小米MIX4發(fā)布會(huì)接近尾聲的時(shí)候,雷軍向大家介紹了小米內(nèi)部的一個(gè)探索概念項(xiàng)目——四足仿生機(jī)器人CyberDog。 ? CyberDog匯集小米11年的技術(shù)沉淀,是工程師文化和創(chuàng)新精神的深度凝結(jié),也是
2021-08-14 09:00:00 4259
4259 這是仿生機(jī)器人,它是由外運(yùn)行的EZ -B的12舵機(jī),使用的腳本EZ-機(jī)器人的六足機(jī)器人。##這是仿生機(jī)器人,它是由外運(yùn)行的EZ -B的12舵機(jī),使用的腳本EZ-機(jī)器人的六足機(jī)器人。##這是仿生機(jī)器人,它是由外運(yùn)行的EZ -B的12舵機(jī),使用的腳本EZ-機(jī)器人的六足機(jī)器人。
2016-01-28 13:51:3019221 of Science and Technology)研一,修讀的專(zhuān)業(yè)是智能制造與機(jī)器人。 劉瀟翔在嘉立創(chuàng)EDA與傳智教育聯(lián)手舉辦的《仿生機(jī)器狗訓(xùn)練營(yíng)》中脫穎而出,獲特等獎(jiǎng)。他從0-1打造了一個(gè)基于OpenAtom
2022-10-31 21:50:013082 計(jì)劃在明年幫助數(shù)百名兒童,而最終將有成千上萬(wàn)名兒童從中受益。 機(jī)器人手臂已經(jīng)是一個(gè)令人滿(mǎn)意的成功項(xiàng)目,而Albert將這一切都?xì)w功于由擁有不同背景的80名志愿者學(xué)生所組成的偉大團(tuán)隊(duì)。 “能夠用學(xué)到
2019-07-31 04:45:08
,代替人手進(jìn)行抓取、轉(zhuǎn)移工件或料理東西的機(jī)電一體化自動(dòng)裝置。仿生機(jī)械手一般用什么電機(jī)?超聲電機(jī)作為一種新型的微電機(jī),不像傳統(tǒng)的電機(jī)那樣,利用電磁的交叉力來(lái)獲得其運(yùn)動(dòng)和力矩。超聲電機(jī)則是利用壓電陶瓷
2021-07-13 13:59:58
本設(shè)計(jì)主要研究的是小型仿生六足機(jī)器人控制系統(tǒng)的開(kāi)發(fā),其采用自主設(shè)計(jì)的控制器作為硬件平臺(tái)。控制器主要有微處理器、驅(qū)動(dòng)模塊、電源模塊、外圍擴(kuò)展構(gòu)成。其中驅(qū)動(dòng)模塊采用了分時(shí)復(fù)用的原理,將處理器的 3 路
2020-10-13 09:13:11
為“雷克斯”(Rex,是Robotic Exoskeleton機(jī)器外骨骼的縮寫(xiě)),“他”擁有一張以制造者邁耶為藍(lán)本的逼真臉孔,以及人造手腳、人造器官等,團(tuán)隊(duì)稱(chēng)其為世界首個(gè)初具雛形的仿生人。目前在美國(guó)進(jìn)行
2013-12-02 15:49:14
`<b>1、關(guān)于</b>極客蟲(chóng)是一套基于ARM作為主控制器且源碼開(kāi)放的可編程機(jī)器蟲(chóng)。普通用戶(hù)或極客愛(ài)好者可以根據(jù)自己的想法通過(guò)代碼或拖拽的方式
2017-06-19 14:11:43
您的瀏覽器不支持 video 標(biāo)簽。您的瀏覽器不支持 video 標(biāo)簽。1、關(guān)于極客蟲(chóng)是一套基于ARM作為主控制器且源碼開(kāi)放的可編程機(jī)器蟲(chóng)。普通用戶(hù)或極客愛(ài)好者可以根據(jù)自己的想法通過(guò)配套的開(kāi)發(fā)環(huán)境
2017-07-10 17:26:44
醫(yī)療康復(fù)機(jī)器人是近年出現(xiàn)的一種新型機(jī)器人,主要功能是幫助患者完成各種運(yùn)動(dòng)功能恢復(fù)訓(xùn)練。為此提出通過(guò)STM32微控制器控制無(wú)刷直流電機(jī)來(lái)控制機(jī)器手臂的運(yùn)轉(zhuǎn),并通過(guò)Simulink建立PID模型,運(yùn)用
2018-08-22 09:31:22
[亞信線(xiàn)上教學(xué)] AxRobot機(jī)器手臂示教編程教學(xué)視頻I -- 離線(xiàn)編程亞信電子AX58200 AxRobot支持離線(xiàn)與線(xiàn)上機(jī)器手臂示教編程功能。這個(gè)視頻介紹AX58200 AxRobot
2022-03-08 10:07:30
項(xiàng)目名稱(chēng):基于外骨骼的仿生機(jī)器人控制系統(tǒng)試用計(jì)劃:1.申請(qǐng)理由本人為電子在專(zhuān)業(yè)在校學(xué)生,以智能機(jī)器人為研究方向,參加了許多區(qū)級(jí)國(guó)家級(jí)比賽并獲獎(jiǎng),想要借助發(fā)燒友的智能語(yǔ)音開(kāi)發(fā)板進(jìn)行深入的學(xué)習(xí)和探索,并
2020-02-25 16:01:04
復(fù)雜,對(duì)開(kāi)發(fā)板的要求較高,您公司這款開(kāi)發(fā)板性能滿(mǎn)足我們的要求,希望能試用。項(xiàng)目描述:我們與美國(guó)密歇根州立大學(xué)合作研發(fā)并在上海海洋大學(xué)研制了“微動(dòng)力仿生機(jī)器魚(yú)”,在多個(gè)機(jī)器魚(yú)的定位、導(dǎo)航和運(yùn)動(dòng)控制中,研究
2015-07-26 13:14:12
`這個(gè)視頻介紹亞信電子AX58200 AxRobot EtherCAT七軸助力控制機(jī)器手臂解決方案,此方案可適用于各種協(xié)作型機(jī)器人相關(guān)產(chǎn)品應(yīng)用。AxRobot機(jī)器手臂解決方案,利用亞信AX58200
2021-07-23 14:16:11
通訊SoC后,積極投入研發(fā)EtherCAT協(xié)作型機(jī)器人產(chǎn)品應(yīng)用技術(shù)。為了加速客戶(hù)導(dǎo)入工業(yè)以太網(wǎng)EtherCAT通信技術(shù),亞信電子今天推出AxRobot EtherCAT七軸助力控制機(jī)器手臂解決方案
2021-06-23 17:10:33
龍人四足機(jī)器人是一種仿生機(jī)器人,由Openduino控制板控制,有四條腿,每條腿兩個(gè)自由度,由兩個(gè)舵機(jī)驅(qū)動(dòng),能實(shí)現(xiàn)兩種步態(tài)行走。配有三個(gè)超聲波,實(shí)現(xiàn)大角度智能避障。標(biāo)準(zhǔn)演示程序有5個(gè)可愛(ài)的表演動(dòng)作。重要技術(shù)點(diǎn): 四足機(jī)器人的行走步態(tài)設(shè)計(jì)、舵機(jī)的梯形速度控制、多路舵機(jī)的協(xié)調(diào)控制
2016-03-24 16:17:53
手是模仿人類(lèi)自然手的機(jī)械假手。它可以做人手可以做的事情。這只手是用塑料作為原材料進(jìn)行 3D 打印的。對(duì)于 PCB,將邊框直接放置在具有精確尺寸的仿生手上,它有一個(gè) arduino nano 作為控制器
2022-07-04 08:01:01
`大自然是最優(yōu)秀的設(shè)計(jì)師。工程師們從大自然學(xué)習(xí)經(jīng)驗(yàn),將其運(yùn)用在工程上,這就是仿生學(xué)。仿動(dòng)物的機(jī)器人能幫助研究者理解動(dòng)物的運(yùn)動(dòng)和進(jìn)化,以及為什么它們能完成如此驚人的任務(wù)。除此之外,仿生機(jī)器人還有
2016-08-24 10:33:05
本帖最后由 紅塵。破 于 2016-8-19 14:59 編輯
今天整理資料時(shí)發(fā)現(xiàn)了一年前做的四足仿生機(jī)器人,當(dāng)時(shí)買(mǎi)了一個(gè)四足仿生機(jī)器人的骨架,畫(huà)了個(gè)板子,寫(xiě)了個(gè)測(cè)試代碼,能完成簡(jiǎn)單的行走,后面加了避障、顯示功能啥的,不過(guò)視頻資料沒(méi)了,只有簡(jiǎn)單行走的視頻,優(yōu)酷鏈接在下面評(píng)論
2016-08-19 14:59:33
四足機(jī)器人屬于復(fù)雜機(jī)電系統(tǒng),需要綜合生物、機(jī)械、電子、控制等學(xué)科內(nèi)容,具體涉及仿生機(jī)構(gòu)設(shè)計(jì)、靈巧運(yùn)動(dòng)機(jī)構(gòu)設(shè)計(jì)、高性能驅(qū)動(dòng)器制造,行走穩(wěn)定性控制、強(qiáng)化學(xué)習(xí)等在內(nèi)的多個(gè)研究方向。其中,機(jī)構(gòu)設(shè)計(jì)是保障四足
2021-09-15 06:54:01
適應(yīng)控制模型的變化。因此必須研制一種具有強(qiáng)大運(yùn)算處理能力、軟硬件結(jié)構(gòu)模塊化的機(jī)器蟹控制系統(tǒng)。 從作業(yè)任務(wù)來(lái)看,兩棲仿生機(jī)器蟹的主要設(shè)計(jì)目的是用于未來(lái)的兩棲軍事偵察,因此要求其具有自主性、智能化的特點(diǎn)
2019-07-26 08:25:28
機(jī)器人也是現(xiàn)在比較熱門(mén)的,尤其是仿生機(jī)器人的推出,更是震驚了世界,我也想親手做一個(gè),但是太復(fù)雜了只能想想。既然做機(jī)器人不現(xiàn)實(shí),那就做個(gè)機(jī)械手臂吧,畢竟做機(jī)器人也是從做機(jī)械手臂開(kāi)始的。所以就準(zhǔn)備用
2018-09-25 16:43:30
本文介紹多點(diǎn)電容觸摸屏設(shè)計(jì)有哪些設(shè)計(jì)挑戰(zhàn),和如何使用TTSP方案來(lái)幫助設(shè)計(jì)者面對(duì)這些挑戰(zhàn),使多點(diǎn)電容觸摸屏設(shè)計(jì)比以往更容易。
2021-04-06 09:05:59
研究目標(biāo)設(shè)計(jì)一款基于STM32的仿生機(jī)械手:(1)基于STM32的仿生機(jī)械手實(shí)現(xiàn)無(wú)線(xiàn)控制和有線(xiàn)控制。 (2)實(shí)現(xiàn)串口指令控制仿生機(jī)械手動(dòng)作。(3)實(shí)現(xiàn)仿生機(jī)械手具有多種工作模式。(4)實(shí)現(xiàn)數(shù)據(jù)手套
2022-01-07 06:55:18
有很多小伙伴喜歡在沒(méi)事的時(shí)候鼓搗一些機(jī)器人什么的,現(xiàn)在給大家分享一個(gè)仿生機(jī)器人開(kāi)源資料,喜歡的小伙伴可以看看。六足機(jī)器人系統(tǒng)基于仿生學(xué)原理,采用六足昆蟲(chóng)的機(jī)械結(jié)構(gòu),通過(guò)控制18個(gè)舵機(jī),采用三角步態(tài)
2020-10-10 09:57:11
、包括遞送,甚至施工、陪護(hù)等方面。隨著科學(xué)技術(shù)的不斷發(fā)展,仿生機(jī)器人的概念越來(lái)越豐富,它的應(yīng)用范圍也越來(lái)越寬廣。或許很快,這些仿生機(jī)器人就能進(jìn)入我們的日常生活中。`
2018-11-21 17:19:30
瑞士聯(lián)邦理工學(xué)院 Pascal Buholzer 和他的學(xué)生設(shè)計(jì)的Sepios水下仿生機(jī)器人,解決螺旋槳推進(jìn)器的水草纏繞和噪音問(wèn)題。
2015-01-13 15:52:06
機(jī)器手臂抓取實(shí)驗(yàn)機(jī)器手臂抓取實(shí)驗(yàn)機(jī)器手臂抓取實(shí)驗(yàn)
2013-10-08 09:32:59
`博雅工道研發(fā)了一款智能仿生機(jī)器魚(yú),該魚(yú)使用仿生技術(shù),以盒子魚(yú)為原型加以創(chuàng)造具有目標(biāo)識(shí)別、智能跟隨、水聲遙控、代碼開(kāi)源、防水技術(shù)、無(wú)線(xiàn)傳輸、智能存儲(chǔ)、PC端調(diào)試平臺(tái)等功能。應(yīng)用于競(jìng)賽、科研、教育創(chuàng)新`
2017-10-25 18:00:18
通過(guò)視覺(jué)傳感器獲取互動(dòng)表演者的手臂姿態(tài),揮動(dòng)雙手臂模仿表演者的動(dòng)作,實(shí)現(xiàn)對(duì)機(jī)器人的仿生模擬控制。邯鄲學(xué)舞機(jī)器人由一個(gè)視覺(jué)傳感器、兩個(gè)三自由度手臂、機(jī)器人身體和視覺(jué)處理控制器等組成;該機(jī)器人通過(guò)視覺(jué)傳感器獲取互動(dòng)表演者的手臂姿態(tài),揮動(dòng)雙手臂模仿表演者的動(dòng)作,實(shí)現(xiàn)對(duì)機(jī)器人的仿生模擬控制。
2016-03-28 11:42:25
龍人六足機(jī)器人是有六條腿的仿生機(jī)器人,每條腿有兩個(gè)自由度,由兩個(gè)角度舵機(jī)控制。控制器采用Stm32機(jī)器人控制器,通過(guò)編程控制實(shí)現(xiàn)12個(gè)電機(jī)協(xié)調(diào)的控制行走,實(shí)現(xiàn)對(duì)六足昆蟲(chóng)的仿生模擬。頭部有三個(gè)超聲波,實(shí)現(xiàn)大角度范圍的避障。重要技術(shù)點(diǎn):六條腿協(xié)調(diào)前進(jìn) 、后退、轉(zhuǎn)彎的算法,超聲波導(dǎo)航和避障
2016-03-23 17:49:48
龍人六足機(jī)器人龍人六足機(jī)器人是有六條腿的仿生機(jī)器人,每條腿有兩個(gè)自由度,由兩個(gè)角度舵機(jī)控制。控制器采用Stm32機(jī)器人控制器,通過(guò)編程控制實(shí)現(xiàn)12個(gè)電機(jī)協(xié)調(diào)的控制行走,實(shí)現(xiàn)對(duì)六足昆蟲(chóng)的仿生模擬。頭部有三個(gè)超聲波,實(shí)現(xiàn)大角度范圍的避障。重要技術(shù)點(diǎn):六條腿協(xié)調(diào)前進(jìn)、后退、轉(zhuǎn)彎的算法,超聲波導(dǎo)航和避障
2016-03-24 16:25:46
伺服機(jī)器手臂,顧名思義,是由六個(gè)伺服電機(jī)驅(qū)動(dòng)的機(jī)器手臂。既然是手臂,那么就有幾個(gè)關(guān)節(jié),大家可以聯(lián)想到,我們?nèi)祟?lèi)的手臂,除了肩、肘、腕這三個(gè)關(guān)節(jié)外,再加上手指的
2009-05-16 17:24:25 27
27 主要研究了基于新型正交六自由度并聯(lián)機(jī)構(gòu)設(shè)計(jì)的仿生型機(jī)器馬系統(tǒng)的運(yùn)動(dòng)學(xué)特性。首先分析了機(jī)器人的逆運(yùn)動(dòng)學(xué)方程,然后設(shè)計(jì)了模糊自適應(yīng)PID 控制器,最后給出了動(dòng)平臺(tái)做一
2009-12-31 15:50:339 下肢外骨骼康復(fù)機(jī)器人BEAR-A1利用仿生學(xué)、人體工學(xué)、機(jī)器人技術(shù),為下肢運(yùn)動(dòng)功能障礙者提供康復(fù)訓(xùn)練。通過(guò)對(duì)患者髖、膝關(guān)節(jié)提供助力完成康復(fù)訓(xùn)練,可以有效降低治療師工作強(qiáng)度,提高康復(fù)訓(xùn)練效率,提高患者
2023-09-20 17:31:33
本文以仿生機(jī)器蟹為設(shè)計(jì)對(duì)象,提出了基于DSP的機(jī)器蟹多層多目標(biāo)遞階控制系統(tǒng)方案,并對(duì)單步行足的軟、硬件設(shè)計(jì)做了詳細(xì)的闡述,為進(jìn)一步實(shí)現(xiàn)自主式的仿生步行機(jī)構(gòu)奠定了基
2011-08-09 11:26:27663 
針對(duì)目前架空輸電線(xiàn)路巡線(xiàn)機(jī)器人連續(xù)巡線(xiàn)能力低、對(duì)大型障礙物越障適應(yīng)能力弱的問(wèn)題,提出基于仿生學(xué)原理的巡線(xiàn)機(jī)器人越障模型。設(shè)計(jì)兩吊臂式巡線(xiàn)機(jī)器人,建立機(jī)器人的動(dòng)力學(xué)
2013-06-08 17:52:5849 前段時(shí)間,由英國(guó)研究團(tuán)隊(duì)研發(fā)的世界首個(gè)仿生人引起業(yè)界的爭(zhēng)議。機(jī)器變?nèi)祟?lèi)、機(jī)器人倫理隨之升級(jí)引發(fā)熱烈討論,仿生人將給人類(lèi)帶來(lái)什么?業(yè)界都是怎么看待仿生人的?對(duì)此,你又持何看法?
2013-11-30 11:46:575816 仿生機(jī)械學(xué)!資料來(lái)源網(wǎng)絡(luò),如有侵權(quán),敬請(qǐng)見(jiàn)諒
2015-11-20 15:16:050 還針對(duì)仿生機(jī)器魚(yú)的運(yùn)動(dòng)特點(diǎn),利用單片機(jī)進(jìn)行硬件系統(tǒng)設(shè)置,其中不僅有遙控發(fā)射接收電路,而且還有串行通訊電路和舵機(jī)控制等,盡力起來(lái)一個(gè)完整的硬件控制平臺(tái),并且對(duì)控制系統(tǒng)做了調(diào)試。還設(shè)計(jì)了控制算法,利用C語(yǔ)言的下位機(jī)開(kāi)發(fā)、規(guī)劃,并且完成了底層動(dòng)力系統(tǒng)程序的編寫(xiě)及調(diào)試。
2016-06-16 16:51:318 得益于人機(jī)交互、軟體機(jī)器人控制、機(jī)器人生物行走等新型技術(shù)的不斷發(fā)展,當(dāng)前世界范圍內(nèi)仿生機(jī)器人的研究工作已經(jīng)取得了一定成果。
2017-02-23 15:29:381104 Johnny Arm的先進(jìn)之處不僅僅是靈活,還能像科幻電影中的橋段一樣,使用大腦控制。可以看到,手臂上方還佩戴了一個(gè)Myo臂環(huán),用來(lái)捕捉肌肉電信號(hào)并傳送到假肢上,另外Johnny Matheny其實(shí)也做了一些小外科手術(shù),讓假肢直接與其上臂骨骼相連、并對(duì)神經(jīng)進(jìn)行了重新分配。
2017-11-24 16:15:444634 盤(pán)點(diǎn)德國(guó)仿生機(jī)器人,絕對(duì)讓你佩服得五體投地!
2018-01-02 10:52:529706 隨著對(duì)于仿生機(jī)器人認(rèn)識(shí)的不斷深化,人們對(duì)其的研究也走向了“第四階段”:即構(gòu)建結(jié)構(gòu)與生物特征一體化的類(lèi)生命系統(tǒng),強(qiáng)調(diào)仿生機(jī)器人不僅具有生物的形態(tài)特征和運(yùn)動(dòng)方式,同時(shí)具備生物的自我感知、自我控制等性能特性,更接近生物原型。目前大熱仿生腦和仿生神經(jīng)也屬于此類(lèi)方向。
2018-07-06 15:44:002714 機(jī)械系統(tǒng),其運(yùn)動(dòng)局限于二維平面,無(wú)法克服許多山區(qū)崎嶇的地形。六足機(jī)器人具有跨障能力,可以克服崎嶇的地形,且機(jī)器人比人類(lèi)更能承受苛刻的工作環(huán)境,因此可以運(yùn)用在許多危險(xiǎn)的工作,例如火山的研究或其他星球的探測(cè)等。
2018-02-20 18:15:0018335 
利用ADAMS軟件虛擬樣機(jī)技術(shù),設(shè)計(jì)了液壓驅(qū)動(dòng)的四足仿生機(jī)器人單腿機(jī)械結(jié)構(gòu)。通過(guò)分析四足哺乳類(lèi)動(dòng)物身體結(jié)構(gòu)及運(yùn)動(dòng)特性,設(shè)計(jì)了仿生機(jī)器人的機(jī)械機(jī)構(gòu),確定了機(jī)器人腿部自由度配置,建立了仿真模型。根據(jù)動(dòng)物
2018-03-01 11:41:123 德國(guó)自動(dòng)化技術(shù)廠商Festo(費(fèi)斯托)推出來(lái)自其仿生學(xué)習(xí)網(wǎng)絡(luò) (Bionic Learning Network)最新成果的仿生機(jī)器人,BionicWheelBot是一款獨(dú)具特色的行走機(jī)器人,以摩洛哥后翻蜘蛛為靈感,能夠模仿摩洛哥后翻蜘蛛以翻滾模式在復(fù)雜地形上移動(dòng)。
2018-03-31 10:08:189722 近日,據(jù)外媒報(bào)道,德國(guó)自動(dòng)化技術(shù)廠商Festo推出來(lái)自其仿生學(xué)習(xí)網(wǎng)絡(luò)最新成果的兩款仿生機(jī)器人,一款可以翻滾的蜘蛛機(jī)器人BionicWheelBot和一款飛狐機(jī)器人BionicFlyingFox
2018-04-08 07:08:002674 一般機(jī)器人手臂有3個(gè)自由度,即手臂的伸縮、左右回轉(zhuǎn)和升降 (或俯仰)運(yùn)動(dòng)。手臂回轉(zhuǎn)和升降運(yùn)動(dòng)是通過(guò)機(jī)座的立柱實(shí)現(xiàn)的,立柱的橫向移動(dòng)即為手臂的橫移。
2018-04-18 09:48:5715958 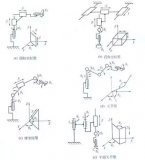
Festo增加了機(jī)器人的動(dòng)物園,創(chuàng)造了一個(gè)機(jī)器人海鷗,重量只有450克(15.87盎司),并擁有1.96米(6.4英尺)翼展。被稱(chēng)為智能鳥(niǎo),超輕型飛行機(jī)器人靈感來(lái)自鯡魚(yú)鷗,可以起飛,飛行和陸地自主,沒(méi)有任何額外的驅(qū)動(dòng)系統(tǒng)的幫助。
2018-04-26 09:27:006664 近年來(lái),仿生科技正在快速發(fā)展,尤其是在機(jī)器人行業(yè),從蜘蛛到鳥(niǎo)類(lèi),從章魚(yú)到蟑螂,各種生物為技術(shù)進(jìn)步提供了源源不斷的靈感,仿生科技也成為機(jī)器人技術(shù)發(fā)展最快的領(lǐng)域之一。
2018-05-12 10:12:264664 仿生機(jī)器魚(yú)實(shí)驗(yàn)平臺(tái)屬于教育部和北京郵電大學(xué)共同出資支持的一項(xiàng)“國(guó)家級(jí)大學(xué)生創(chuàng)新性實(shí)驗(yàn)計(jì)劃”項(xiàng)目,是一個(gè)集光、機(jī)、電、流體、智能于一體的實(shí)驗(yàn)平臺(tái),研究?jī)?nèi)容包括:仿生機(jī)器魚(yú)機(jī)械結(jié)構(gòu)的研究,推薦效率的研究以及控制性能的研究。
2018-06-08 10:16:305176 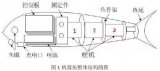
如果20年后科技發(fā)展迅速,機(jī)器仿生人出現(xiàn)了,你會(huì)不會(huì)也想購(gòu)買(mǎi)一臺(tái)?是否想過(guò)新時(shí)代會(huì)因仿生機(jī)器人的出現(xiàn)而有何轉(zhuǎn)變?
2018-08-15 17:34:155709 國(guó)內(nèi)首度自主研發(fā)機(jī)器仿生手掌取代過(guò)往機(jī)器手臂末端的夾爪,以逼近人類(lèi)真實(shí)手掌的多自由度讓手臂在夾取時(shí)的動(dòng)作更細(xì)膩靈敏。加上其運(yùn)用碳纖復(fù)合材料,重量上更與手機(jī)相差無(wú)幾。
2018-09-08 08:47:004113 在YouTube上點(diǎn)擊量超高的波士頓動(dòng)力公司,預(yù)計(jì)將會(huì)在2019年推出結(jié)構(gòu)復(fù)雜的仿生機(jī)器人。消息一出,人們目光即被拉向了機(jī)器人領(lǐng)域一大分支——仿生機(jī)器人。
2018-09-28 14:48:165006 仿生機(jī)器人就是模仿自然界中生物的外部形狀、運(yùn)動(dòng)原理和行為方式的系統(tǒng),能從事生物特點(diǎn)工作的機(jī)器人。主要的仿生機(jī)器人包括三大類(lèi):一是仿人機(jī)器人,二是仿生物機(jī)器人,三是生物機(jī)器人。
2018-12-23 16:19:4811259 超逼真仿生機(jī)械手
2019-03-11 09:45:056250 本文檔的主要內(nèi)容詳細(xì)介紹的是使用51單片機(jī)設(shè)計(jì)六足仿生機(jī)器人的詳細(xì)資料說(shuō)明。
2019-07-03 17:42:0012 以“機(jī)器智聯(lián),賦能萬(wàn)物”為主題第六屆中國(guó)機(jī)器人峰會(huì)暨智能經(jīng)濟(jì)人才峰會(huì)將于5月8日至10日在浙江寧波余姚舉行,為凸顯峰會(huì)“國(guó)際化、高端化、專(zhuān)業(yè)化、實(shí)效化的辦會(huì)理念”,集中展示國(guó)內(nèi)外最具代表性的機(jī)器人產(chǎn)品和技術(shù)成果,本屆峰會(huì)設(shè)有展覽展示板塊。
2019-05-06 08:50:503983 普渡大學(xué)研究團(tuán)隊(duì)根據(jù)蜂鳥(niǎo)的身體構(gòu)造和行為模式,制造了一款仿生蜂鳥(niǎo)機(jī)器人。無(wú)論從形態(tài)、動(dòng)作,都非常逼真。使用機(jī)器學(xué)習(xí)算法進(jìn)行訓(xùn)練,仿生機(jī)器人“知道”如何像蜂鳥(niǎo)一樣自行移動(dòng),例如辨別何時(shí)執(zhí)行逃生機(jī)動(dòng)。
2019-05-17 16:06:263702 韓國(guó)國(guó)防部日前宣布將研發(fā)軍用仿生機(jī)器人,提升防御與偵察能力,強(qiáng)化武裝部隊(duì)。
2019-06-07 14:44:002552 據(jù)報(bào)道,韓國(guó)國(guó)防部日前宣布將研發(fā)軍用仿生機(jī)器人,以提升防御與偵察能力,增強(qiáng)武裝部隊(duì)的戰(zhàn)斗力水平。預(yù)計(jì)這類(lèi)仿生機(jī)器人將于2024年進(jìn)入到韓國(guó)軍隊(duì)服役。
2019-06-10 09:36:272875 軍事觀察員李莉分析,韓國(guó)在軍用仿生機(jī)器人領(lǐng)域發(fā)力,不僅是為了滿(mǎn)足未來(lái)作戰(zhàn)需求,也是出于爭(zhēng)奪第四次工業(yè)革命戰(zhàn)略制高點(diǎn)的考慮。
2019-06-10 14:46:162752 據(jù)韓聯(lián)社報(bào)道,韓國(guó)國(guó)防部日前宣布將研發(fā)軍用仿生機(jī)器人,提升防御與偵察能力,強(qiáng)化武裝部隊(duì)。
2019-06-12 09:30:192901 來(lái)自卡內(nèi)基梅隆大學(xué)與明尼蘇達(dá)大學(xué)的研究人員日前利用無(wú)創(chuàng)的腦機(jī)接口(BCI)技術(shù),成功開(kāi)發(fā)出第一款由大腦控制的機(jī)器人手臂,具有連續(xù)跟蹤計(jì)算機(jī)光標(biāo)的能力。
2019-06-28 09:46:42812 這是目前國(guó)內(nèi)研發(fā)生產(chǎn)的第一臺(tái)5G動(dòng)作傳感仿生機(jī)器人。它使用新型芯片,將三維空間動(dòng)態(tài)控制、平衡原理與先進(jìn)的機(jī)械設(shè)計(jì)和尖端電子感知技術(shù)相結(jié)合,來(lái)操縱機(jī)器人。
2019-07-22 09:32:153844 Festo是一家德國(guó)工業(yè)自動(dòng)化企業(yè),多年來(lái)一直致力于仿生機(jī)器人的研發(fā)。在Festo展臺(tái)的一角,有一個(gè)兩米左右的圓形水箱,一只仿生水母機(jī)器人擺動(dòng)著透明的觸手上下浮動(dòng)。
2019-08-23 09:56:38563 控制系統(tǒng)作為四足仿生機(jī)器人最重要也是最基礎(chǔ)的組成部分,其性能的好壞直接對(duì)四足仿生機(jī)器人運(yùn)動(dòng)控制效果產(chǎn)生巨大的影響。在機(jī)器人研究的早期,控制系統(tǒng)一般采用單級(jí)處理器的集中控制模式,利用一臺(tái)運(yùn)算速度快
2019-09-27 08:00:000 “仿生機(jī)器人”是指模仿生物、從事生物特點(diǎn)工作的機(jī)器人。同時(shí)關(guān)于動(dòng)物如何移動(dòng)、處理危險(xiǎn)和保存能量的特別見(jiàn)解和觀察不僅有趣,而且對(duì)機(jī)器人領(lǐng)域的科學(xué)家也很有價(jià)值。在德國(guó)漢堡舉行的IROS年會(huì)上,類(lèi)似動(dòng)物的機(jī)器人運(yùn)動(dòng)做出了這樣的貢獻(xiàn)。
2020-03-05 09:26:313926 eople肢體受傷嚴(yán)重到需要截肢有幾個(gè)選項(xiàng)來(lái)恢復(fù)有意義的功能在他們的胳膊或腿。
2020-03-31 10:43:291639 近日,《新英格蘭醫(yī)學(xué)雜志》(NEJM)報(bào)告了三位手臂截肢的瑞典患者,他們使用可以體驗(yàn)觸摸感同時(shí)受精神控制的手臂假肢,并利用這項(xiàng)技術(shù)生活了數(shù)年。
2020-06-03 11:09:031921 7月6日消息,德國(guó)電氣自動(dòng)化公司Festo利用仿生學(xué)習(xí)網(wǎng)絡(luò)開(kāi)發(fā)了BionicSwifts,一共五只仿生機(jī)器鳥(niǎo),每只翼展為68厘米,體長(zhǎng)44.5厘米,體重為42克。在機(jī)身內(nèi)部,F(xiàn)esto塞進(jìn)了撲翼機(jī)構(gòu)
2020-07-06 14:51:545894 近日, 425臺(tái)云洲智能“海豚1號(hào)”水面救生機(jī)器人在山東壽光市免費(fèi)交付漁民使用,實(shí)現(xiàn)了水面救生機(jī)器人在全國(guó)海洋漁業(yè)領(lǐng)域配備,將切實(shí)增強(qiáng)漁船漁民海上自救和互救能力,有效提高海洋漁業(yè)安全生產(chǎn)保障水平和應(yīng)對(duì)突發(fā)事件的能力,助力智慧漁業(yè)發(fā)展。
2020-09-03 10:25:322141 使用具有同等能力和效率的人工設(shè)備來(lái)取代人手,是一個(gè)長(zhǎng)期的挑戰(zhàn)。即使是最先進(jìn)的假肢手臂,也無(wú)法達(dá)到人類(lèi)手的復(fù)雜性、靈活性和適應(yīng)性。當(dāng)前我們能夠見(jiàn)到的上肢假肢系統(tǒng),只能稱(chēng)為一種工具,而不能成為失臂或失手者的替代品。
2020-09-25 16:08:222645 ,我們研究蝙蝠而發(fā)明了雷達(dá)。 而現(xiàn)在,人類(lèi)開(kāi)始進(jìn)一步對(duì)大自然探索,我們需要擁有其他生物的能力,仿生機(jī)器人開(kāi)始越來(lái)越多的出現(xiàn)在人類(lèi)的世界里,它們像真實(shí)的動(dòng)物一樣,擁有特殊的能力,用于從事人類(lèi)無(wú)法勝任的工作!上周我
2020-11-14 10:30:002309 澳大利亞墨爾本莫納什大學(xué)的一組研究人員稱(chēng),經(jīng)過(guò)10年的努力,他們成功研制出了一種仿生裝置,可以通過(guò)腦部植入物幫助盲人恢復(fù)視力。
2020-09-26 11:28:201851 相信我們不少人都聽(tīng)說(shuō)過(guò)仿生機(jī)器人,這一產(chǎn)品被稱(chēng)為我們?nèi)祟?lèi)的好朋友。那目前它的發(fā)展如何呢?
2020-11-10 09:33:477135 據(jù)外媒CNET報(bào)道,英國(guó)游戲玩家Daniel Melville天生沒(méi)有右手,由于電子游戲發(fā)行商 Konami(科樂(lè)美)和Open Bionics的幫助,他現(xiàn)在擁有了一只超酷的新仿生手臂,它是基于《合金裝備》中毒蛇(Venom Snake)仿生手臂的設(shè)計(jì)。
2020-11-18 14:58:251452 2020年11月22日,南極熊獲悉,日本視頻游戲開(kāi)發(fā)商Konami(科樂(lè)美)與假肢設(shè)計(jì)公司Open Bionic合作,推出了一款3D打印的仿生手臂,靈感來(lái)自于《 Metal Gear Solid
2020-11-23 10:53:382450 11月27日消息,據(jù)天眼查公開(kāi)信息顯示,近日,京東數(shù)科海益信息科技有限公司新增多條仿生機(jī)器人相關(guān)專(zhuān)利信息。專(zhuān)利名稱(chēng)為關(guān)節(jié)連接組件、仿生手及仿生機(jī)器人;手指外骨骼單元和手套外骨骼;便攜式生物識(shí)別裝置
2020-11-27 16:04:161779 近日,京東數(shù)科海益信息科技有限公司新增多條“仿生機(jī)器人”的相關(guān)專(zhuān)利信息。該專(zhuān)利名為關(guān)節(jié)連接組件、仿生手以及仿生機(jī)器人;手指外骨骼單元手套外骨骼。
2020-12-06 09:01:002527 按照使用環(huán)境的不同,又可以將機(jī)器人分為水下仿生機(jī)器人,空中仿生機(jī)器人和地面仿生機(jī)器人。
2020-12-14 16:10:0711853 仿生機(jī)器人索菲亞于2016年公開(kāi)亮相之后,就在美國(guó)走紅。據(jù)《Metro》新聞網(wǎng)1月25日?qǐng)?bào)道,如今制造索菲亞的機(jī)器人公司又開(kāi)始了新的征程,計(jì)劃在年底前量產(chǎn)機(jī)器人。
2021-01-29 10:02:522163 手進(jìn)行抓取、轉(zhuǎn)移工件或料理東西的機(jī)電一體化自動(dòng)裝置。仿生機(jī)械手一般用什么電機(jī)? 超聲電機(jī)作為一種新型的微電機(jī),不像傳統(tǒng)的電機(jī)那樣,利用電磁的交叉力來(lái)獲得其運(yùn)動(dòng)和力矩。超聲電機(jī)則是利用壓電陶瓷的逆壓電效應(yīng)和超
2021-07-13 17:31:182086 ? (彼之良仿生智能機(jī)器人) 仿生機(jī)器人正朝著智能化方向發(fā)展 2021世界機(jī)器人大會(huì)在北京開(kāi)幕。在上半年一系列的國(guó)家支持政策和整體環(huán)境,讓機(jī)器人產(chǎn)業(yè)有了迅猛發(fā)展,企業(yè)從中得到了很大的發(fā)展空間和機(jī)會(huì)
2021-09-13 16:16:48456 仿生機(jī)器魚(yú)實(shí)驗(yàn)平臺(tái)屬于教育部和北京郵電大學(xué)共同出資支持的一項(xiàng)“國(guó)家級(jí)大學(xué)生創(chuàng)新性實(shí)驗(yàn)計(jì)劃”項(xiàng)目,是一個(gè)集光、機(jī)、電、流體、智能于一體的實(shí)驗(yàn)平臺(tái),研究?jī)?nèi)容包括:仿生機(jī)器魚(yú)機(jī)械結(jié)構(gòu)的研究,推薦效率的研究
2022-02-11 17:14:528 個(gè)關(guān)節(jié)伺服電機(jī)最大輸出扭矩32N.m,最大轉(zhuǎn)速220rpm,對(duì)于消費(fèi)級(jí)的機(jī)器狗的自主運(yùn)動(dòng)是足夠了的,如果需要負(fù)載能力那該怎么辦呢? 設(shè)想一下未來(lái)仿生機(jī)器人的使用場(chǎng)景。 陪伴玩耍和互動(dòng)這是機(jī)器狗的基礎(chǔ)功能,如果讓它去樓下把剛買(mǎi)的菜
2022-04-06 14:46:486064 
最近市面上出現(xiàn)多個(gè)公司推出的四足仿生機(jī)器狗,比如小米的“鐵蛋”,小鵬推出的可以騎的機(jī)器馬,云深處的巡檢機(jī)器狗,包括國(guó)內(nèi)多家都推出了自己的機(jī)器狗型號(hào),在宣傳和推薦的同時(shí),大家都在思考和暢想未來(lái)的機(jī)器
2022-04-07 10:26:383113 
介紹亞信電子AX58200 AxRobot EtherCAT從站七軸助力控制機(jī)器手臂解決方案的線(xiàn)上碰撞防護(hù)功能。 AX58200 AxRobot機(jī)器手臂解決方案,利用亞信AX58200
2022-12-05 11:12:00554 亞信電子AX58200 AxRobot支持離線(xiàn)與線(xiàn)上機(jī)器手臂示教編程功能。這個(gè)視頻介紹AX58200 AxRobot EtherCAT從站七軸助力控制機(jī)器手臂解決方案的線(xiàn)上示教編程功能
2022-12-05 11:12:00829 雷軍展示全尺寸人形仿生機(jī)器人 美好即將發(fā)生 小米十二周年之際小米創(chuàng)始人、CEO雷軍進(jìn)行了2022年的重磅年度演講,雷軍展示全尺寸人形仿生機(jī)器人;特別讓人驚喜的One More Thing:小米
2022-08-12 20:37:091083 
電子發(fā)燒友網(wǎng)站提供《通過(guò)基于CNN的EMG識(shí)別進(jìn)行實(shí)時(shí)仿生手臂控制.zip》資料免費(fèi)下載
2022-10-24 10:03:334 人“CyberDog”都曾火爆全網(wǎng)。 機(jī)器狗的開(kāi)發(fā)需要硬件、軟件及運(yùn)動(dòng)行為三者達(dá)到協(xié)調(diào),并不是一件容易的事,而在傳智教育舉辦的《仿生機(jī)器狗訓(xùn)練營(yíng)》中,特等獎(jiǎng)獲得者劉瀟翔脫穎而出,他從0-1打造了一個(gè)基于OpenAtom OpenHarmony(以下簡(jiǎn)稱(chēng)“OpenHarmony”
2022-12-09 09:15:02598 電子發(fā)燒友網(wǎng)站提供《構(gòu)建可幫助人們做早餐的桌面智能機(jī)器人手臂.zip》資料免費(fèi)下載
2022-12-28 10:36:413 柔軟機(jī)器人正逐漸成為機(jī)器人領(lǐng)域的新熱門(mén)。最近,來(lái)自中國(guó)杭州浙江大學(xué)的工程師團(tuán)隊(duì)研發(fā)了一種蝠鲼仿生機(jī)器魚(yú),其板載系統(tǒng)十分完整,包括供電和遙控等部分。
2023-02-28 10:56:39601 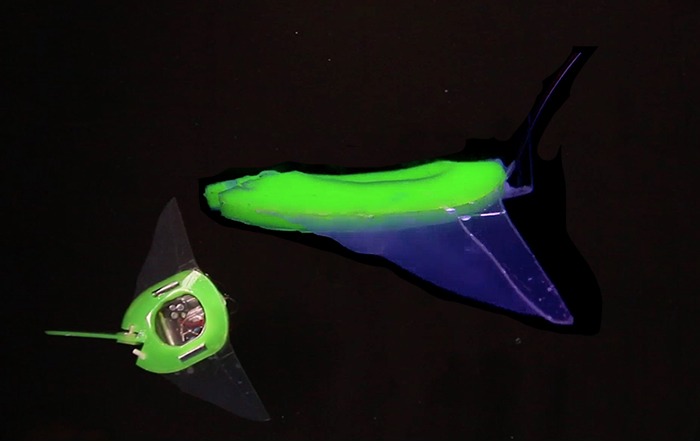
近年來(lái),微納仿生機(jī)器人在疾病精準(zhǔn)診斷、藥物研發(fā)和遞送以及MEMS/NEMS等前沿應(yīng)用領(lǐng)域受到越來(lái)越多的關(guān)注。
2023-08-03 09:43:29609 
 電子發(fā)燒友App
電子發(fā)燒友App












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論