CAN總線上傳輸的信息稱為報文,當總線空閑時任何連接的單元都可以開始發送新的報文。
2022-09-26 14:15:52 12197
12197 CAN總線上傳輸的信息稱為報文,當總線空閑時任何連接的單元都可以開始發送新的報文。
2022-09-28 15:20:401014 
目前在市場上的商用車和工業控制領域中廣泛使用CAN總線網絡。隨著電子、半導體、通訊等行業的快速發展,為了提高汽車的安全性和舒適性,實現工業控制領域的智能化,以及增強網絡連接與安全等問題,使得CAN總線的負載急劇增大。這時候CAN總線1Mbps的最高傳輸速率就顯得捉襟見肘。
2022-10-25 11:16:533473 在ISO 11898-2和ISO 11898-3中分別規定了兩種CAN總線結構(在BOSCH CAN2.0規范中,并沒有關于總線拓撲結構的說明):高速CAN總線和低速CAN總線,區別表如下所示。
2023-04-07 09:30:181836 
我們根據can總線具有的一些特性可知:CAN總線肯定具有分層結構,而且參考OSI模型(OSI參考模型介紹)是肯定的,我們可以看一下相關的文檔可知:CAN遵從OSI模型。
2024-01-05 09:40:16322 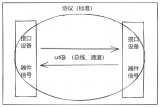
這意味著變送器通過CAN收發器改變總線電平,并將其信息傳輸到CAN總線。接收器通過監測總線電平將總線上的信息讀取到自己的CAN收發器中。
2024-02-19 14:53:54606 
信號譬如視頻、雷達等等也開始使用以太網來進行傳輸。隱隱有取代CAN總線成為汽車總線的趨勢,然而事實真的是這樣嗎?
2018-02-26 09:32:3021367 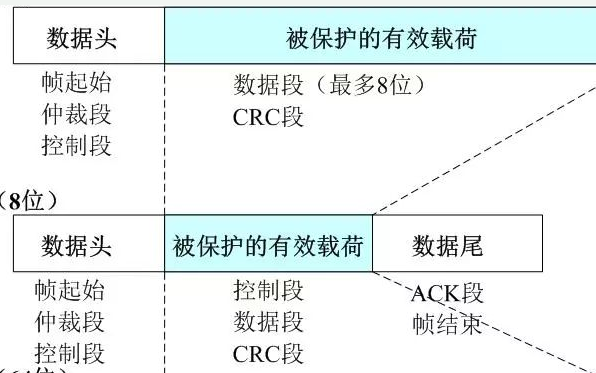
層完成數據打包/解包、幀編碼、媒體訪問管理、錯誤檢測、錯誤信令、應答、串并轉換等功能。這些功能都是圍繞信息幀傳送過程展開的。3 CAN總線的報文傳輸和結構報文類型 在CAN2.0B的版本協議中有兩種
2014-04-27 15:16:02
到車輛的運行情況,做出及時的措施。廣州致遠電子股份有限公司繼研發成功 CANREC—— 8 通道 CAN 總線報文波形記錄分析儀之后。又推出了一系列帶無線數據傳輸的 CAN 總線記錄儀,不但可以離線 CAN 記錄儀進行報文記錄,還可以進行 GPRS、3G等遠程傳輸。如圖 1 所示。
2022-10-17 07:33:01
CAN報文接收時MASK的值為0時 不管ID是多少 都接收MASK為1時看發送節點ID與驗收碼是否一致同一位上同是0或者同是1則接收,否則不接收對嗎????
2013-01-02 20:04:53
在了解 CAN 總線協議以前,需要介紹有關協議中的基本概念。1.報文(Messages)在 CAN 總線傳輸的數據具有固定的格式和有限的長度,稱為報文。2.發送器(Transmitter)和接收器
2018-12-14 14:37:44
)子層完成數據打包/解包、幀編碼、媒體訪問管理、錯誤檢測、錯誤信令、應答、串并轉換等功能。這些功能都是圍繞信息幀傳送過程展開的。3 CAN總線的報文傳輸和結構報文類型 在CAN2.0B的版本協議中有
2014-04-18 16:36:30
1.CAN的ISO[125k-1Mbps]/OSI[125bps-]參考模型的層次結構分為物理層和數據鏈路層。2.CAN報文幀格包含11位標識符的標準幀和29位標識符的擴展幀。3.微控制器
2022-01-11 06:50:05
控制器均支持CAN2.0B協議,即支持29位標識符的擴展格式報文結構。 九、CAN的報文格式: (關于這部分內容,對于我下一步要進行編程實驗控制CAN總線是很重要的一個知識點。很郁悶的是搜了老半天只看見有
2017-10-19 11:12:46
CAN2.0A給出了CAN報文的標準格式,CAN2.0B給出了標準格式和擴展格式兩種。CAN總線最高傳輸速率可達1Mbps(通信距離最長40m),如果降低傳輸速率,其直接通信的最遠距離可達10km(速率
2021-05-13 06:00:00
采用了多主競爭式總線結構,具有多主站運行和分散仲裁的串行總線以及廣播通信的特點。CAN總線上任意節點可在任意時刻主動地向網絡上其它節點發送信息而不分主次,因此可在各節點之間實現自由通信。CAN總線協議
2015-11-05 17:17:31
IICSPICAN485USB工業以太網EtherCATEtherCAT傳輸性能EtherCAT應用層協議層CoE協議現場總線最近的實驗需要較高的運動控制速率。市場上大部分的驅動板目前只支持CAN通信。畢竟CAN通信配置簡單
2021-08-06 07:44:19
產品的開發,CAN總線的穩定性是毋庸置疑的。CAN總線物理結構與特性CAN總線網絡CAN總線網絡主要掛在CAN_H和CAN_L,各個節點...
2021-07-27 07:40:12
輸出高電平,總線才能呈現為高電平(稱為“隱性”)。可見,只要有一個設備電平顯性,那么他就可以覆蓋其他所有設備的電平隱性。CAN控制器在發送報文的同時會監聽總線狀態與自己發送的電平是否一致,如果不一致發生
2022-01-19 06:57:59
CAN總線的發送基本概念報文的作用報文的格式CAN.C代碼//CAN發送一組數據(固定格式:ID為0X12,標準幀,數據幀)//msg:數據指針,最大為8個字節,len:數據長度(最大為8
2021-08-19 08:17:55
產品的開發,CAN總線的穩定性是毋庸置疑的。CAN總線物理結構與特性CAN總線網絡CAN總線網絡主要掛在CAN_H和CAN_L,各個節點通過這兩條線實現信號的串行差分傳輸,為了避免信號的反射...
2021-07-27 06:18:35
控制進入CAN總線,并且每條消息都標記了優先權。另外CAN標準還定義了一系列的錯誤處理機制。CAN報文的四種消息類型:? 數據幀:數據幀將數據從發送器傳輸到接收器。? 遠程幀:總線單元發出遠程幀,請求
2018-09-21 20:32:41
屬于現場總線的范疇,它是一種有效支持分布式控制或實時控制的串行通信網絡。在這個網絡中的各種硬件設備之間不可避免的需要實現數據傳輸,以實現產品的功用。適應技術具體要求,CAN總線透明傳輸通訊模塊誕生
2011-09-24 11:57:56
參照 ISO/OSI 標準模型,CAN 總線的通信參考模型如圖 9-1 所示。這 4 層結構的功能如下:? 物理層規定了節點的全部電氣特性,在一個網絡里,要實現不同節點間的數據傳輸,所有節點的物理層
2018-12-14 14:17:02
,PGN61444 包含了SPN190 發動機轉速和SPN513 發動機扭矩等參數。多幀報文:CAN2.0B 規范定義只能使用單幀報文傳輸,J1939 協議除單幀報文傳輸外,還使用對話式、廣播式多幀報文傳輸
2019-04-08 09:42:13
本帖最后由 于圭 于 2015-1-23 16:33 編輯
我用labview通過CAN總線發數據,單片機發過來的數據有3個不同的報文ID,我要怎么正確的把這3個報文里面的數據讀取出來,求大神指教!!
2014-12-31 14:46:41
協議中CAN報文種類報文傳輸過程中有:數據幀、遠程幀、錯誤幀、過載幀和幀間隔。3. CAN報文的組成通常接收到的CAN報文由很多部分(圖1)組成,解析報文時用到的主要是幀ID和數據兩部分。3.1 幀ID的組成接收到的十六進制的ID實際上是由 29 位標識符轉換而來,目前大多數的通信協議中都直接給出
2021-09-14 09:23:24
問大家一個問題哈,對于一個主板,多個從板的系統,如何實現CAN報文的濾波,以實現對應從板接收對應的報文。
2017-02-08 09:27:41
我用labview通過CAN總線發數據,控制器發過來的數據有3個不同的報文ID,我要怎么正確的把這3個報文里面的數據讀取出來,求大神指教!!多謝多謝
2021-07-23 11:02:50
CAN總線中報文數據讀取方法motorola編碼格式的CAN報文解析需要知道DBC的哪些信息排序方式讀取方式發送方式注motorola編碼格式的CAN報文解析知道CAN報文的DBC,即可按以下
2022-01-12 07:28:16
CAN 總線的報文傳輸是通過 4 種不同類型的幀(Frame)來表示和控制的:? 數據幀(Data Frame) 用來在數據傳輸過程中攜帶數據。? 遠程幀(Remoter Frame) 接收器發送
2018-12-17 10:59:18
一、MODBUS簡介①Modbus協議是一種請求/應答的串行通信協議,是一種工業現場總線協議標準。是一項應用層報文傳輸協議,用于在通過不同類型的總線或網絡連接的設備之間的客戶機/服務器通信。②Modbus協議是一項應用層報文傳輸協議,包括ASCII、RTU、TCP三種報文類型。③標準的Modbus...
2021-08-03 06:50:22
`源模塊一直處于發送狀態,這時開發板去接收報文會出現錯誤,如圖所示:左圖是用CAN盒持續發送報文,有圖是CAN接收結構體的值,可以看出結構體中的值除了ID正確,其他都錯誤。但是我先讓開發板進入等待接收狀態,再讓CAN盒發送報文,就完全正確。如圖:請問這是哪方面的問題呢?`
2018-06-14 15:31:59
rs485與can總線的區別,CAN總線特點:1、國際標準的工業級現場總線,傳輸可靠,實時性高;2、傳輸距離遠(最遠10Km),傳輸速率快(最高1MHz bps);3、單條總線最多可接110個節點
2021-07-19 06:07:04
的應用。2.CAN協議CAN總線采用分層結構,規范規定了任意兩個節點之間的兼容性。包括電氣特件利數據解釋協議。CAN協議可分為:目標層、傳送層、物理層。其中目標層和傳送層包括了ISO/OSI定義的數據鏈路的所有
2016-11-06 17:00:51
進行了說明,圖 1 描述了 CAN 協議中數據鏈路層和物理層與 OSI模型的關系。圖1 CAN分層結構與OSI模型對比1.2 CAN-FD優勢分析CAN-FD相比傳統CAN總線,其優勢主要有以下3點。(1
2023-02-14 14:22:23
;根據CAN總線的特點和實驗數據,分析了CAN總線在光纖介質下傳輸性能的改善。1 CAN總線的雙絞線及光纖傳輸1.1 CAN總線雙絞線傳輸CAN總線典型的網絡拓撲是總線結構。1993年頒布的同際標準
2018-12-04 10:41:09
在 5kbit/s 以下)。? CAN 總線上的節點信息分成不同的優先級,可以滿足不同級別的實時要求,高優先級的數據可以在 134μs 內得到傳輸。? CAN 總線通過報文濾波即可實現點對點、一點
2018-12-13 14:26:31
結合起來。例如,在將出現頻度很高的報文從高速CAN總線傳輸到低速 CAN總線時,將網關和FIFO功能結合起來,就有可能在不增加CPU負荷的前提下實現這種報文傳輸。圖2:利用網關功能自主傳送CAN報文,毋須
2018-12-07 10:09:17
以下;而通信速率最高可達1 Mbps,此時通信距離長為40 m。同時CAN總線的通信媒介采用雙絞線或光纖,選擇靈活,其結構較簡單,總線接口芯片支持8位、16位的CPU。 由于CAN總線采用短幀結構
2018-11-13 10:38:08
需求的前提下精度盡量粗,范圍盡量小,減少信號傳輸所占用的位數。? 優化網絡拓撲結構根據總線電氣負載環境限制,CAN總線節點目前可達 110 個,但是搭載的節點越多,意味著傳輸的報文越多,總線擁堵的概率
2019-12-19 15:09:07
,線纜特性阻抗為120歐姆。 圖7-1:CAN總線網絡拓撲結構圖 8、終端匹配終端匹配電阻大小等于傳輸電纜特性阻抗,傳輸電纜特性阻抗由電纜供應商提供,一般近似為Z=√(L/C)。其中L為電纜單位長度
2021-03-23 08:30:00
,在這個速率下,傳輸距離最長40米(掛接30個節點,CAN信號不隔離)。推薦節點分支長度最大為0.3米、推薦使用帶屏蔽或不帶屏蔽的雙絞線,線纜特性阻抗為120歐姆。 圖7-1:CAN總線網絡拓撲結構圖8
2021-03-08 10:04:15
能不能在接收CAN報文的時候沒有過濾器?我想創建一個網關并將所有消息從一個 CAN 總線傳輸到另一個 CAN 總線。我是否只需要將 1000 條消息添加到我的允許消息列表中以確保所有消息都被接受?
2022-12-12 08:08:59
在VXI總線系統中,為了能夠獲得大量實時數據,需要利用CAN總線快速可靠的傳輸數據的性能,設計一種混合VXI總線和CAN總線的系統。在這種混合系統中要實現CAN總線上各個節點采集
2009-07-06 16:27:58 13
13 本文針對煤礦安全監控系統的特點以及目前傳輸系統存在的問題,提出了用CAN 總線構建煤礦安全監控系統傳輸網絡的思想,并實際完成了基于CAN 總線的煤礦安全監控系統傳輸網絡的
2009-08-28 11:29:0115 本文首先簡要介紹了CAN 總線的技術特點,同時把針對電動汽車的特點,建立車身網絡的拓撲結構。詳細的介紹了CAN 通訊協議準的拓撲結,制定了CAN 總線應用層協議的通訊報文形式
2010-01-07 14:47:0660 本文是設計了基于光纖CAN總線的分層分布式監控系統。該系統分調度層、站控層和間隔層。根據其輸入輸出的數字量和模擬量來界定鏈式STATCOM系統的各種狀態并對各工作狀態進行嚴密、
2012-02-14 16:44:0944 目前PCI是處于主流的計算機總線。以往的CAN卡一般都是基于ISA總線的,由于ISA總線傳輸速率低,CAN卡必須增加中繼控制功能,才能夠適應CAN的高速傳輸,導致造價高、體積大、傳輸速率
2012-06-01 10:57:432053 
通過對分布式C4ISR系統通信報文傳輸標準仿真驗證系統的功能、組成、仿真模型與仿真系統流程的研究,提出了分布式C4ISR系統通信報文傳輸標準仿真驗證系統的設計方案。系統可用于對新提出的C4ISR系統通信報文傳輸標準進行正確性驗證與可行性分析,同時可為新標準實施后的實裝貫標改造工作提供技術支撐。
2016-01-04 09:39:067 對于一般的CAN總線網絡,其網絡結構圖可以化簡圖、CAN總線網絡拓撲結構圖。
2016-05-03 16:42:4548 [第13講] CAN總線(124分鐘),由何強主講.本課主要講解:(1).典型CAN總線網絡系統結構詳解;(2).CAN總線的報文傳輸和結構講解;(3).CAN總線特點講解;(4).STM32中的CAN控制器;(5).CAN控制器的寄存器詳解;(6).CAN控制器的庫函數詳解.
2016-10-09 16:14:191644 CAN-bus總線是應用最廣泛的現場總線之一,而很多非常熟練的CAN工程師,面對一條CAN報文到底有多少位的問題時,卻不能非常準確地回答。今天我們就從最基本的幀格式來解惑一條CAN報文的到底有多少位。
2017-06-06 16:36:2932775 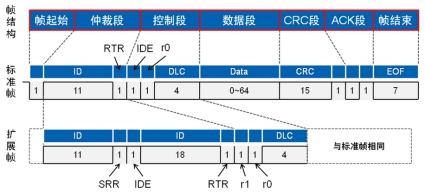
控制器局域網總線(CAN,Controller Area Network)是一種用于實時應用的串行通訊協議總線,它可以使用雙絞線來傳輸信號,是世界上應用最廣泛的現場總線之一。CAN協議用于汽車中各種
2017-11-09 19:33:5230784 
結構: 表1 CAN報文結構 二、仲裁原理 CAN總線的仲裁是基于線與原理,如圖1所示。當個收發器同時發
2017-11-12 10:52:428 當CAN總線上的一個節點(站)發送數據時,它以報文形式廣播給網絡中所有節點。對每個節點來說,無論數據是否是發給自己的,都對其進行接收。每組報文開頭的n位字符為標識符(擴展幀格式為29位),定義了報文
2017-11-21 16:39:470 為了擴展VME總線和CAN總線的應用范圍,充分利用兩種總線的不同傳輸特點,采用了模塊設計方法,提出一種基于FPGA和MCU的總線轉換方案。該方案給出了FPGA與上位VME總線部分的VME總線接口
2018-07-17 10:11:003239 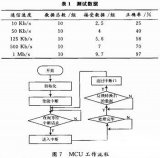
CAN總線原理 CAN總線使用串行數據傳輸方式,可以1Mb/s的速率在40m的雙絞線上運行,也可以使用光纜連接,而且在這種總線上總線協議支持多主控制器。CAN與I2C總線的許多細節很類似,但也有一些
2017-12-07 10:25:5426 基于保證CAN總線網絡傳輸數據時可靠性的目的,采用了從包內數據的可靠性、數據包的可靠性傳輸兩方面進行驗證的方法,通過多次對比使用文章設計的算法、不使用文章設計的算法時CAN總線網絡傳輸數據的準確率
2017-12-21 16:19:060 CAN總線規范采用了ISO-OSI(Open System Interconnection Reference Model,開放式通信系統互聯參考模型)的三層網絡結構,有三種不同的器件與之相對應。
2018-03-13 14:09:1914593 用來實現CAN總線協議。本文主要對CAN總線通信報文驗收濾波、位定時與同步做了詳細介紹,具體的跟隨小編一起來了解一下。
2018-05-07 16:16:129726 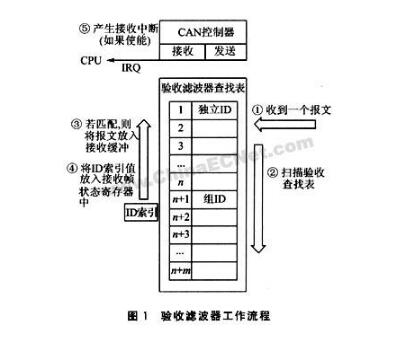
使用CANScope測量CAN總線信號,在干擾很嚴重的情況下會出現CAN總線波形解碼與CAN報文解碼不一致的情況,具體表現為某些正確報文對應的波形解碼卻是錯誤的,或者收到的錯誤報文對應的波形解碼卻是正確的,如圖1中,幀ID為0x721的正確報文對應的波形解碼卻為CRC錯誤。
2019-12-06 07:57:004399 
CAN總線的通信距離最遠可達10km,通信速率5Kbps以下。通信速率最高可達1Mbps,但是此時通信距離在40m以下。傳輸距離和速率成反比,還有線材要求也比較高。
2018-11-27 17:00:4733870 CAN總線用戶接口簡單,編程方便。網絡拓撲結構采用總線式結構。這種網絡結構簡單、成本低,并且采用無源抽頭連接,系統可靠性高。通過CAN總線連接各個網絡節點,形成多主機控制器局域網(CAN)。信息的傳輸采用CAN通信協議,通過CAN控制器來完成。
2018-11-28 17:16:0317438 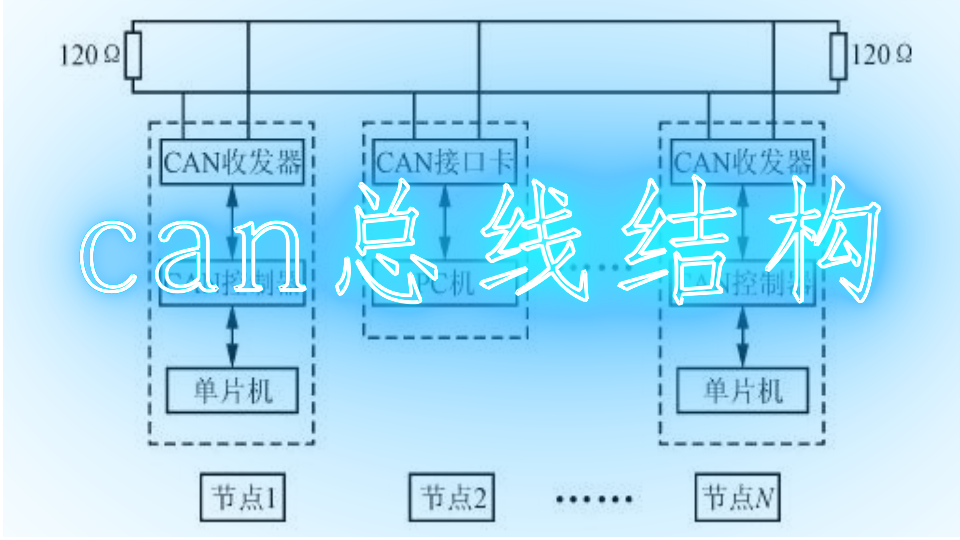
CAN總線通訊是我們每天都會使用的工業通訊總線,工程師更多的是關注報文是否能夠正常接收,解析結果是否正確。卻忽略了CAN總線的報文是怎么產生以及收發的,所以遇到通訊異常的問題時就會無從下手。那么這篇文章將會帶您快速了解報文的傳輸原理。
2019-04-25 14:50:5419046 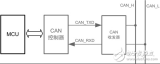
報文處理部分通過CAN收發器將總線上的CANH和CANL差分信號轉成單端的數字信號RXD,再使用專用的CAN控制器接收RXD信號并進行CAN協議解碼,最后將解碼后的報文進行接收存儲;波形處理部分通過
2019-11-11 09:55:072678 
CAN協議教程 介紹:CAN總線 CAN總線是廣播類型的總線。這意味著所有節點都可以偵聽到所有傳輸的報文。無法將報文單獨發送給指定節點;所有節點都將始終捕獲所有報文。但是,CAN硬件能夠提供本地過濾
2020-04-03 15:32:2213499 為獲得安全的數據發送,CAN總線采取錯誤檢測和處理的措施,在報文傳輸過程中設有位錯誤、填充錯誤、CRC錯誤、格式錯誤和應答錯誤5種錯誤類型,對于故障的界定有“錯誤激活”、“錯誤認可”和“總線關閉”3種狀態。
2020-04-04 10:44:00969 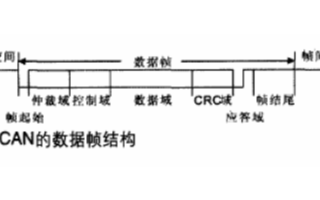
CAN總線的物理層是將ECU(Electronic Control Unit-電子控制單元,又稱“行車電腦”、“車載電腦”等)連接至總線的驅動電路。ECU的總數將受限于總線上的電氣負荷。物理層定義
2020-08-14 11:29:137853 數據幀由7個不同的位場組成:幀起始、仲裁場、控制場、數據場、CRC場、應答場、幀結束。其中,數據場的長度為0~8個字節。標識符位于仲裁場中,報文接收節點通過標識符進行報文濾波。
2020-11-02 10:46:4910656 都用CAN總線的話,那整車的總線架構成本將會變得很高!在一些比如車身電子配件的地方(如車窗、后視鏡、大燈、車鎖等),我們不需要報文像CAN總線上傳輸的那樣高速!各大廠商一拍腦門就研究了這個LIN總線! 本文關注點:有了CAN為什么還會有LIN,CAN和LIN的區
2020-12-06 09:37:007998 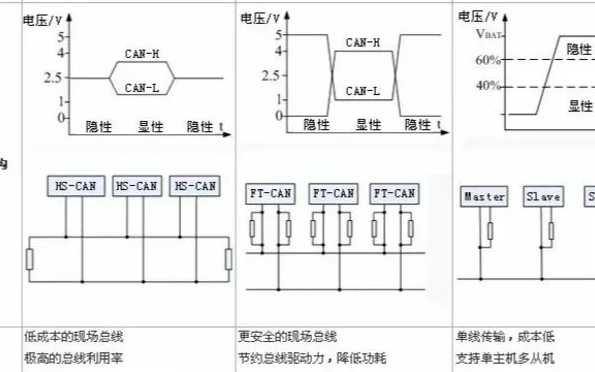
CAN總線的報文是怎么產生以及收發的,遇到通訊異常的問題時從什么角度分析?這篇文章將會帶您快速了解報文的傳輸原理。
2020-12-26 02:46:471412 在分析CAN總線雙絞線和光纖傳輸特點的基礎上,提出一種基于光纖收發一體模塊及CAN總線控制器SJAl000的光纖傳輸接口設計方案;詳細介紹光纖收發器的選取及傳輸接口的實現;根據光纖收發一體模塊
2021-04-20 10:24:3733 CAN是一種用于實時應用的串行通訊協議總線,CAN能夠使用雙絞線來傳輸信號,是國際上應用最廣泛的現場總線之一。 can總線工作原理 CAN總線的傳輸方式是串行數據傳輸,能夠在1Mb/s的速率40m
2021-08-07 17:07:4333792 【科普】CAN總線介紹及FPGA實現方案簡介 這里我們先逆推一下CAN總線的一些特點。 第一,CAN總線分層結構 我們根據can總線具有的一些特性可知:CAN總線肯定具有分層結構,而且參考OSI模型
2021-11-18 16:35:555375 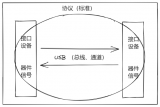
CAN總線上傳輸的信息稱為報文,當總線空閑時任何連接的單元都可以開始發送新的報文。
2022-10-10 14:58:296934 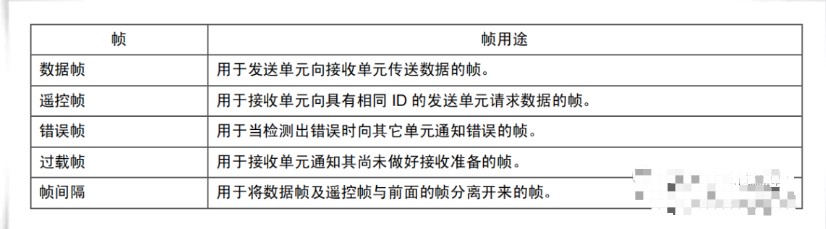
電子發燒友網站提供《CAN總線報文記錄產品簡介.pdf》資料免費下載
2022-10-14 14:50:311 CAN總線上傳輸的信息稱為報文,當總線空閑時任何連接的單元都可以開始發送新的報文。
2022-10-17 15:09:493134 每個CAN報文只有8字節,當節點需要發送較大的數據報文時很容易受限,所以要傳輸大于8字節數據時,就要進行分包傳輸。
2022-10-25 11:18:172800 在CAN總線通信的應用領域中,很多客戶需要將CANID 放在CAN報文中,這樣更方便接入不同的設備,有利于用戶通過模塊更方便的組建自己的網絡,使用自定的應用協議。但是要實現這樣的應用,用戶往往需要
2023-05-12 10:40:32539 
CAN芯片將數據根據協議組織成一定的報文格式發出,這時網上的其它站處于接收狀態。每個處于接收狀態的站對接收到的報文進行檢測,判斷這些報文是否是發給自己的,以確定是否接收它。
2023-06-16 12:50:401506 
CAN總線是一種常用的總線,對于剛開始接觸CAN總線的,面對著各式各樣的資料,可能不知道從何看起,今天科普一下CAN總線的基礎知識。
2023-06-19 17:20:141160 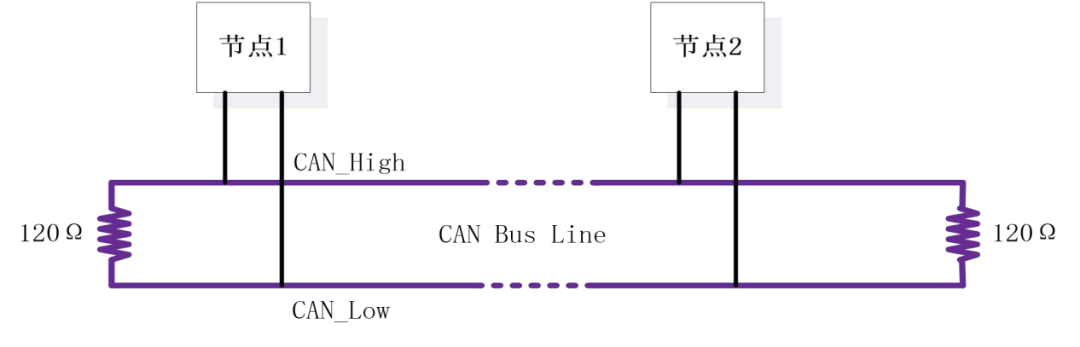
點擊關注,電磁兼容不迷路。什么是CAN總線CAN總線是一種廣泛用于汽車、工業自動化和其他領域的串行通信協議。它允許多個設備共享通信線路,傳輸數據以及控制信號。CAN總線有兩個不同的版本
2023-04-21 09:42:31639 
CAN FD幀結構 CAN FD節點可以正常收、發CAN報文,但CAN節點不能正確收、發CAN FD報文,因為其幀格式不一致。 與CAN一樣,CAN FD一共具有:幀起始,仲裁段,控制段,數據
2023-07-18 10:42:253832 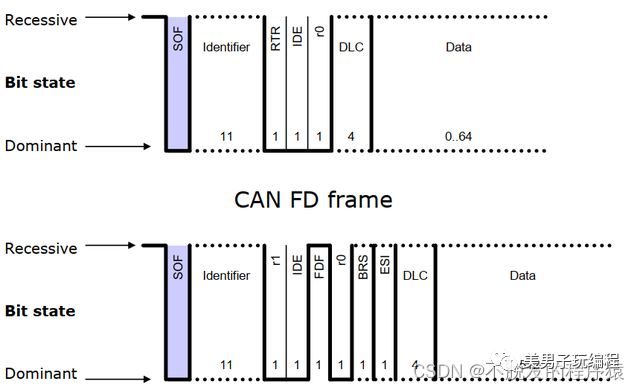
一幀CAN FD報文位數 根據CAN FD幀結構組成,可以算出一幀CAN FD報文位數: CAN FD報文位數 = 幀起始(1位)+ 仲裁段(13/32位)+ 控制段(8位)+ 數據段(0~512
2023-07-18 10:48:184087 CAN總線協議目前廣泛應用于汽車中各種不同控制器之間的通信,CAN總線的物理應用是采用絕緣的雙絞線來進行信號的傳輸,是世界上應用最廣泛的現場總線,CAN總線本身具有強大的抗干擾能力。
2023-08-11 11:10:29922 
在CAN總線領域,我們常會看到人們用不同的詞語描述信息傳輸速率,其中最常見的就是比特率(Bit Rate)和波特率(Baud)。
2023-08-14 15:41:10699 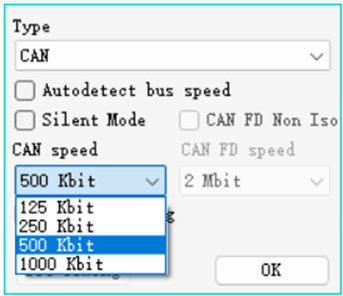
can總線的傳輸速率是多少?? CAN(Controller Area Network)總線是一種控制區域網絡,是一種高速串行通信總線,廣泛應用于汽車、工業、醫療和家庭等領域。CAN總線是一種實時
2023-09-07 15:05:439442 虹科PCAN-DiagFD是一款用于CAN總線通信診斷的手持式診斷工具。可以基于協議層診斷CAN2.0和CANFD報文,也可以利用示波器功能和測量功能實現物理層測試。示波器功能用于CAN總線上的信號
2021-11-10 15:56:327 can總線傳輸距離? CAN總線是一種串行通信協議,常用于汽車行業中的數據通信。它被廣泛應用于車載電子系統,如發動機控制單元、制動系統、儀表盤和空調控制系統等。CAN總線的主要優勢在于其高可靠性
2023-12-07 18:09:401216 CAN總線協議是一種串行通訊協議,主要用于汽車和工業自動化領域,實現了實時應用的需求。 首先,CAN總線協議的基本概念包括報文、信息路由和位速率。在CAN系統中,總線上傳輸的信息以不同格式的報文發送
2024-01-19 17:47:57276 之間的信息傳輸。下面將詳細介紹CAN總線數據幀的格式。 CAN總線數據幀分為兩種類型:標準幀和擴展幀。標準幀用于傳輸標識符長度為11位的數據,而擴展幀用于傳輸標識符長度為29位的數據。 1. 數據幀的結構 標準幀和擴展幀的數據幀結構相似,都包
2024-01-31 13:46:38314 CAN總線為什么能在1Mbps上傳輸超過50M? CAN總線是一種被廣泛應用于汽車和工業控制領域的串行通信協議。它可以提供高效、可靠和實時的通信,使得復雜的系統能夠實現數據的傳輸和交流。然而,對于
2024-01-31 13:46:49270 高速CAN總線和低速CAN總線的特性 高速CAN總線和低速CAN總線是兩種常見的CAN總線類型。它們在數據傳輸速率、最大電纜長度、適用場景等方面存在一些差異。下面將詳盡、詳實、細致地介紹這兩種CAN
2024-01-31 14:09:01497 can總線與485總線五大區別? CAN總線和485總線是現代工業自動化領域中常見的兩種通信總線,它們都具有一定的優勢和特點。 一、傳輸距離 CAN總線和485總線在傳輸距離上有著明顯的差異。CAN
2024-02-03 09:22:391583
 電子發燒友App
電子發燒友App





















 工商網監
工商網監
評論