 電子發燒友App
電子發燒友App


根據資料來看步進電機的原型早在1870年左右就出現了,在20世紀60年代永磁體制造技術進步后得到快速發展,現在已是一種基本的電機類型。步進電機是一種將電脈沖信號轉換成相應的角位移或線位移的控制電動機。對于許多初學電子的年輕朋友來說,步進電機還是十分的陌生。它無法像上期我們介紹的直流電機只要接通電源后就能正常工作,它是一種感應電機,需要驅動電路將直流電變成分時供電的多相時序控制電流,來按一定時序向步進電機各個繞組供電,簡單來說使用步進電機的最小系統必須有脈沖信號發生器、功率驅動電路才可以使其正常工作。因此要用好步進電機必須有電機、電子、微機等知識。雖然步進電機在使用上相對復雜,但在各種需要精確控制的領域都被廣泛使用,原因如下:在非超載的情況下,步進電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響,在步進驅動電路的控制下,每一個脈沖信號只會讓電機按步距角轉動一個固定的角度,它的旋轉是以固定的角度一步一步運行的,只需要控制控制脈沖個數就可以控制其電機軸的角位移量,同時可以通過控制脈沖頻率來控制電機轉動的速度和加速度,從而達到精確定位和調速的目的。那么步進電機又是如何做到這些的呢?請向下看。
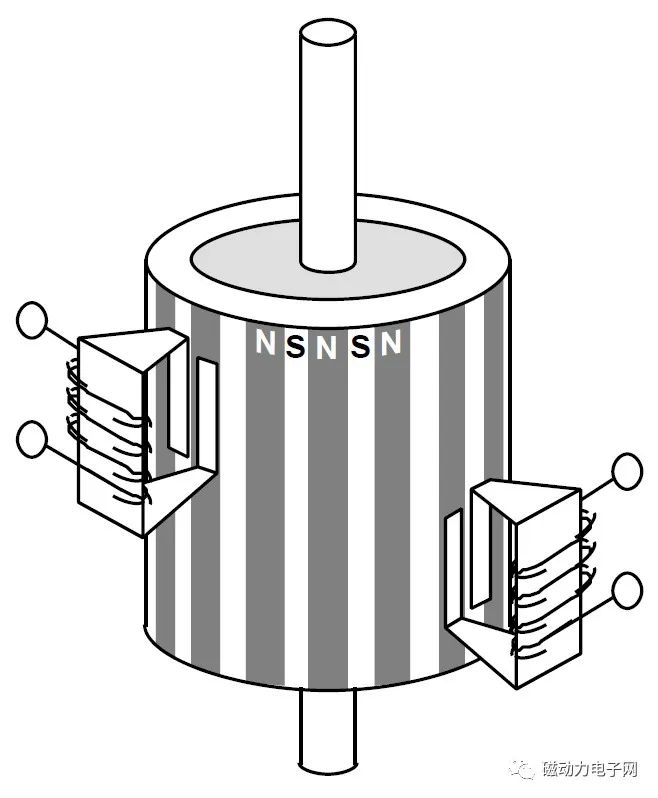
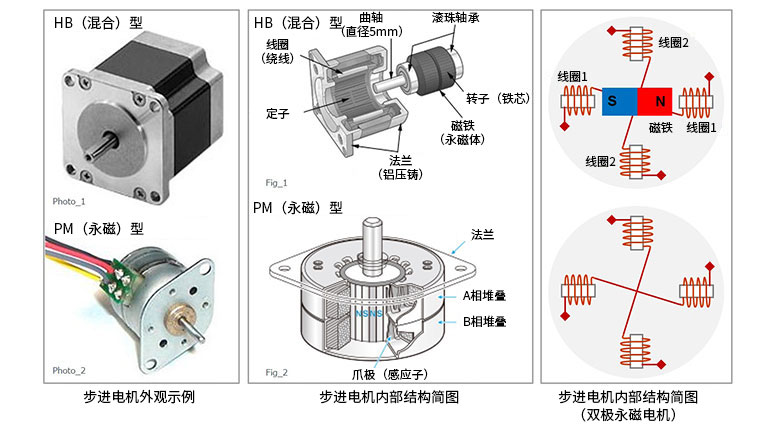
步進電機可以分成 反應式 (可變磁阻式VR), 永磁式 (PM)以及 混合式 (HB)三種。現在最常見的是混合式步進電機,它是匯集了可變磁阻步進電機和永磁體步進電機二種步進電機的優點。這三種種類的步進電機結構原理圖分別是圖一至圖三。
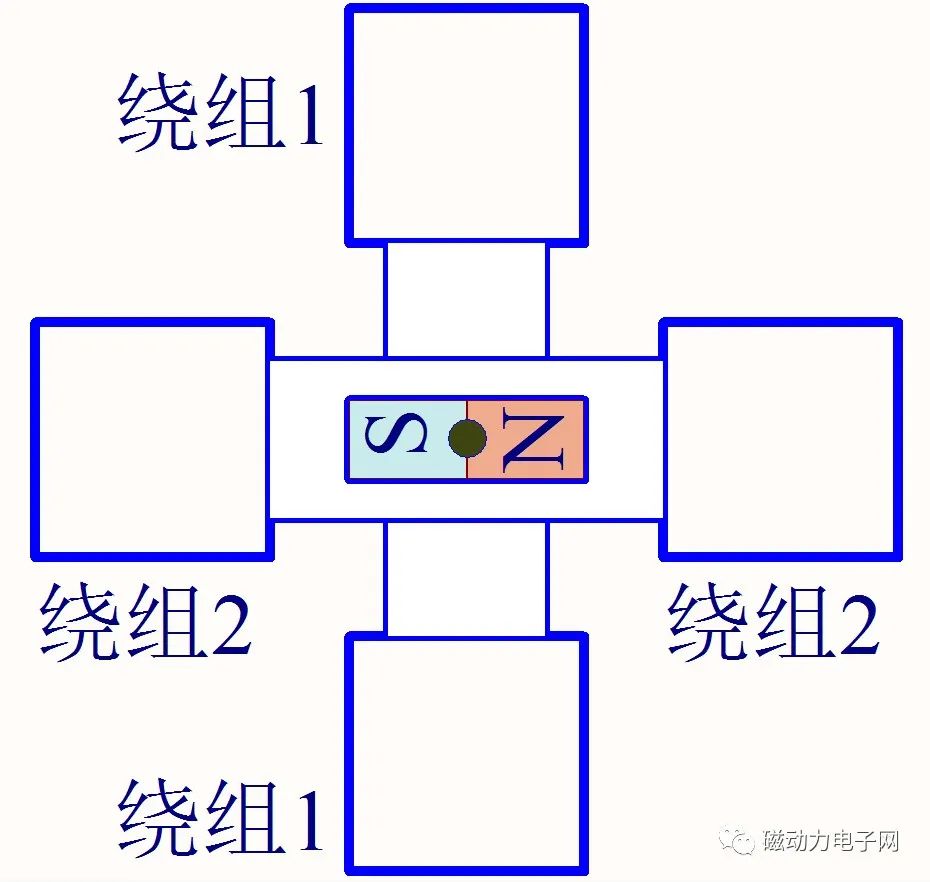
圖一VR
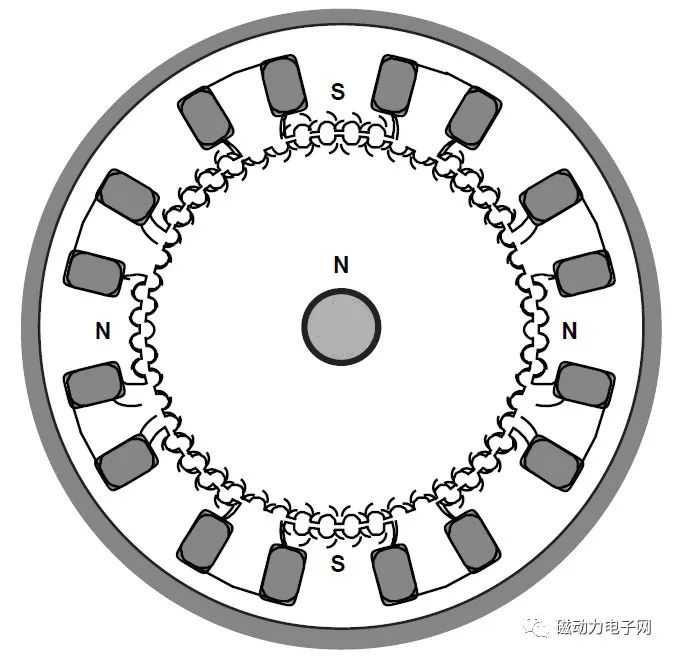
圖二PM
圖三HB
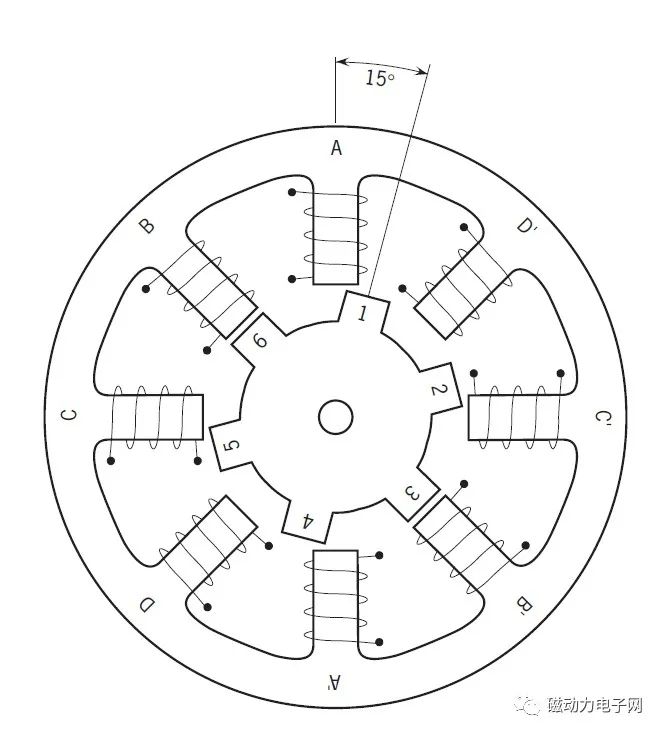
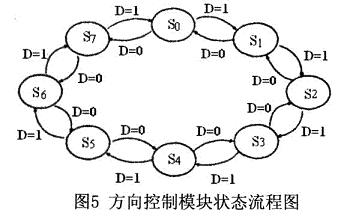
三種種類的步進電機雖然結構上有很大區別,但其基本的工作原理差不多。下面以步距角為90°的步進電機簡單模型來講解工作原理。圖四就是90°步距角的步進電機結構模型,中心的轉子是由永磁體組成,轉子至少由一塊永磁體組成,通常都不止一塊,而圍繞轉子的是定子,是由繞組群組成。這個結構和普通有電刷的直流電機不一樣,直流電機轉子是繞組,定子則是永磁體,當直流電機給繞組(轉子)通電時,通過轉向器作用,轉子會使是電機軸不停轉動,而步進電機給一組繞組通電時,這一繞組產生磁場,轉子受磁場作用會轉到這個繞組的位置上,并保持在這個位置上。使用過步進電機的朋友都什么知道,當步進電機驅動器通電后,步進電機會鎖定,如果你這時想用手去轉動電機軸是很費力的,尺寸大點的步進電機更是沒法轉動,這就是受到上述所說的作用力,這個作用力矩稱之為保持轉矩。步進電機的步距、保持等這些特性使得它在多個領域中有廣泛的應用。如圖五中的自動注射器中的傳動機構、雕刻機的傳動機構、打印機的傳動機構等等傳動電機都是使用了步進電機。
圖四 簡單的步進電機模型
步進電機英文稱為steppingmotor,從字面也可以理解到,這種電機是以‘步’來運轉的,而不像普通直通電機那樣連續順暢的旋轉,要使步進電機連續旋轉必須按‘步’走,一步一步前進。那么怎么能讓步進電機轉子‘步進’起來呢?看過上一篇直流電機文章的讀者知道洛倫茲力,就不難回答這個問題,對的,如圖四中只要把繞組2斷電而繞組1通電就可以把轉子‘步進’到繞組1的位置上。下面我們來用圖說明圖四的90°步距角的步進電機模型順時針旋轉一周的工作過程。首先給繞組1正相加電,讓轉子保持在圖六位置上,然后繞組1斷電,繞組2正相加電,這時轉子會轉到圖七位置上,這時轉子轉了一個步距角正好轉了90°,第三步轉子要圖八的位置上,這時繞組1必須施加反相電流才能產生圖八中的磁場使轉子從第二步位置轉到第三步位置上,同樣第四步中的繞組2也必須施加反相電流。順序重復這些步驟時,電機轉子就可以連續做順時針圓周旋轉,而每一步則正好轉了90°。那么要逆時針旋轉又該如何做呢?很簡單只要把步驟反過來執行可以了,如在執行第三步后,再執行第二步那么轉子會逆時針轉90°回到圖七的位置上。由此可以看出使用步進電機必須也要有換相器,只是它不同于普通直流電機那樣使用簡單的電刷機器式換相器,而是需要能使多個繞組進行分時供電和換相的驅動電路來實現這一功能。驅動控制電路所輸出的時序及頻率則是控制步進電機速度和位置的關鍵。
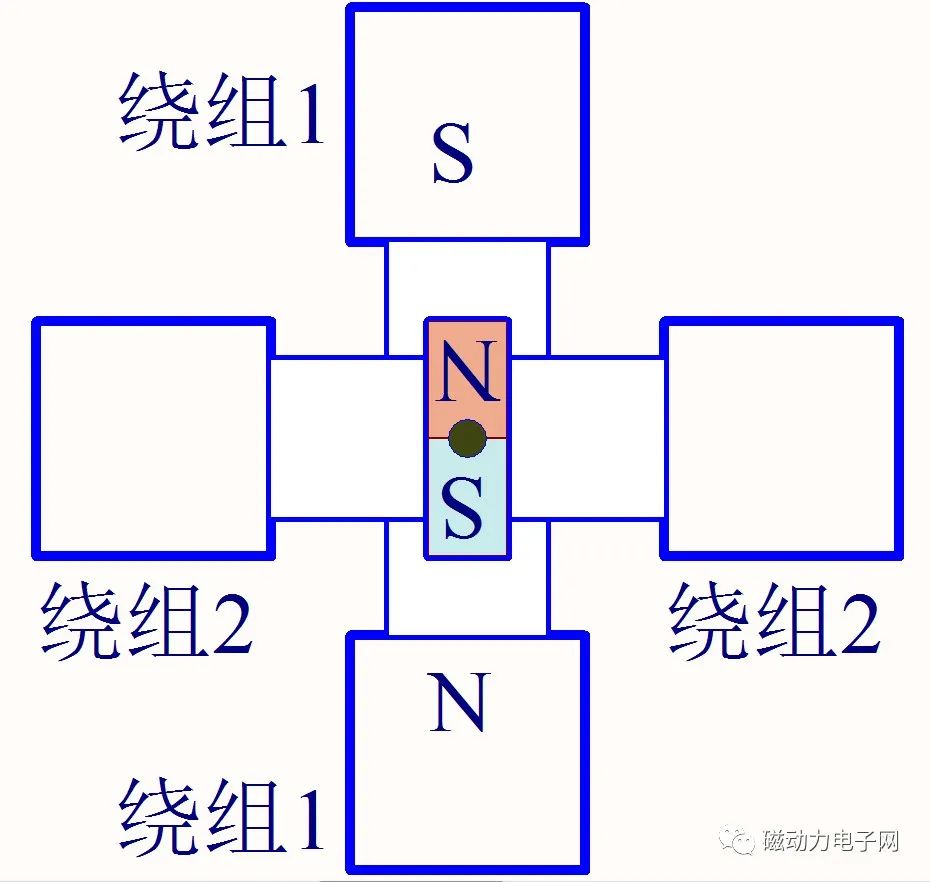
圖六 第一步
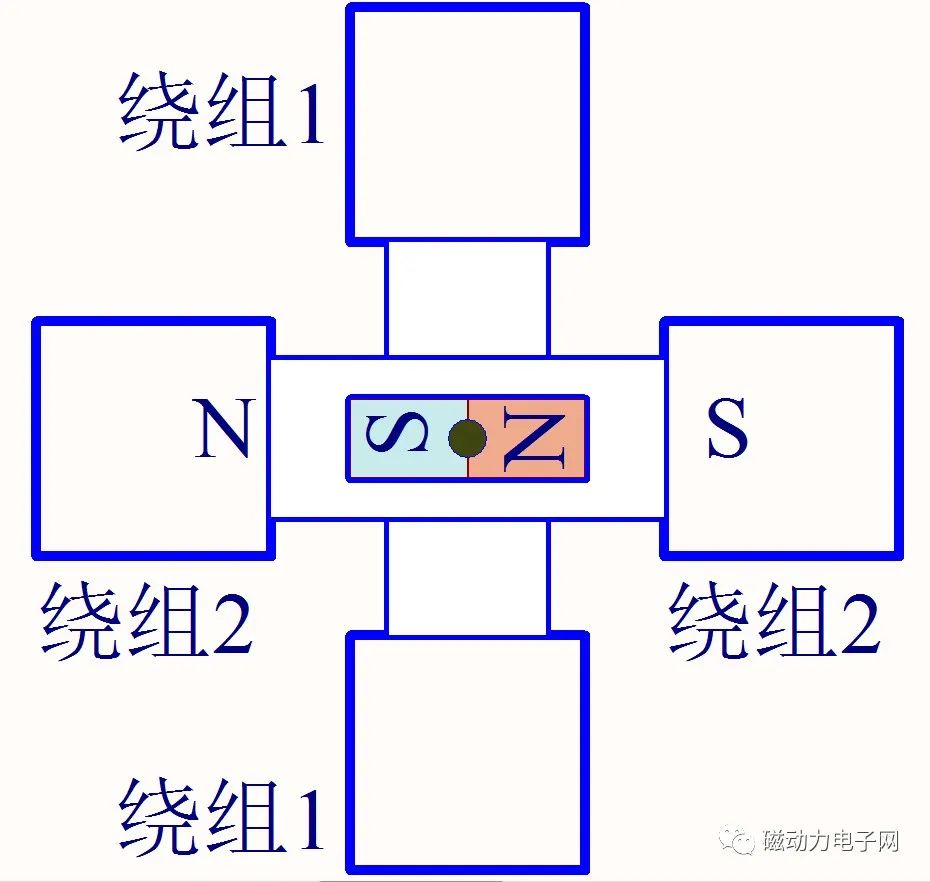
圖七 第二步
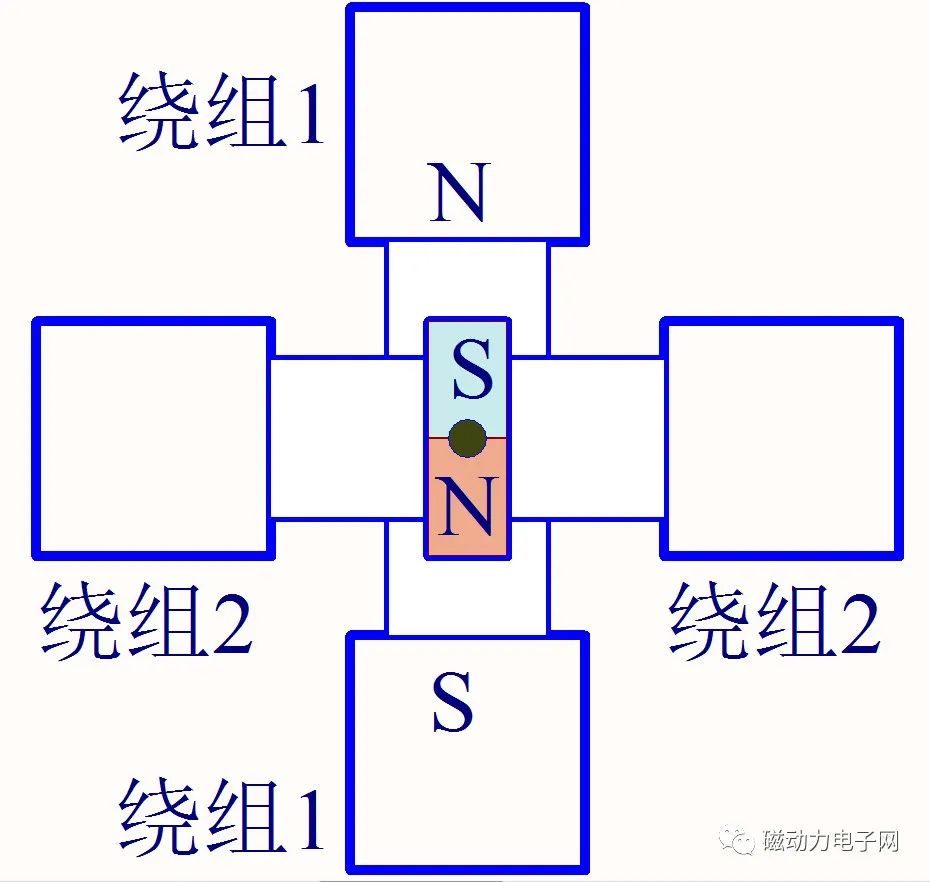
圖八 第三步
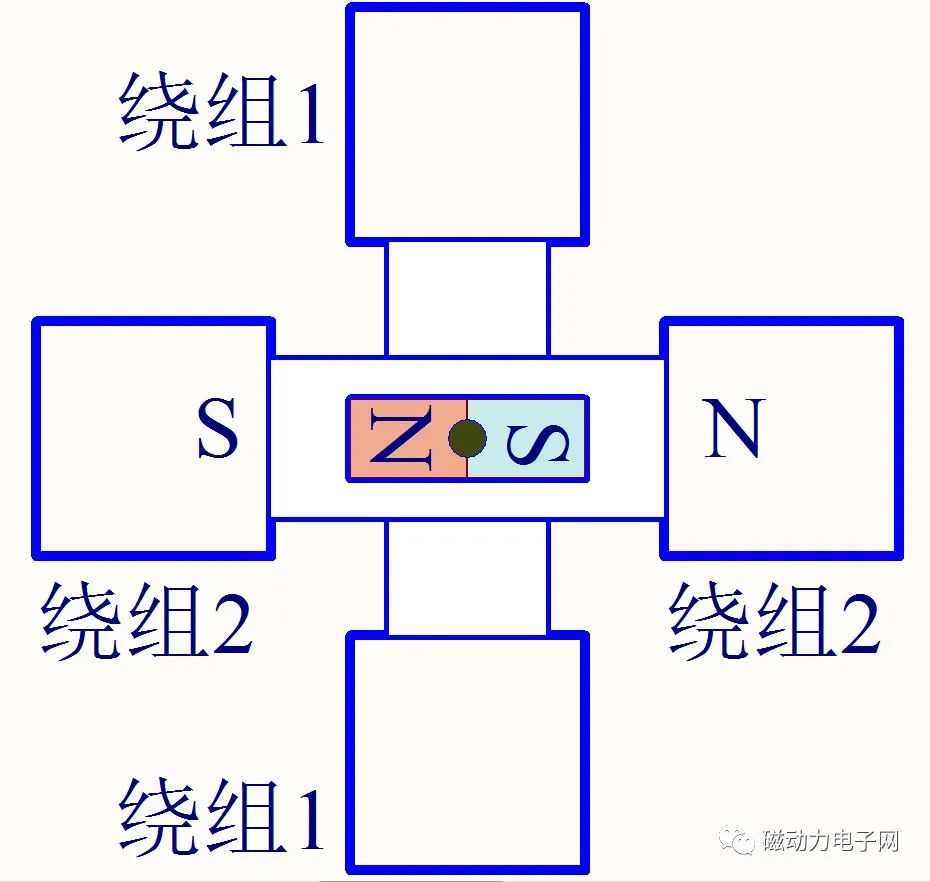
圖九 第四步
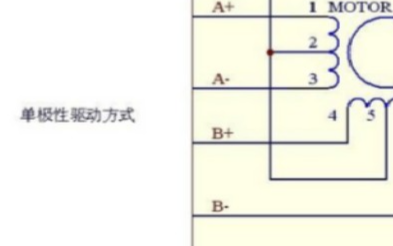
從以上的過程描述我們可以看出步進電機的每一步都會精確的走一個步距角,而不需要額外的一個反饋系統,也就是使用開環系統就能實現精確的定位。普通直流電機不加反饋系統的情況下是不可能實現的,使用步進電機可以在廉價的基礎上得到理想的精度,這也是圖五中那些精密設備要使用步進電機的原因之一。每步90°怎么能算精確呢?當然,那只是我們用來分析的簡單模型,實際上現在常用的混合式步進電機步距角都很小,而常見混合式的步進電機又有單極性、兩相以及五相,單極性步進電機的步距角一般為3.6°或7.2°,兩相步進電機步距角為3.6°或1.8°,五相步進電機則為0.72°或0.36°。有一些高性能的步進電機最小步距角可以到0.036°,但那是極為少見和昂貴的。圖十就是一個五相混合式步進電機的內部結構照片。可以清楚看到十組繞組組成的定子及由圓柱齒輪狀永磁體組成的轉子。圖十一則是這個五相步進電機的外觀圖,而圖十二則是兩相步進電機的外觀,同是混合式其內部結構基本一樣,只是繞組的接線形式不一樣。所以在使用步進電機之前,我們必須先了解步進電機的繞組的線路結構。圖十三是單極性步進電機(又稱4相步進電機)的線圈線路,圖上的引線是5線,還有一種是6級單極性步進電機,不同之外是公共端分為2線引出,每2個線圈一個公共端。這樣的電機通常在打印機、儀表等處可以找到,體積都比較小。圖十四是雙極性步進電機(又稱2相步進電機),其體積和驅動能力都會比單極性的要大許多。圖十五則是五相步進電機的線路結構圖。另外還有三相步進電機由三組繞組組成定子,這里不做具體說明了。另一種比較不常見的步進電機就是通用步進電機,它的每一組繞組的引線分別引出,一般為8線,這種電機可能根據使用者的需要配置為單極性或雙極性等形式使用。
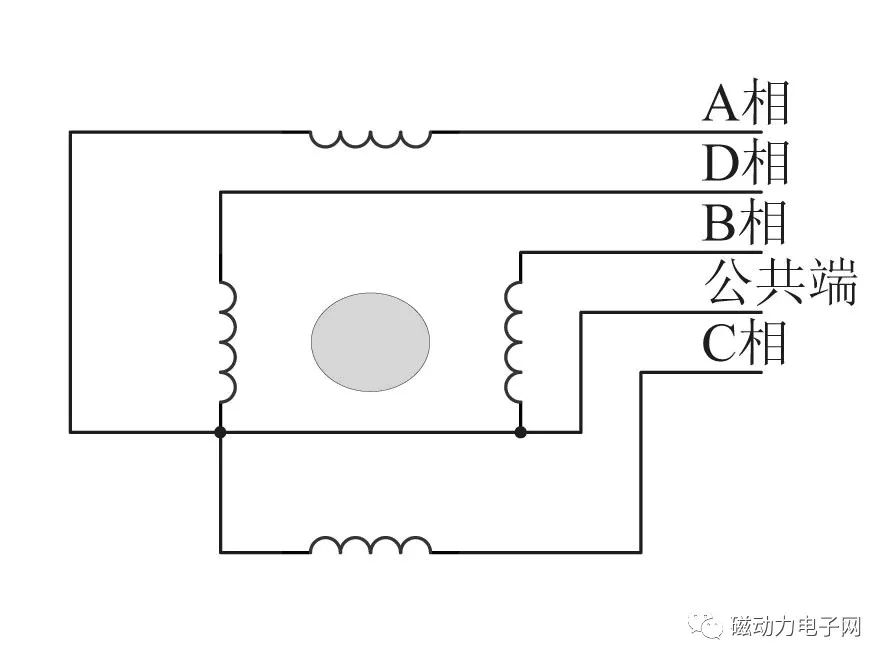
圖十三 單極性
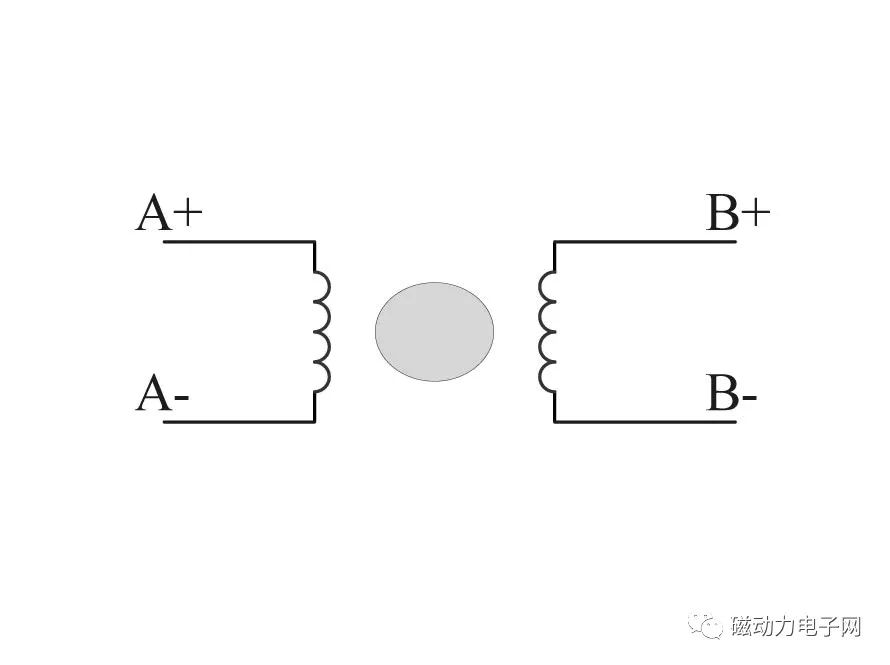
圖十四 雙極性
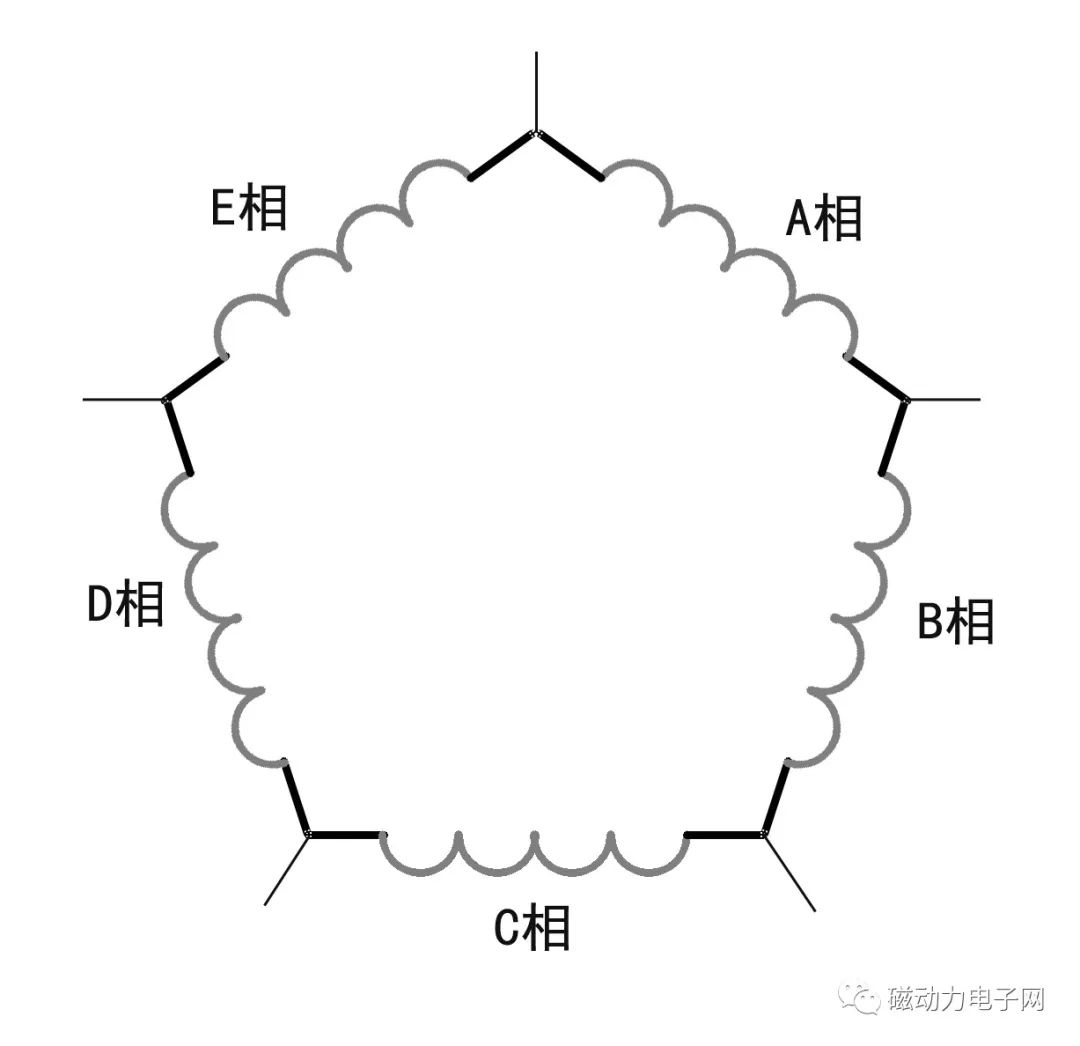
圖十五 五相
知道步進電機的工作原理及結構后,我們就不難知道它工作時需要怎么樣的時序對繞組加電進行驅動了,下面我們來具體看看單極性和雙極性這二種常用的步進電機需要怎么樣去驅動。
購買二手單極性電機電機時,商家通常不會給你資料,甚至在電機上看不到型號,使用時先需要找出引線是屬于那個相的。以上幾個步驟可以幫你很快解決這個問題,這里是以5線單極性步進電機為例,圖十六是試驗時的照片。
1. 因為公共端與其它各引線的電阻是一樣的,所以用萬用表把測量每一根線對其它線的電阻,如果這根對其它線的電阻都一樣,則說明是公共端了。
2. 把公共端連到一個電源的正極,測試時可以用+5V。
3. 用一膠帶粘貼到步進電機的輸出軸上,用于看電機是否轉動。
4. 任意選出一條引線(公共線除外),把此線看做A相的引出線,把它接到電源的負極,這時電機會轉動一下或不轉動。
5. 然后斷開接在A相的負極接線,用其接觸其它的線,如果這時電機順時針轉轉動,說明所接觸的引線是B相的引出線,如果電機逆時針轉動則說明不是B相,這時斷開負極線,用負極線接觸一下A相,使轉子回復到原位。
6. 用第5點的方式找出C、D相,最后用負極線依次接觸ABCD相,轉子能順時針連續轉動時,則說明相序尋找正確。
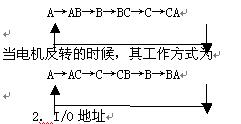
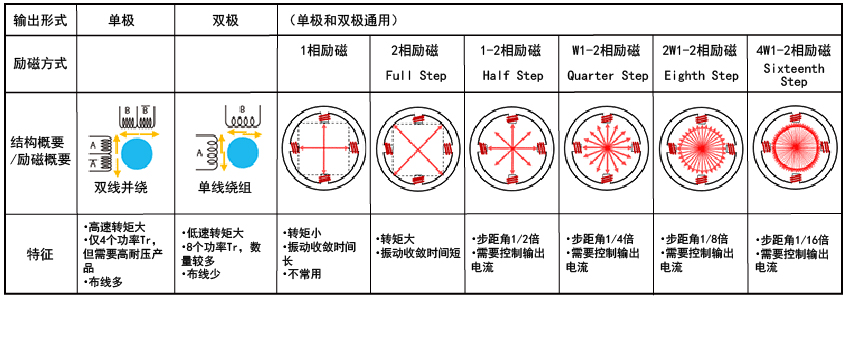
從尋相的過程中,可以發現單極性步進電機只要單一極性的電源對繞組進行加電就可以讓電機運轉,這也是其名稱的由來。通過同時對一組或多組繞組加電,可以得到不同的步進方式。單極性步進電機的步進方式有如下三種,單拍,雙拍,半拍。
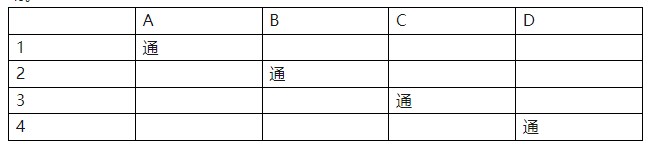
單拍步進方式的驅動時序如表一,單拍的工作原理是每次給一個繞組通電,轉子與通電繞組磁性相反的永磁體會被通電繞組吸引,依次通ABCD相,轉子就會不停的轉動。
雙拍步進方式的驅動時序如表二,雙拍的工作原理,一次同時給兩個繞組通電,轉子會到達兩個繞組的中間位置時平衡,因為同時兩個繞組通電,所以用電量也需要比單拍方式多一倍,但可以多獲得40%左右的輸出力矩。
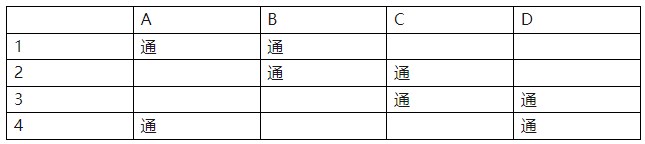
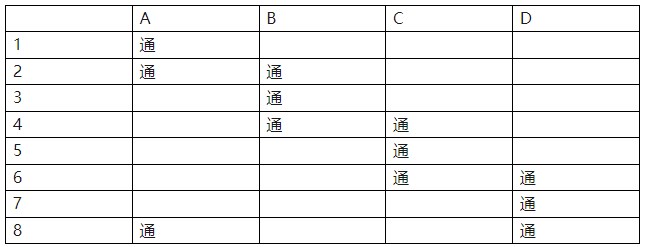
半拍步進方式的驅動時序如表三,半拍方式是讓單個繞組通電與雙個繞組通電交替進行,輸出力矩比單拍大,但又比雙拍小15%-30%。這種方式可以提高一倍步進分辨率,也就是電機轉一周需要雙倍的脈沖數,而每步步距角是單拍或雙拍時的一半。
雙極性,也就是說每個繞組都可以兩個方向通電,對于轉子而言每個繞組就可以是N極和S極。通常也稱之為兩相步進電機,因其具有兩組分離的線圈。同一大小的雙極性和單極性步進電機相比較,雙極性的輸出力矩要比單極性的要大,原因是工作時單極性的只有一個繞組形成磁場,而雙極性則是兩個繞組形成兩個磁極吸引轉子。雙極性步進電機一般有4根引出線,可以使用萬用表方便的查出那2根引線是在一個繞組上的。常見的雙極性步進電機一般步距為1.8°,每200步為一圈,在使用半拍方式驅動時可以是400步轉一圈。也經常見到有6線引出的,多一對中間抽頭,可以有2種接法如圖十七。
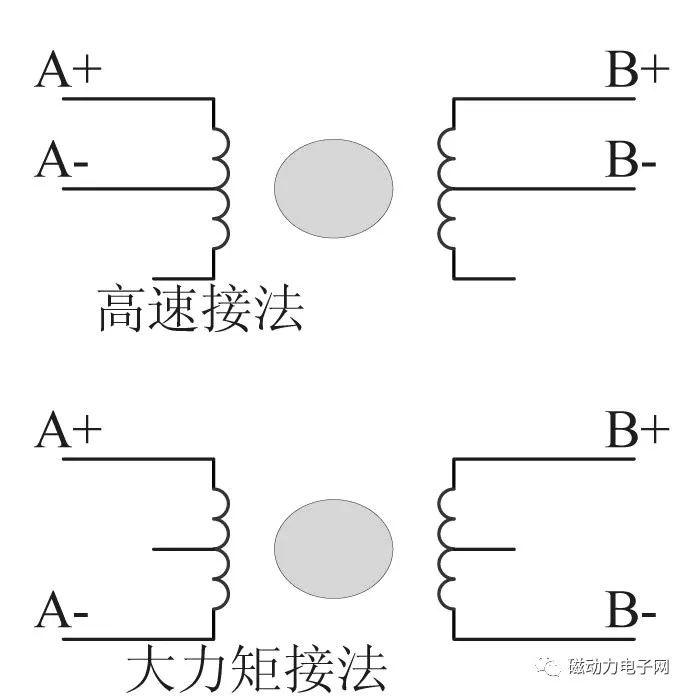
圖十七 6線雙極性步進電機的2種接法
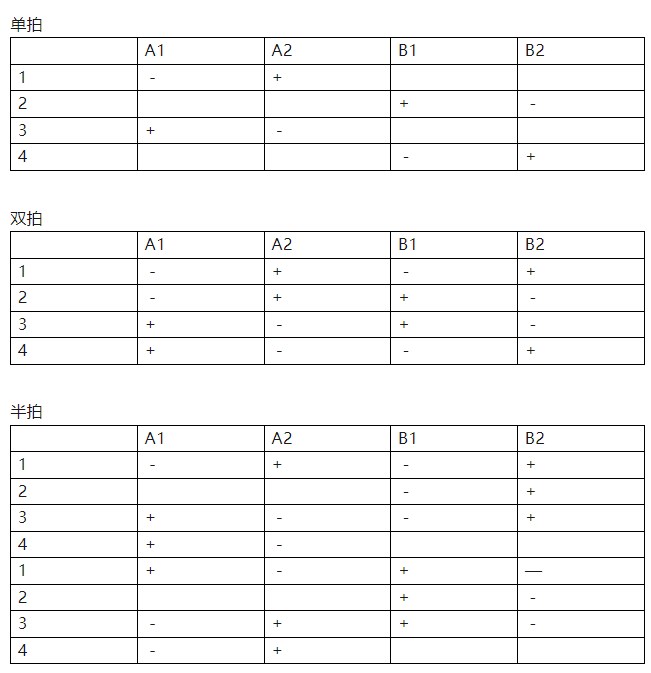
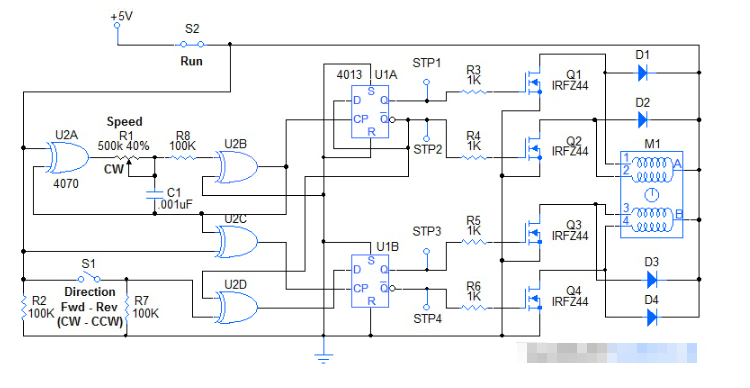
因為雙極性的繞組是需要在兩個方向上通電的,所以在驅動電路上需要一個H橋電路,通過控制H橋的導通和關閉,可以改變繞組引線上的電流方向,從而實現電機的轉動控制。雙極性步進電機同樣具有單極性步進電機的步進方式。時序如下三表。
選用步進電機時可以分以下幾步:
1.步進電機的尺寸一般會有42、57、86、110等,是指安裝孔的間距,通常相同安裝孔間距而機身長度越長的電機,力矩會越大。
2.步距角取決于負載精度的要求,將負載的最小分辨率(當量)換算到電機軸上,每個當量電機應走多少角度,而電機的步距角應等于或小于此角度步進電機的步距角一般有0.36度/0.72度(五相電機)、0.9度/1.8/3.6/7.2.度(二、四相電機)、1.5度/3度(三相電機)。
3.保持轉矩也稱靜力矩,是指步進電機通電但沒有轉動時,定子鎖住轉子的力矩。它是步進電機最重要的參數之一,如果商家說這步進電機是2N.m的,在沒有特殊說明的情況下是指保持轉矩為2N.m的步進電機
4.電流 靜力矩一樣的電機,由于電流參數不同,其運行特性差別很大,可以參看電機的特性曲線,但一般要求不高的話,可以直接參考需要使用的驅動器最大電流值,電機電流應小于或等于驅動器的最大電流。
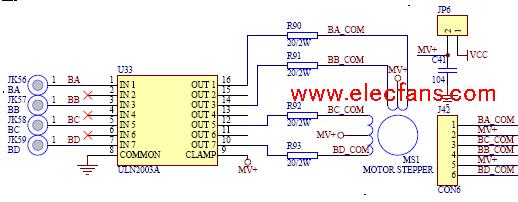
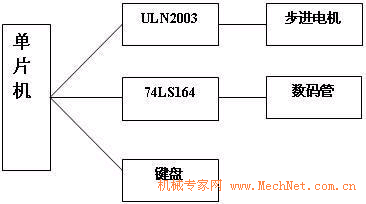
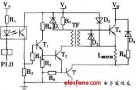
如果需要自己制作單極性步進電機驅動電路,小電流的可以用使用ULN2003,大電流可以用分立的晶體管來分別控制每一相的電源導通。雙極性步進電機在驅動時電源需要換相,所以要有2個H橋電路去控制,小電流的雙極性電機可以使用L293、L293D、L298等常用又價廉的集成IC去制作簡單的驅動。如圖十八則是L293D用于驅動雙極性步進電機時的典型電路。如果是需要大點電路或需要更加高精度和高性能的驅動,其電路復雜不適合自制,最好建議購買現成的驅動器。市場上國產步進電機驅動器比較多見的是東茂、白山、雷賽等,步進電機品牌國內外常見的有三洋、東方、雷賽、研控、白山等。圖十九是國內一款雙極性步進電機驅動的外觀圖。
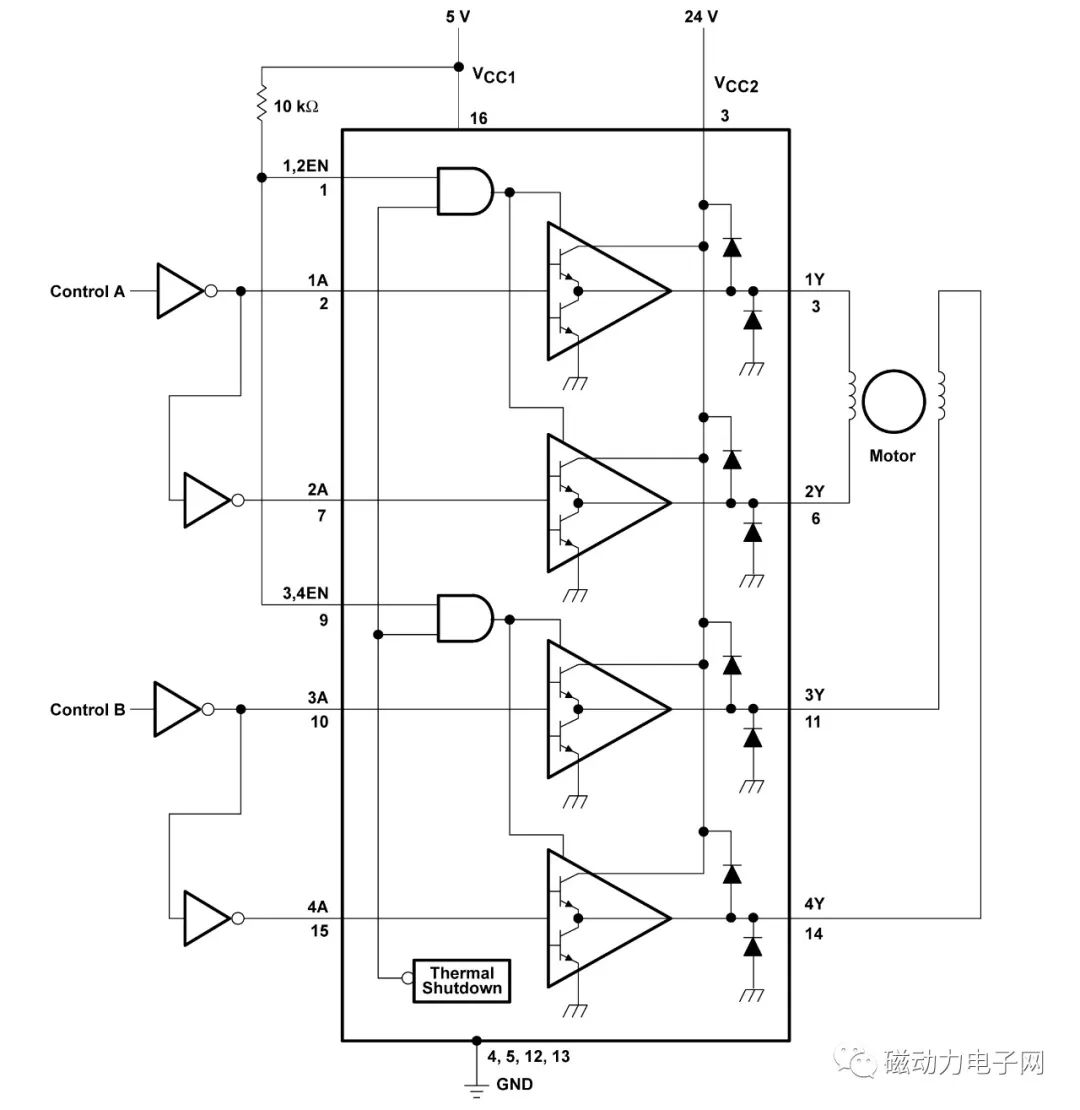
圖十八 L293D驅動電路
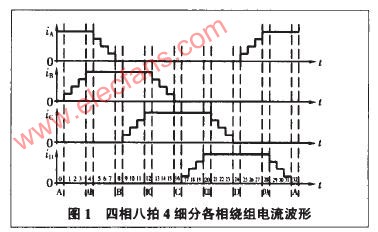
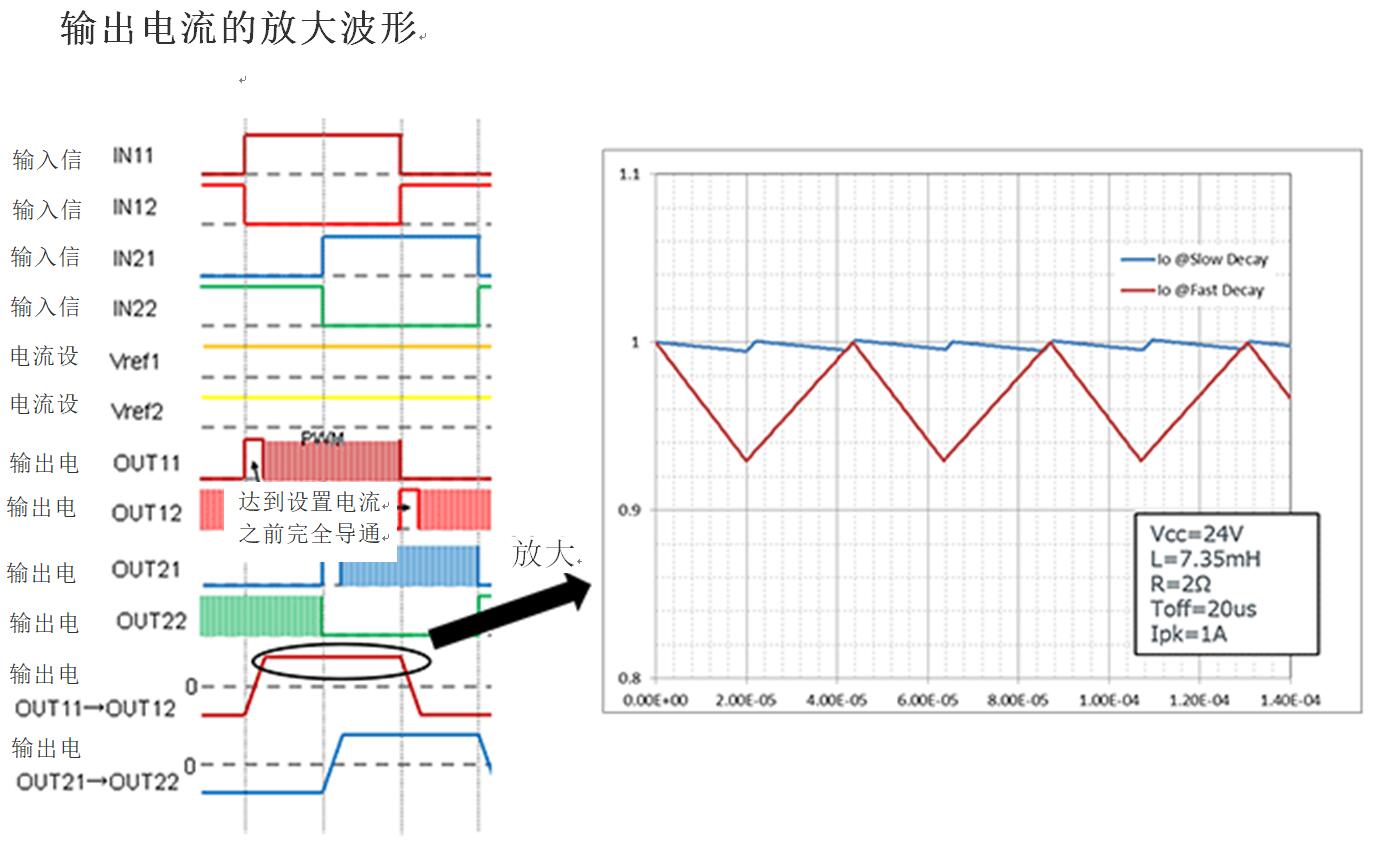
在步進驅動IC或步進驅動器中常會用到一個技術名詞-“細分”,這個技術原理和上面說的半拍模式相擬,是一種電子阻尼技術,通常是使用專用IC或MCU控制電動機各相繞組中電流的大小和比例,使步距角減小到原來的幾分之一至幾十分之一甚至更高,同時極大改善步進電機運行的平穩性,是高級步進驅動器中不可少的技術。比如說一只1.8度步距角的二相步進電機,旋轉一周所需要的脈沖當量是200,但如果使用了10細分的步進驅動,則需要2000個脈沖才可以完成,也就是每個脈沖使電機軸轉了0.18度,這樣就得以把步進分辨率提高了10倍。由于步進電機工作原理的原因,當步進電機工作在低速時,特別是使用單、雙拍這樣的整步步進方式極容易產生振動,這樣就需要使用驅動器細分技術減少或克服這個對電機工作不利的振動產生。步進電機的輸出力矩是隨轉速升高而下降,一般的混合式步進電機最高工作轉速在300~600RPM。步進電機的控制為開環控制,沒有反饋信號可以處理,當步進電機的啟動頻率過高或負載過大時很容易出現丟步或堵轉,還有就是停止時轉速過高時易出現過沖。所以在實際使用中,在要求高的條件下,需要控制軟件或控制器使用運動曲線去控制步進電機在啟動、運轉、停止三個階段的轉速,去克服這些問題。在愛好者們的一般應用中可以不去考慮太多這些,如在機器小車的制作,使用步進電機來帶動車輪,精度要求不高,只要能驅動起來就可以了,但在不使用閉環系統時會比使用直流電機更容易得到更好的位移精度。
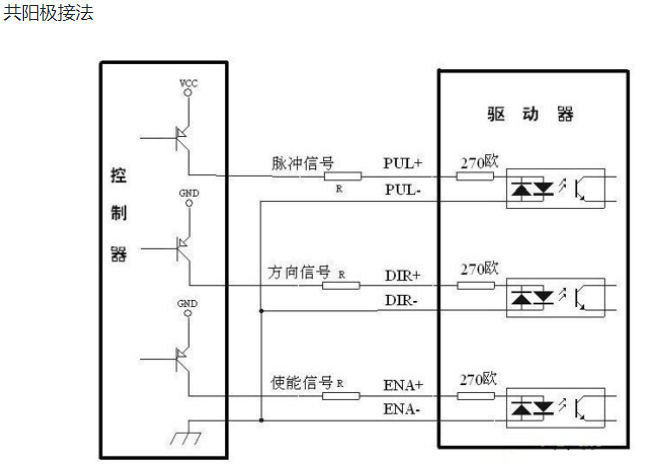
通常成品的步進驅動有如下的信號引腳(可能編號會因廠商不同而與不同),有些只可以接收單脈沖信號,有些是可以接收單脈沖信號和雙脈沖信號
PUL 步進脈沖信號
DIR 方向脈沖信號(雙向脈沖時為反轉脈沖)
FREE 脫機信號,也就是關閉驅動器輸出,電機靜力矩消失
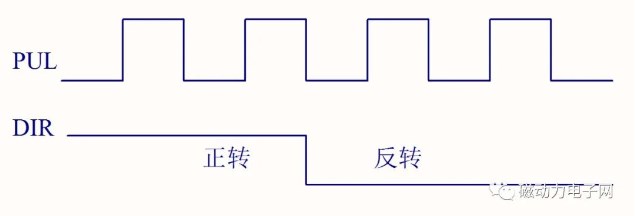
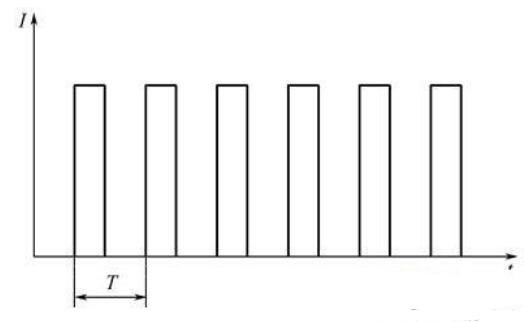
圖二十是單脈沖信號的示意圖,PUL的每個脈沖控制電機步數,而DIR則指示正反轉。
圖二十
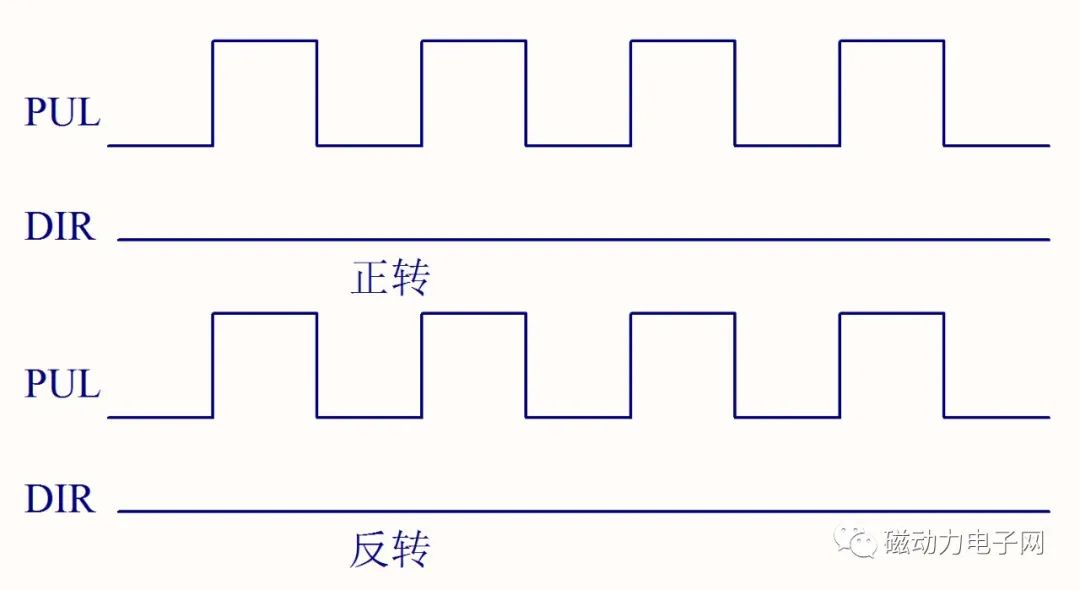
圖二十一是雙脈沖信號的示意圖,每個信號引腳指示一個運轉方向,脈沖數則同樣用于控制步數。
圖二十一















 工商網監
工商網監
評論