通過分析造成SCARA機械手的誤差因素原因,從而為了提高機械手的絕對定位精度,可以通過以下兩大類方法來實現
2020-05-17 10:21:00 3103
3103 `小型搬運碼垛機器人是專門為實現小型柱狀物料搬運及碼垛的移動機械手,能夠完成中國教育機器人。大賽的搬運碼垛競賽任務。機器人的移動由兩輪伺服電機驅動,萬向輪協助轉向,并用多個循線傳感器輔助完成復雜路線
2016-04-01 14:18:48
教育機器人搬運碼垛套件采用Openduino龍人寶貝機械手完成不同色塊的搬運碼垛任務。Openduino龍人寶貝機械人手由兩輪差動移動平臺和四自由度機械手的組成,能夠方便地外擴各種傳感器,完成各種搬運碼垛作業任務。機器人采用框架結構,拆裝方便。
2016-03-29 10:22:15
機械手plc
2012-05-28 16:07:10
在設計機械手工作安全區時,安全區呈矩形。當兩個安全區相鄰時,其實它們覆蓋的區域都是安全區,而機械手在實際工作時,不能從它們中間直接走,必須從上面繞一下才行,怎么解決呢?
2019-02-28 15:53:25
機器人注塑機機械手,機械手在現代制造技術領域中扮演了著越來越重要的角色,其能自動化定位控制并可重新編程序以變動的多功能機器,并有多個自由度,可用來搬運物體以完成在各個不同環境中工作。 目前市場上,包裝市場和注射成型市場已經成為了機械自動化的兩大主要領域。 `
2012-09-21 09:33:00
原子哥,問你一個舵機問題,我做了一個機械手臂,買了個7.4v的航模電源,不知道怎么鏈接。一開始,我給舵機,單片機和電位器直接供電,但不知咋了,冒煙了,能不能告訴我怎么辦啊,是不是要降壓什么的,真心不懂,求教!!!!
2019-06-11 03:49:35
開篇:機械手設計挑戰——仿人機器人設計領域上的高峰
2019-07-24 15:25:54
注塑機機械手的驅動系統一般可分為液壓驅動,氣壓驅動和電力驅動等三類,也可以根據工作要求采用上述三種類型的組合系統來完成驅動。在設計選用驅動系統時應注意以下幾點: (1) 根據機械手的負載量來確定
2012-09-10 09:51:04
用Labview怎么控制機械手動作,有沒有這方面學習的視頻或資料
2018-04-18 15:33:20
機械手是一種能模仿人手、臂的某些動作功能的自動操作裝置,用于按固定程序抓取、搬運物體或操作工具。機械手是最早出現的工業機器人,也是最早出現的現代機器人,它可以代替繁重的勞動實現生產的機械化和自動化
2021-04-27 09:49:47
`申請理由:機智云GoKit這款開發套件內部資源非常強大想用作為機械手主控驅動舵機,制作成六自由度機械手,完成各種動作。項目描述:想用機智云GoKit驅動六軸智能機械手,初步計劃是用GoKit為主控,采用藍牙與主控通信,主控控制舵機驅動器,控制舵機驅動角度,完成抓持等一系列動作。`
2015-11-02 10:46:33
我又帶著問題來了 LabVIEW和機械手通信設備總是要有個暫停和繼續運行的按鈕我界面做了個暫停按鈕,可是這個暫停按鈕只暫停機械手的程序,并不暫停labview的程序。暫停的時候我labview
2021-06-21 10:40:49
`本人新帶技能大賽,有關單片機控制機械手模塊,剛接觸一點也不會,大賽迫在眉睫,有沒有會的大神幫忙設計一下程序及畫出模塊圖`
2016-04-24 10:11:44
機械手可代替人的繁重勞動以實現生產的機械化和自動化,能在有害環境下操作以保護人身安全,因而廣泛應用于機械制造、冶金、電子、輕工和原子能等部門。機械手是一種能模擬人的手臂動作,依照設定程序、軌道和請求
2021-07-13 13:59:58
`力泰科技資訊:數控車床機械手因其價格低、速度快、精度高、質量好等優點深受企業家的青睞,數控機床和桁架機器人共同構造成一個柔性單元可以節省龐大的工件輸送裝置,而且桁架機械手結構簡單,適用性強。第一次
2018-08-08 14:34:35
`力泰科技資訊:桁架式自動上下料機械手能夠實現自動控制的、可重復編程的、多功能的、多自由度的、運動自由度間成空間直角關系、多用途的操作機。它能夠搬運物體、操作工具,以完成各種作業。桁架機器人的出現
2020-11-25 15:24:58
`力泰科技資訊:搬運機器人是比較常見的一種機器人,一般選擇3-6軸會比較多一點。軸數更多意味著自由度更高,更靈活,在較狹小的空間也能靈活運動,這就意味著6軸搬運機械手的造價相對于軸數少的多關節機器人
2018-08-14 09:37:05
工人的工作量,而且機器人跟人工相比,可以實現24小時不間斷工作。所以,再牛的自動化車間都少不了搬運機器人。本文出自力泰科技轉載請注明出處關鍵詞:搬運機器人廠家 智能搬運機器人 倉庫搬運機器人 自動搬運機械手
2018-08-20 11:21:01
機械手臂下不來,傳感器能感應到就是下來抓東西的時候卡著不下來左右可以移動,程序沒有問題,是不是機械出現問題了,求各位大神幫忙解決一下問題。
2018-09-29 09:28:42
410c的開發板做一個機械手臂,于是就去看了一下,搜集了一下資料。相信說到機械手臂大家腦海中都會自己腦補各種機械手臂,機械手臂是機械人技術領域中應用的最廣泛的自動化機械裝置,在很多領域,像工業、醫療、農業
2018-09-25 16:43:30
如何對機械手進行組裝并且調試呢?
2022-01-20 07:05:01
研究目標設計一款基于STM32的仿生機械手:(1)基于STM32的仿生機械手實現無線控制和有線控制。 (2)實現串口指令控制仿生機械手動作。(3)實現仿生機械手具有多種工作模式。(4)實現數據手套
2022-01-07 06:55:18
請問一下如何進行ABB 120六軸機械手臂的程序編寫呢?
2021-09-15 07:43:37
大家好,請教一下。有沒有一個ISO指引機械手電源安規是應該遵循什么樣的安規標準。如IEC 60590-1就有明確指引屬于通訊類的產品的電源。路由器、基站這些供電電源可以參考IEC 60590-1。是否也有專門的機械手系統電源的安規?感謝~
2021-02-01 09:49:26
怎樣去編寫機械手臂的程序?有大神遇到過這個問題嗎
2021-07-02 07:23:12
`日本JEL晶圓搬運機械手,中國代理,歡迎來電 ***.`
2015-07-28 13:03:05
機械手是一種能模仿人手和臂的某些動作功能,用以按固定程序抓取、搬運物件或操作工具的自動操作裝置。特點是可以通過編程來完成各種預期的作業,構造和性能上兼有人和機械手機器各自的優點。驅動機構機械手所用
2021-07-01 07:04:52
` 注塑機專用機械手的手部是用來直接抓取注塑制品的部件。由于注塑制品的形狀,大小,重量及表面特征等方面存在著差異,因此注塑機械手的手部有多種形式,一般可分為夾持式和吸附式兩種。夾持式手部的主要形式為
2012-09-08 10:35:41
`注塑機機械手的所有動作都在控制系統的指揮下完成,尤其是機械手與注塑機的協調工作關系,更是要依賴控制系統來達到。在控制系統的指揮下,機械手按照預定的工作程序完成各個動作,從而將注塑生產出的制品從模具
2012-09-11 09:43:54
、使用網口相機和集成工控機,性能穩定可靠3、軟件可操作性好,可支持與觸摸屏聯機操作4、通過識別產品特征,計算產品偏移值,控制機械手進行定位抓取5、可根據客戶具體機型進行定制化的高效方案6、機械手操作靈活
2021-05-18 09:40:06
體的部件分揀和裝配都是靠人工完成的,耗費人力、物力和時間,同時效率低下。四元數針對上述問題及技術需求,研發了一種基于機器視覺的機械手視覺分揀系統,該系統可以實現部件的自動分揀,提高效率。四元數機械手視覺
2021-09-22 15:33:10
國際工業機械手中較為先進和應用最為普遍的能夠較大程度代替人工的自動化設備。四元數關節式機械手系統是模仿人的手部動作,按給定程序、軌跡和要求實現自動抓取、搬運和操作的自動裝置,特別是可在高溫、高壓、多
2021-10-21 13:46:57
、文字或不規則圖形等特征四元數致力于運動控制、圖像與視覺傳感等工業自動化技術的研發和應用,產品廣泛應用于印刷設備、模切設備、貼合設備、多軸數控設備、機械手、電子加工和檢測設備、激光加工設備、拋光機械生產自動化等工業控制領域。
2021-08-11 09:43:18
哪位大俠那里有愛普生機械手的資料啊!
2014-04-11 20:36:53
。本文出自力泰科技轉載請注明出處關鍵詞:搬運機器人廠家 智能搬運機器人 倉庫搬運機器人 自動搬運機械手 自動化搬運設備 智能物流搬運裝置 自動搬運系統 工業搬運機器人全自動搬運機械手 自動化吸盤機械手 流水線搬運機器人 碼垛機器人 自動化搬運生產線 搬運機器人`
2018-08-13 11:14:15
五軸機械手主臂的負載慣量是如何去計算的?五軸機械手主臂的負載轉矩是如何去計算的?
2021-06-28 09:17:36
思路是用labvie輸出串口信號控制一個舵機控制器,機械手的相應算法在labview編制的程序中完成,那么我肯定要用到D-H變換之類的算法,相應的運動控制或機械手控制算法應該是有模塊的吧,好像還能仿真吧,我應該要下載哪些呢?通過算法計算后,最終的目的是輸出角度信號給舵機,讓舵機運動。
2015-07-15 17:26:24
`我打算買個六軸機械手模型用來驗證自動運行算法,但不知道從機械角度上來來說哪種實驗性能更好,可擴展性更好,這兩種都是數字舵機帶動的。麻煩給出為什么的理由,謝謝!左上角那種好像是工業機械手的模型,右下角那種是什么呢?兩種應該都可以用來做機械手實驗吧`
2015-07-15 17:00:59
項目介紹: 本項目基于液壓控制的搬運機械手,其控制結構采用ATmega16 8位單片機,利用Proteus與Atmel Studio6.0軟件進行控制并仿真,可以實現設備的良好運行控制,為全自動數控
2016-08-04 13:43:54
由STM32控制的機械手,上位機程序是由C#編寫的用串口與單片機通訊。機械手有三個舵機組成和一個電磁鐵組成。視頻地址:http://www.iqiyi.com/w_19ru5ldh91.html
2017-01-26 13:13:42
PLC機械手控制的實現二、設計要求:1. 闡述機械手的工作原理2. 如何實現PLC對機械手的控制3. 機械手控制程序設計第一節 機械手的工作原理1.1 機
2008-12-13 14:15:22 369
369 基于現場總線的開放結構機械手控制系統是目前機械手控制的發展方向。文章通過對物料搬運機械手裝置及其控制系統的介紹,提出了基于CAN 總線的機械手控制系統方案,分析了
2009-06-03 09:10:2928 機械手資料
mechanical hand, 也被稱為自動手,auto hand 能模仿人手和臂的某些動作功能,用以按固定程序抓取、搬運物件或操作工具的自動操作裝置
2010-03-31 14:57:24286 實驗 機械手的PLC的自動控制一.實驗目的1. 掌握機械手步進控制程序設計2. 進一
2008-09-30 12:27:204796 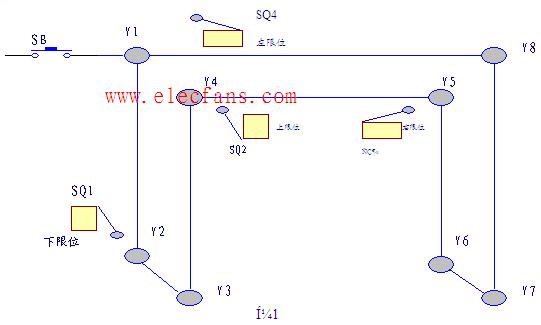
機械手行車控制電路
2009-02-09 16:13:081324 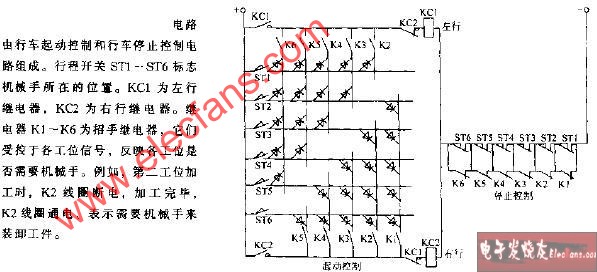
PLC在機械手控制系統上的應用
機械手在工業生產中得到廣泛的應用,傳統工藝中采用繼電器控制時,需要的繼電器多,接線復雜,因 此
2009-06-17 13:35:479786 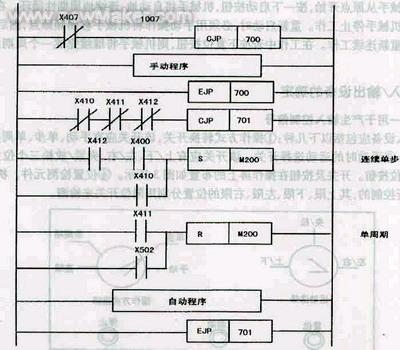
PLC在機械手步進控制中的應用
機械手是工業自動控制領域中經常遇到的一種控制對象。機械手可以完成許多工作,如搬物、裝配、切割
2009-06-19 14:11:081417 
兩臂繪圖機械手
一、任務設計一套機械手系統,該系統有兩個固定長度的臂(AB、BC)和兩個轉軸(轉軸1、轉軸2)構成。在轉軸1 和
2009-08-02 08:37:111848 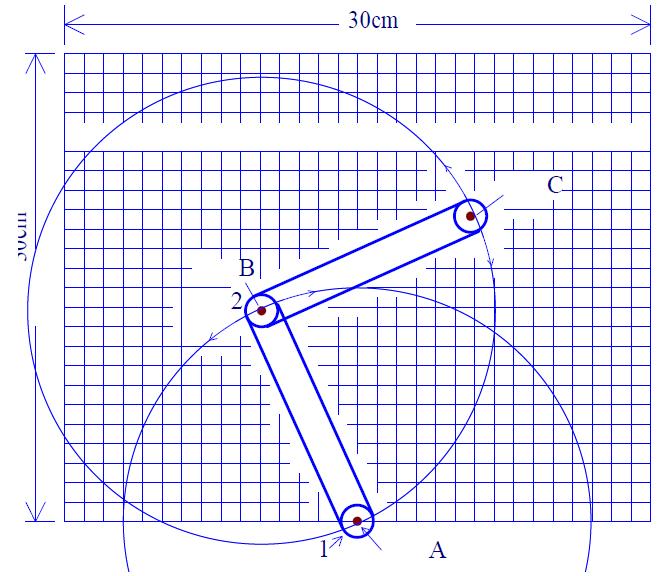
提醒廣大機械手用戶朋友,在拆除機械手的時候,應注意以下步驟: 1.關掉射出機電源。 2.關掉機械手電源。 3.關掉機械手氣壓源。 4.洩除空壓。 5.放
2010-07-28 09:51:233486 一四軸聯動簡易機械手的結構及動作過程 ??? 機械手結構如下圖1所示,有氣控機械手(1)、XY軸絲杠組(2)、轉盤機構(3)、旋轉基座(4)等組成。
2010-08-02 18:17:315702 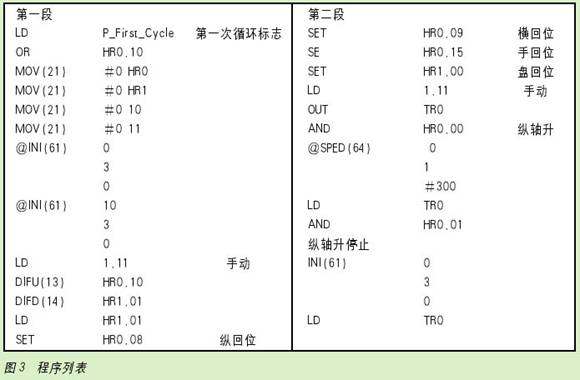
通過對物料搬運機械手裝置結構與功能的介紹,提出了一種電氣伺服和氣動伺服相結合的混合驅動機械手結構類型,重點分析了基于45, 的機械手控制系統組成,并詳細論述了以45, 為核
2011-08-15 17:49:36101 基于PLC的機械手控制設計(畢業設計)基于PLC的機械手控制設計(畢業設計)
2015-11-13 11:21:000 基于單片機設計控制的C語言的機械手臂的控制設計
2016-06-15 17:36:4258 基于單片機設計控制的C語言的機械手臂的控制設計
2016-06-15 17:36:4262 本資料介紹了拓斯達機械手的操作和設置方法!
2016-06-23 17:56:19218 SOLIDWORK格式,可以看到整個機械手臂的工作原理
2017-03-24 17:08:5315 方案背景隨著科學技術的發展,人們已經進入了一個信息化、機械化、智能化的時代,而其中最具代表意義的就是機械手技術。機械手的使用范圍也十分廣泛,在工業生產、軍事、航空航天等領域都有著大量的應用。
2017-07-17 11:33:581 。從自動化生產線到海洋資源的探索,乃至太空作業等領域,機械手已成為高技術領域內具有代表性的戰略目標。然而就目前的機械手技術水平而言,機械手在信息的獲取、處理及控制能力等方面都是有限的,對于復雜的工作任務及多
2017-10-16 11:34:561 東芝機械手手動控制示教操作
2017-10-20 10:23:527 隨著機械手應用的迅速發展,機械手應用領域也越來越多,尤其是在那些對人員產生傷害的方面, 因此機械手零件的品種也開始多種多樣,產量也隨之提高。而面對繁雜多樣的機械手零件品種和龐大的數量,傳統的生產管理
2017-12-12 19:45:02484 
了新的革A 互聯網+和工業技術的相互結合,更多的智能化的產品逐漸面世。而文中則將當下較為熱門的體感操作和傳統工業中的機械手相互結合,探索一種全新的機械手操作方式體感操作機械手。區別于傳統的機械手的示教編程的操作方式,體感機械手利用體感傳感器
2018-01-22 17:14:588 機械手設計必看
2018-02-01 15:14:5472 氣動平衡助力機械手,是氣動輔助人力,由人工操縱的機械手。使用氣動助力機械手可以降低操作人員的勞動強度,實現搬運大質量T件時操作輕便和定位 ,準確,保證設備和操作人員的安全。氣動平衡助力機械手操作簡單
2018-02-28 14:08:202 針對目前傳統抓胎機械手在取胎過程中易發生胎坯變形不對稱和變形量大的問題,對抓胎機械手取胎過程巾影響胎坯縱向和橫向變形的主要因素進行了研究,提出了定位內撐一體的抓取方法;并結合實際宮作要求
2018-03-07 16:36:221 針對現有高速列車車廂預裝配實驗平臺制造成本高,重復利用率低,定位精度差的問題,對裝配對象結構特征、裝配工藝需求等方面進行了研究,提出了一種基于曲面特征點離散化法及多點柔性夾持技術的列車預裝配柔性實驗
2018-03-20 17:59:270 桁架式機械手(Truss Type Manipulator),則指以桁架導軌為運動路徑,主要進行水平與垂直的直線移動,在生產線中穿插于不同加工機械之間,負責零件的抓取與上料工作的機械手。
2018-08-14 17:46:233570 等來分類。 按驅動方式可分為機械式機械手、液壓式機械手、氣動式機械手和電動式機械手等。 按搬運重量可分為微型機械手、小型機械手、中型機械手和大型機械手等; 按坐標型式可分為直角坐標式機械手、圓柱坐標式機械手、極坐標式
2021-02-24 15:12:55539 介紹一種生產線搬運機械手電氣控制系統,以PLC為核心進行系統的硬件開發和軟件設計。闡述機械手的結構、工作原理,合理選取系統硬件,詳細設計步進驅動控制程序和HMI監控系統,實現搬運機械手夾放、定位和監控等功能。
2019-05-13 08:00:007 機械手能模仿人手和臂的某些動作功能,用以按固定程序抓取、搬運物件或操作工具的自動操作裝置。它可代替人的繁重勞動以實現生產的機械化和自動化,能在有害環境下操作以保護人身安全,因而廣泛應用于機械制造、冶金、電子、輕工和原子能等部門。?
2019-06-12 15:54:1114828 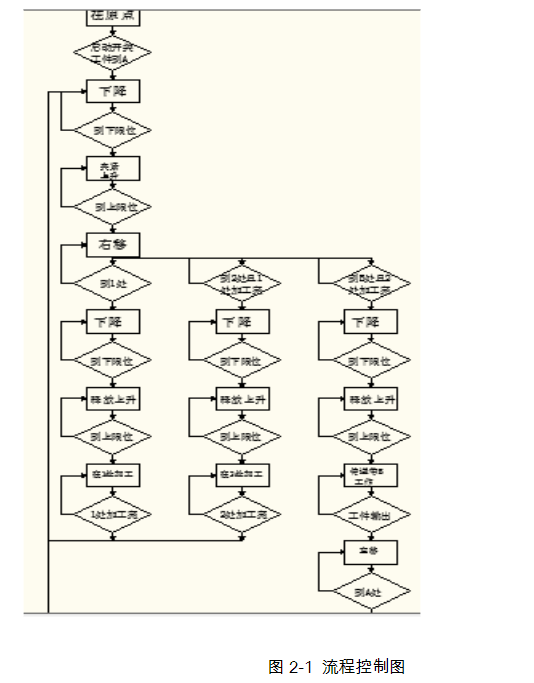
直角坐標式機械手是適合于工作位置成行排列或傳送帶配合使用的一種機械手。它的手臂可以伸縮,左右和上下移動,按直角坐標形式x、y、z 3個方向的直線進行運動。其工作范圍可以是1個直線運動、2個直線運動
2019-06-12 16:59:234692 工業機械手是近十幾年來出現的一種技術裝備,它能模仿人體上肢某些動作,在生產過程中代替人搬運物件或操持工具進行操作。在工業生產中應用機械手,可以提高勞動生產率、保證產品質量,減輕工人勞動強度,實現
2019-12-25 08:00:0082 物料搬運機械手由機械手和物料分揀兩部分裝置組成。如圖1所示,機械手主要由機座(采用步進電機驅動旋轉)、水平手臂(采用直線坐標氣缸HMP-20-200)、垂直手臂(采用滑塊氣缸SLT-16-50
2020-05-17 10:10:001663 機械手是一種能自動化定位控制并可重新匯編程序以變動的多功能機器。它有多個自由度,可用來搬運物體以完成在各個不同環境中的工作。工業機械手是近似自動控制領域中出現的一項新技術,并已成為現代制造生產系統中的一個重要組成部分。
2020-05-17 09:19:071112 碼垛機械手是由機械臂和抓手兩部分組成,它能模仿人手和臂的動作,用以抓取和搬運物件以達到碼垛的效果。碼垛機抓手根據被抓持物件的形狀、尺寸、重量、材料和作業要求而有多種結構形式,如夾持型、托持型和吸附
2020-08-21 15:25:014392 機械手是進袋自動控制領域出現的一種新型技術裝備,能模仿人體上肢某些動作,在生產中代替人搬運物體或操持工具進行動作,已成為機械制造系統中的一個重要組成部分。 碼垛機械手能將不同外形尺寸的包裝貨物,整齊
2020-09-06 10:37:04759 隨著機電一體化技術和計算機技術的應用,工業機械手的研究和開發水平獲得了迅猛的發展并涉及到人類社會生產及生活的各個領域,特別是碼垛機械手在生產加工中的應用。機械手是進袋自動控制領域中的一種新型技術
2020-10-16 10:23:231972 機械手臂是機械人技術領域中得到最廣泛實際應用的的自動化機械裝置,在工業制造、醫學治療、娛樂服務、軍事、半導體制造以及太空探索等領域。機械手臂有多種不同的結構形式,懸臂式、直立式、橫立式、龍門
2020-12-14 11:32:534147 機械手臂是機械人技術領域中得到最廣泛應用的的自動化機械裝置,在工業制造、醫學治療、娛樂服務、軍事、半導體制造領域應用普遍。機械手臂有多種不同的結構形式,懸式、直立式、橫立式、龍門式,又根據軸關節
2021-01-05 14:52:28685 制造業現在大力開展工業自動化,全自動碼垛機械手推動傳統制造業自動化水平提升發揮著不可忽視的作用,使制造業廠家生產效率進一步提升。全自動碼垛機械手又稱機械手、碼垛機器人、自動搬運碼垛設備、堆垛機、垛碼機等,它
2021-05-27 14:58:141540 全自動碼垛機械手能模仿人手和臂的某些動作功能,用以按固定程序抓取、搬運物件或操作工具的自動操作裝置。全自動碼垛機械手是較早出現的工業機器人
2021-11-05 15:51:031260 機械手是可以實現搬運的裝備,近年逐漸受到眾多企業的青睞而不斷提升,目前還可為其構建機械手微操作力系統,使用微操作力控制機械手有什么優勢? 傳統的物料搬運設備在有效性、精確性和安全性等方面的作用非常
2022-04-08 15:30:091284 肥料粉料拆包破包上料機械手其速度是人工拆包速度的3-5倍左右,因為可以連續作業,實際的拆包速度可以達到人工拆包速度的5-8倍以上,它性能良好,拆垛破包質量好,拆垛破包速度快,能題高企業生產效率,可實現對袋料的拆垛破包作業,滿足大多數企業對物料搬運和拆垛破包的要求
2022-09-13 10:48:23168 電子發燒友網站提供《使用EMG的機械手控制.zip》資料免費下載
2022-11-07 11:02:501 拆包機械手
2023-03-23 11:11:28356 平面關節型機械手設
2023-05-29 11:11:330 直線模組在機械手中的應用
2023-08-04 17:48:22816 
觸覺感知技術在人機交互領域具有重要價值。分布在軟體機械手的觸覺傳感器能夠在非結構化的場景交互中為人們提供多模態感知信息,如接觸狀態(穩態、滑動、扭轉等)、表面特征(粗糙度、紋理、曲率等)、物理屬性
2023-10-18 10:35:04223 直線模組是一種常見的機械傳動裝置,廣泛應用于機械手等自動化設備中,在機械手中的主要作用是實現機械手的運動控制和定位。
2023-12-07 17:38:28226 
? ? ?隨著科技的不斷發展,許多傳統行業正在逐漸引入自動化技術,以提高生產效率和降低成本。面粉廠也不例外,其中碼垛機械手作為一種自動化設備,已經逐漸成為面粉廠中不可或缺的一部分。本文將探討面粉廠
2023-12-28 16:43:14139 ZR機械手:技術升級,推動產業變革 隨著科技的飛速發展,自動化設備在各個產業領域中的應用越來越廣泛。作為自動化設備的重要組成部分,機械手在提高生產效率、保證產品質量、降低勞動成本等方面發揮
2024-01-11 09:21:59143 很多人希望多分享一些PLC具體應用和維護的案例,滿足大家的要求。今天咱們來談一談如何利用PLC來實現簡單的搬運動作,讓機械為人服務!
2024-01-18 13:52:24400 
搬運機械手是工廠、流水線上非常重要的角色,用于完成對貨品或工件的取放動作。搬運機械手能否做到流暢的工作,穩定且更有保障的持續安全供電連接是非常關鍵的一環。YM系列連接器為搬運機械手提供連接支持搬運
2024-02-19 14:03:4581 
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論