過(guò)程以及機(jī)器視覺(jué)應(yīng)用中,為確定空間物體表面某點(diǎn)的三維幾何位置與其在圖像中對(duì)應(yīng)點(diǎn)之間的相互關(guān)系,必須建立相機(jī)成像的幾何模型,這些幾何模型參數(shù)就是相機(jī)參數(shù)。在大多數(shù)條件下這些參數(shù)必須通過(guò)實(shí)驗(yàn)與計(jì)算才能得到,這個(gè)求解參數(shù)的過(guò)程就稱之為相機(jī)標(biāo)定(或攝像機(jī)標(biāo)定)。
2023-01-10 10:59:04971 背景介紹 準(zhǔn)確標(biāo)定像機(jī)對(duì)于所有的機(jī)器/計(jì)算機(jī)視覺(jué)的成功應(yīng)用都是非常重要的。然而,對(duì)于標(biāo)定板,有不同的模式可供選擇。為了方便進(jìn)行選擇,本文將解釋每種方法的主要好處。 ? 標(biāo)定板的選擇,有CharuCo
2023-01-17 15:13:59598 相機(jī)標(biāo)定是通過(guò)輸入帶有標(biāo)定patter的標(biāo)定板來(lái)獲得相機(jī)參數(shù)的一個(gè)過(guò)程。實(shí)際的光學(xué)成像是一套非常復(fù)雜的過(guò)程,從三維世界投影到相機(jī)中的二維圖像。相機(jī)標(biāo)定就是用抽象的數(shù)學(xué)模型來(lái)表示這個(gè)復(fù)雜的成像過(guò)程。
2023-06-01 14:36:46430 
在圖像測(cè)量過(guò)程以及機(jī)器視覺(jué)應(yīng)用中,為確定空間物體表面某點(diǎn)的三維幾何位置與其在圖像中對(duì)應(yīng)點(diǎn)之間的相互關(guān)系,必須建立相機(jī)成像的幾何模型,這些幾何模型參數(shù)就是相機(jī)參數(shù)。
2023-07-21 12:51:511097 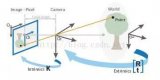
在大多數(shù)條件下,這些參數(shù)必須通過(guò)實(shí)驗(yàn)與計(jì)算才能得到。無(wú)論是在圖像測(cè)量或者機(jī)器視覺(jué)應(yīng)用中,相機(jī)參數(shù)的標(biāo)定都是非常關(guān)鍵的環(huán)節(jié),其標(biāo)定結(jié)果的精度及算法的穩(wěn)定性直接影響相機(jī)工作產(chǎn)生結(jié)果的準(zhǔn)確性。
2023-08-03 09:38:04830 
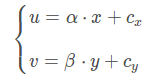
張正友標(biāo)定方法是一種經(jīng)典的相機(jī)標(biāo)定方法,目前是最受歡迎的方法之一。該方法通過(guò)一種機(jī)器學(xué)習(xí)的方法,利用大量匹配的數(shù)據(jù)點(diǎn)像素坐標(biāo)、世界坐標(biāo),基于極大似然估計(jì)擬合得到一個(gè)最優(yōu)解。
2023-08-03 10:59:12641 
常見(jiàn)的機(jī)器人視覺(jué)伺服中要實(shí)現(xiàn)像素坐標(biāo)與實(shí)際坐標(biāo)的轉(zhuǎn)換,首先就要進(jìn)行標(biāo)定,對(duì)于實(shí)現(xiàn)視覺(jué)伺服控制,這里的標(biāo)定不僅包括攝像機(jī)標(biāo)定,也包括機(jī)器人系統(tǒng)的手眼標(biāo)定。
2023-08-04 11:48:47579 
選中Export Camera Parameters按鈕,將計(jì)算得到的相關(guān)參數(shù)導(dǎo)入到Matlab中;若要進(jìn)行更精確的標(biāo)定,可在標(biāo)定時(shí)考慮畸變誤差或采用雙目相機(jī)標(biāo)定方法。
2023-10-09 10:51:50507 
利用本質(zhì)矩陣和基本矩陣的攝像機(jī)標(biāo)定方法;利用主動(dòng)系統(tǒng)控制攝像機(jī)作特定運(yùn)動(dòng)的自標(biāo)定方法(主動(dòng)視覺(jué)標(biāo)定方法)。
2023-10-16 11:42:11253 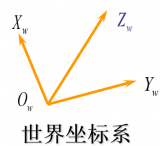
這個(gè)逼近的過(guò)程就是「相機(jī)標(biāo)定」,我們用簡(jiǎn)單的數(shù)學(xué)模型來(lái)表達(dá)復(fù)雜的成像過(guò)程,并且求出成像的反過(guò)程。標(biāo)定之后的相機(jī),可以進(jìn)行三維場(chǎng)景的重建,即深度的感知,這是計(jì)算機(jī)視覺(jué)的一大分支。
2023-10-18 17:00:07476 
 電子發(fā)燒友App
電子發(fā)燒友App


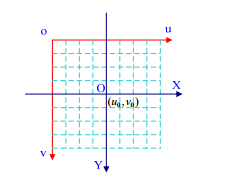
 :在相機(jī)上建立的坐標(biāo)系,為了從相機(jī)的角度描述物體位置而定義,作為溝通世界坐標(biāo)系和圖像/像素坐標(biāo)系的中間一環(huán)。單位為m。
:在相機(jī)上建立的坐標(biāo)系,為了從相機(jī)的角度描述物體位置而定義,作為溝通世界坐標(biāo)系和圖像/像素坐標(biāo)系的中間一環(huán)。單位為m。 :用戶定義的三維世界的坐標(biāo)系,為了描述目標(biāo)物在真實(shí)世界里的位置而被引入。單位為m。
:用戶定義的三維世界的坐標(biāo)系,為了描述目標(biāo)物在真實(shí)世界里的位置而被引入。單位為m。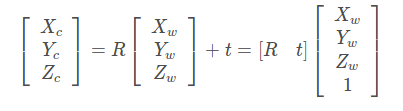
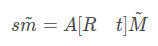
 和
和 分別為m和M對(duì)應(yīng)的齊次坐標(biāo)。
分別為m和M對(duì)應(yīng)的齊次坐標(biāo)。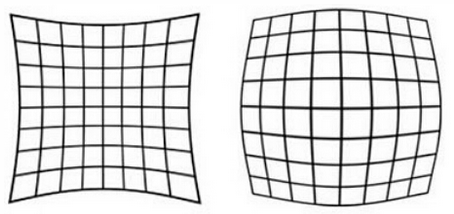








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論