用于SLAM的神經隱含可擴展編碼
我們提出了NICE-SLAM,一個密集的RGB-D SLAM系統,它具有實時性、可擴展性、預測性和對....
基于點到極線度量的用于道路車輛的雙目視覺里程計
精準定位是所有自動駕駛系統的基礎組成模塊。本文,我們專注于雙目相機,提出一種名叫SOFT2的新方法,....
NeRF的研究目的是合成同一場景不同視角下的圖像
為了順利完成上面過程,我們可能需要維護碩大無朋Tensor來表示輻射場,查表獲取RGB和密度。這里一....
決策規劃,全局路徑規劃常用算法
如果給圖的每條邊規定一個方向,那么得到的圖稱為有向圖,其邊也稱為有向邊,如圖10所示。在有向圖中,與....
TransGeo:第一種用于交叉視圖圖像地理定位的純Transformer方法
提出了一種注意力引導的非均勻裁剪策略,去除參考航空圖像中的大量非信息補丁以減少計算量,性能下降可忽略....
ORB-SLAM3與ORB-SLAM2相比有哪些優勢呢?
自主導航是機器人基礎性和關鍵性技術,是機器人實現其他更高級任務的前提。視覺 SLAM (Simult....
通過計算機視覺和NodeJS實現燈光自動化方案分享
“計算機視覺,通常縮寫為CV,被定義為一個研究領域,旨在開發幫助計算機‘看到’和理解照片和視頻等數字....
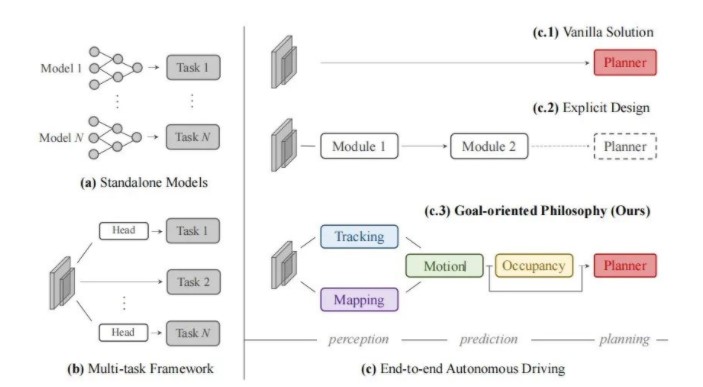
神經渲染技術在自動駕駛領域應用
近年來,自動駕駛技術發展突飛猛進,很多在實驗室中的實驗性項目已經逐步走向市場大眾。然而時至今日,自動....
Windows+VSCode配置OpenCV C++一站式開發調試環境教程
首先,打開OpenCV-MinGW-Build,找到對應的Releases版本。這里以OpenCV-....
如何使用純格雷碼進行三維重建?
對于新手來說,使用格雷碼做單目結構光三維重建是一個入門級的訓練。但是在復現時往往會遇到一個問題,明明....
使用USD開發數字孿生項目?試試在NVIDIA Omniverse寫代碼
上面提到的Omniverse 的3D設計協作和仿真,是指在Omniverse 平臺內,三維工作人員之....
一個基于學習的LiDAR點云3D線特征分割和描述模型
這個工作來自于浙江大學和DAMO academy。在點云配準領域,盡管已經有很多方法被提出來,但是無....
無需實例或類級別3D模型的對新穎物體的6D姿態追蹤
跟蹤RGBD視頻中物體的6D姿態對機器人操作很重要。然而,大多數先前的工作通常假設目標對象的CAD ....
434名貢獻者、3300多次代碼提交的PyTorch最新版本1.11來了
大家都知道,PyTorch是Facebook在2017年開源的一個針對深度學習的張量庫。它憑借容易上....
用于3D激光雷達SLAM回環檢測的實時詞袋模型BoW3D
Lego-LOAM是基于軌跡位姿方法的回環檢測,使用KDtree尋找當前位姿的歷史最近位姿,之后把歷....
一種融合網絡RADIANT來解決雷達-攝像機關聯的方案
作為一種能夠直接測量深度的傳感器,其相較于Lidar存在較大的誤差,因此利用雷達本身精度難以精確地將....
一種有效將3D點云分割成平面組件的多分辨率方法
在實驗中,將改方法與使用 SegComp 數據庫的最先進方法進行了比較。實驗結果表明,我們以高幀率和....
面向智能移動平臺的語義定位與建圖
通常來說基于機載或車載的傳感器,圖 1 是實驗室自己的感知采集平臺,平臺上搭載了不同傳感器,包括激光....
目標檢測正負樣本區分策略和平衡策略總結
rpn head的輸出是包括分類和回歸,分類是二分類,只區分前景和背景;回歸是僅僅對于前景樣本(正樣....
Maplab 2.0發布:多傳感器融合的SLAM框架
在圖2中,建圖節點在每個機器人上運行,并將傳感器數據收集到子地圖中,這些子地圖被傳遞到集中式服務器,....
一種基于相位靶標的攝像機標定迭代畸變補償算法
相機畸變是影響相機標定精度的關鍵因素。由于畸變補償不準確,傳統的標定方法不能滿足要求較高標定精度的測....
高分辨率、實時的手持物體360°三維模型重建結構光技術
為了從不同的視圖獲得和對齊物體的三維形狀,通常需要儀器輔助來執行三維配準[7–9]。常見的輔助儀器包....
基于覆蓋分數的采樣方法用于視覺定位問題
為什么使用連續學習,它與一般的深度學習聯合訓練所有場景數據有何不同?連續學習是不斷從傳入的數據流中學....
基于PGO方法實現快速且精確地求解SLAM優化和估計問題
本文組織如下。第二節描述通用的非線性圖優化以及這四種方法中的每一種。實驗是本文的主要部分,在第三節中....
一個實時單目追蹤和稠密建圖的算法框架TANDEM算法研究
簡單總結,TANDEM使用了稠密追蹤前端和稀疏后端優化相結合的方式來提高追蹤性能。
立體匹配:經典算法Fast Bilateral Solver
而下面左圖是OpenCV的SGBM算法得到的視差圖,右邊則是通過我今天要介紹的算法處理后的視差圖。看....
強勢的點云處理神經網絡PointNe介紹
PointNet++是Charles R. Qi團隊在PointNet論文基礎上改進版本,其核心是提....
Global SfM和ncremental SfM知識講解
Sfm 可以分為以下幾類:Global SfM、Incremental SfM、Hybrid SfM....





 工商網監
工商網監