




適用于激光SLAM的點云全局特征描述子回環檢測方案
目前,SLAM算法通過估計的相鄰幀之間的位姿變換不斷疊加進行位姿信息計算,隨著巡檢時間的增加,每次位....






怎樣才叫真正理解卡爾曼濾波Kalman Filter?
卡爾曼濾波算法:卡爾曼濾波算法包括預測、更新和估計三個步驟。其中,預測步驟通過狀態的動態方程來預測系....
MAE再發力,跨模態交互式自編碼器PiMAE席卷3D目標檢測領域
MAE以其簡單的實現方式、強大的視覺表示能力,可以在很多基礎視覺任務中展現出良好的性能。但是目前的工....
悉尼大學最新綜述:深度學習圖像摳圖
自深度學習出現之后,研究者設計出了多種多樣的基于卷積神經網絡的解決方案。和傳統方法一樣,早期的深度學....
雙視圖幾何:你真的理解嗎?
其實這部分內容在大多數課程和教材中都有涉及,很多人可能也覺得很簡單,有一定的套路可言,但是如標題所說....
介紹一種基于編碼器合成里程計的方案
摘要:本文主要分析輪式移動機器人的通用里程計模型,并以兩輪差速驅動機器人的里程計計算為案例,給出簡化....
連放4款UWB芯片新品!這家創企要捅破行業天花板
UWB技術在抗干擾性、高定位精度等方面的優勢正在消費級市場凸顯。全球市研機構ABI Research....
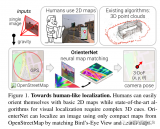
Limap:基于3D line的重建算法
但是基于特征點構建點云地圖在沒有足夠穩定的關鍵點去檢測匹配的時候,比如室內場景,往往效果不好。但是這....
利用TRansformer進行端到端的目標檢測及跟蹤
多目標跟蹤(MOT)任務的關鍵挑戰是跟蹤目標下的時間建模。現存的用檢測跟蹤的方法采用簡單的heuri....
決策規劃系列:運動規劃常用算法
有了全局路徑參考信息,有了局部環境信息了,有了行為決策模塊輸入的決策信息,下一步自然而然的就要進行運....
NeuralLift-360:將野外的2D照片提升為3D物體
從3D點云中生成可渲染的3D網格:使用一個基于深度學習的方法來將點云轉換為可渲染的3D網格。具體地,....
一文詳解激光雷達原理之光學原理
905nm也好,1550nm也好,在自然光光譜中占比重較小,即在相同的自然光強下,這個波段的強度較低....
基于優化的多傳感器全局位姿估計框架
精確狀態估計是自主機器人的基礎問題。為了實現局部精確且全局無漂移的狀態估計,通常將具有互補性質的多傳....
決策規劃:行為決策常用算法
在基于規則的方法中,有限狀態機(FiniteStateMaechine,FSM)成為最具有代表性的方....
英偉達新方法入選CVPR 2023:對未知物體的6D姿態追蹤和三維重建
這種方法適用于任意剛性物體,即使視覺紋理大部分確實,僅需在第一幀中分割出物體,不需要任何額外的信息,....





 工商網監
工商網監