相對于LOAM算法,LeGo-LAOM能夠進行地面優化,同時保證了輕量級,也加入了回環檢測模塊。本課....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-11 10:21
?2132次閱讀
VPS全稱為Visual Positioning System,即視覺定位系統。
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-09 09:27
?1456次閱讀

obj_points、img_points_left和img_points_right分別是存儲每個....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-08 16:28
?3074次閱讀
雙目標定的方法有很多,常用的是基于棋盤格圖案的張氏標定法,它利用多幅不同角度拍攝的棋盤格圖像,通過提....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-06 14:35
?1385次閱讀
在全局最小二乘擬合中,我們假設整個域中都可以用一個單一的多項式精確地描述數據所代表的函數。但是,對于....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-06 14:33
?1198次閱讀

受簡化慣性傳感器系統(RISS)[23]的啟發,我們開發了視覺慣性車輪里程計(VIWO)。具體而言,....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-06 14:30
?1961次閱讀

基于坐標的網絡將輸入點坐標嵌入到高維空間,使用正弦或其他頻率嵌入,使它們能夠捕捉高頻細節,這對高保真....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-02 16:39
?3338次閱讀

移動機器人需要一種對環境干擾具有魯棒性的可靠位姿估計器,為此,慣性測量單元(IMU)發揮了重要作用,....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-02 14:55
?1346次閱讀
與以往基于學習的視覺定位算法的區別在于:以前的方法往往需要數小時或數天的訓練,而且每個新場景都需要再....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-01 14:38
?796次閱讀

相機標定是通過輸入帶有標定patter的標定板來獲得相機參數的一個過程。實際的光學成像是一套非常復雜....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-01 14:36
?979次閱讀

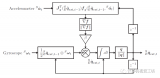
Madgwick算法與Mahony算法相比,最大的不同之處是如何對待加速度計估計的誤差。Mahony....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 05-31 11:12
?4220次閱讀
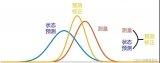
卡爾曼濾波是一種利用線性系統狀態方程,通過系統輸入輸出觀測數據,對系統狀態進行最優估計的算法。
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 05-30 09:20
?1882次閱讀
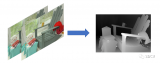
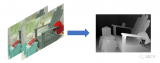
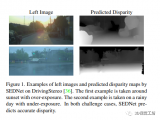
? 本文提出了一種新的深度立體網絡訓練框架,可以從使用單個手持相機拍攝的圖像序列中生成立體訓練數據。....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 05-29 10:49
?1301次閱讀

面向點云處理領域的基礎工具課,主要以Python為編程主要語言,介紹Open3D庫的使用方法。課程特....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 05-29 09:49
?6249次閱讀

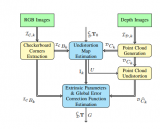
? ? 本文提出了一種生產化的端到端立體深度感知系統設計,可以完成預處理、在線立體校正和立體深度估計....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 05-26 16:12
?951次閱讀

所以,這篇arXiv的論文提出了一個簡單而有效的基于SAM大模型的視聽定位和分割框架,即AV-SAM....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 05-24 16:00
?893次閱讀

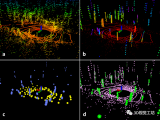
為了處理上述的問題,我們提出了SDMNet,一種新的由稀疏到密集的針對大規模室外點云的配準方法。稀疏....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 05-24 15:53
?1551次閱讀

常見的消費級RGB-D相機具有粗略的內參和外參校準數據的,通常無法滿足許多機器人應用所需的精度要求。
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 05-23 09:28
?2032次閱讀
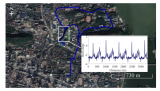
? 摘要 高度精確且魯棒的定位能力對于城市場景中自動駕駛車輛(AVs)至關重要。傳統的基于視覺的方法....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 05-22 11:42
?999次閱讀

城市場景中具有各種復雜的道路條件,例如城市峽谷、隧道、高架等,這使得AVs定位更具有挑戰性。為了在該....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 05-22 11:38
?1150次閱讀

首先要指出的是,Mahony算法假設加速度計測量的加速度完全由重力提供,即物體本體運動產生的加速度可....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 05-22 09:22
?3246次閱讀

首先要指出的是,Mahony算法假設加速度計測量的加速度完全由重力提供,即物體本體運動產生的加速度可....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 05-22 09:18
?5855次閱讀

給定一對矯正后的圖像(IL, IR),目標是估計一個視差場d,使每個IL中的像素都有水平的位移。與R....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 05-19 09:24
?1255次閱讀

第二個是我們防止 3D 片段/對象之間的過度判別,并通過 Siamese 對應網絡中的自適應特征學習....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 05-17 09:28
?1126次閱讀

立體匹配是計算機視覺的重要領域,通過給定一對經過校正的圖像,計算對應像素之間的位移,即視差。
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 05-16 09:05
?2757次閱讀

本文的研究背景是建立在攝像機校準技術的基礎上,提出了一種新的技術,在不需要高昂成本設備(如正交平面)....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 05-15 15:54
?1509次閱讀

立體匹配網絡在一種稱為成本體積(cost volume)的體積上運行,該體積在每個像素處匯聚每個可能....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 05-15 15:12
?1040次閱讀
立體匹配領域中的數據驅動方法占據了主導地位。為了提高準確性,許多研究者采用了3D卷積和金字塔結構。為....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 05-12 16:20
?812次閱讀

盡管光場相機的空間分辨率較低,但是這一問題,有望隨著感光芯片的技術進步而解決。機器閱讀并去理解圖像,....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 05-10 14:29
?2104次閱讀

其中表示旋轉矩陣,表示平移向量, 是殘差誤差。在實踐中,由于這個問題的非凸性,同時找到對應關系和估計....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 05-10 11:42
?919次閱讀



 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1

