使用加速度傳感器與陀螺儀來精確推算出具體的位置。愛普生(EPSON)就基于這種環境,研發出了這一款高精度導航陀螺儀——XV7001BB。
2024-03-20 09:36:56 68
68 
EPSON除了有源無源晶振、實時時鐘模塊以及可編程晶振讓大家廣為熟知,并且它的陀螺儀傳感器技術也在相關領域成為了基石,承擔著舉足輕重的作用,今天就讓南山電子小編來帶大家了解一下愛普生(EPSON)應用于割草機慣性導航高性能陀螺儀傳感器SGPM01。
2024-03-19 11:38:5558 
STM32H743VGT6用來測量秒誤差能達到的最高精度是多少
2024-03-14 07:26:46
以激光陀螺儀為核心部件的導航系統是一種慣性導航系統,相對于大家耳熟能詳的GPS和北斗等衛星導航系統,熟知慣性導航系統的人很少。
2024-02-23 18:09:091201 據麥姆斯咨詢報道,近期,慣性傳感器研發商原極(上海)科技有限公司(簡稱:原極科技)獲得數千萬元A輪投資。
2024-01-23 09:39:21393 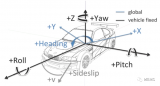
漂移誤差、隨機誤差、系統誤差這三種誤差到底是怎么引發的?如何對矢量網絡分析儀校準呢? 漂移誤差、隨機誤差和系統誤差是在矢量網絡分析儀(簡稱VNA)測量過程中可能出現的三種誤差類型。它們的引發原因和解
2024-01-19 15:42:16201 關于慣性測量單元的應用場景闡述
2024-01-19 11:25:22288 無錫瑞吉星電子的RJX-IMU-164系列;
參數如下:
一 、概述
RJX-IMU-16460高精度慣性測量單元是一款小型高精度MEMS慣性測量單元,可與ADIS-16460實現原位插拔替換、內部
2024-01-18 13:46:16
據麥姆斯咨詢報道,綜合電子元器件全球制造商村田(Murata)近日發布了一款新的6軸MEMS慣性傳感器SCH16T-K01,可實現高精度機器控制和定位應用。
2024-01-17 09:59:57483 
量程內所引入的偏差。由于數字電壓表采用了分段模擬量程或模塊化模擬量程的方式,量程上存在許多切換開關和電阻等元件,這些元件的特性會引入一定的誤差。此外,電阻器的精度以及切換開關的接觸不良等因素也會導致量程誤差的產生
2024-01-16 15:35:48248 編輯:鐳拓激光小幅面精密激光切割機是一種高精度的加工設備,切割精度是衡量性能重要一項。切割精度誤差范圍的大小直接影響到加工質量和生產效率。解和掌握小幅面精密激光切割機的切割精度誤差范圍對于實際應用具
2024-01-16 11:17:08118 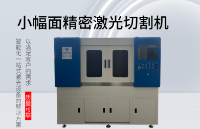
一般描述M-G552PJ1是一個小的形狀因子慣性測量單元(IMU),具有6個自由度:三軸角速率和線性加速度,并提供了高穩定性和高精度的測量能力與使用的高精度補償技術。通過控制器局域網(CAN)接口
2024-01-12 10:56:27 0
0 M-G370PDS0是一個小的形狀因子慣性測量單元(IMU),具有6個自由度:三軸角率和線性加速度,并提供高穩定性和高精度的測量能力精密補償技術。各種校準參數被存儲在IMU的存儲器中,并且是
2024-01-11 09:55:450 AD轉換器具有很高的精度和準確性,但它們仍然會存在誤差。本文將詳細探討AD轉換器產生誤差的原因。 第一,量化誤差是AD轉換器最主要的誤差源之一。當模擬信號被離散化為數字信號時,模擬信號的連續幅度范圍會被劃分為一系列的離散量化級別。量化誤差是指模擬信號的實際值與離
2024-01-09 11:02:48455 工程監測中振弦采集儀的精度校正與誤差分析 工程監測中,振弦采集儀是一種常用的測量設備,用于測量結構物的振動情況。為確保測量結果的準確性,需要對振弦采集儀進行精度校正和誤差分析。 工程監測中振弦采集
2024-01-05 14:49:12118 
在對LTC6806的芯片測試后轉換出的結果與實際有較大誤差,在±50mv左右,請問在操作中哪些問題可能造成轉換后的精度較差?同時通過輔助寄存器讀到的2nd Reference Voltage約為2.9V,實際測量為2.5V,請問是否與之存在關系。
2024-01-04 08:02:43
,電流有效值:1.140A,PF值0.973,有效功耗:259.1W
其中電壓有效值有1-5V的誤差,有效功耗也有誤差,但此數據是未進行校正的,請問正確嗎?
未校正的精度能達到多少呢?謝謝
2023-12-26 07:55:11
伺服位置誤差大的原因及解決方法 伺服電機是一種精密控制裝置,可以實現高精度、高穩定性的位置控制。然而,伺服電機在使用過程中常常出現定位誤差過大的問題。本文將從機械結構、控制系統、環境因素、測量誤差
2023-12-25 13:57:521840 關于AD9748精度問題,根據PDF介紹高5位開關32路電流總和,低3位為八分之一的每一路Ic,也就是說低三位是決定最小精度分辨率的,為什么在使用過程中輸入控制字0x8,0x9,0x0A,輸出電壓
2023-12-22 07:50:36
。然而,由于電路中的元件本身的內部阻抗以及其它因素,會導致在電壓分壓過程中出現一定的誤差。在沒有電壓跟隨器的情況下,我們可以采取一系列的方法來降低誤差。 首先,我們可以選擇使用更高精度的電阻元件。在電路分壓中,電阻
2023-12-20 15:35:48377 和采樣保持,如果選的參考源很好的話AD精度就會提高,外置的采樣保持器往往比AD內部的采樣保持器要好。
我的問題是:ADC的所有誤差都有哪些?有沒有這種講所有誤差并且有公式的資料沒?我想計算下,再和實際的電路結果對比下,看看哪里可以改進。謝謝各位大牛!
2023-12-19 08:04:46
AD7793的參考電路CN0355中的5%精度電流源通過5K電阻轉換成1.05V的參考電壓,而這個電壓通過ADA4096放大10倍成為壓力電橋的恒壓電源,請問這個誤差放大后是如何抵消的?
2023-12-08 08:24:11
數據轉換器中的噪聲與誤差之間有什么關系,在設計中該如何考慮這兩者,比如說我在設計時應該考慮ADC的失調和增益誤差,還是考慮ADC的SNR?
2023-12-07 08:06:19
關于慣性導航的7大誤解
2023-12-04 15:32:25254 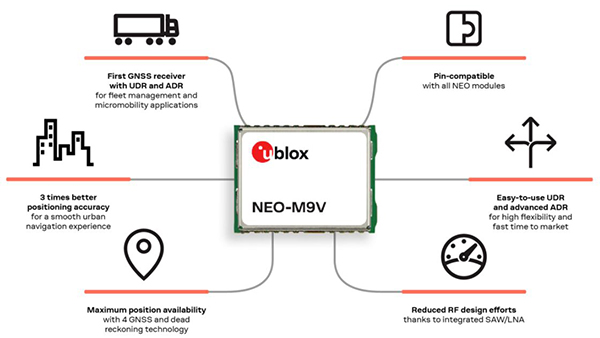
輸入誤差。輸入誤差通常由輸入信號的不確定性以及輸入電壓測量誤差引起。輸入信號的不確定性包括信號源的頻率漂移、幅度波動以及相位誤差等。輸入電壓測量誤差主要由輸入電壓測量電路引起,包括電壓測量儀器的精度問題以及電
2023-12-01 11:51:161745 你好,關于AD4114 噪聲誤差 我沒有找到SNR、ENOB等參數,應如何計算?
2023-12-01 06:19:46
導航的方法和手段有許多,最傳統的是航圖導航,最流行的是衛星導航,最具獨立性的是慣性導航;無人機上用到的是衛星導航和慣性導航。
2023-11-29 11:41:241111 
電子發燒友網站提供《使用ADIS16470和PNI地磁傳感器RM3100構建的捷聯慣性導航系統.pdf》資料免費下載
2023-11-22 10:34:480 華測導航推出的新一代cgi-430高精密慣性導航系統以系統全體頻率的gnss基礎卡和6軸戰術級imu為基礎,使用中國領航員的新一代貼合算法引擎,結合gnss、ins、dr信息進行計算。
2023-11-14 14:34:02552 pcb線路板的烘烤工藝解說
2023-11-10 14:11:35728 在被動微流控方法中,慣性微流控因具有簡單、易于制造和高通量的特性而被認為是一種良好的過濾和分離方法。
2023-11-02 09:09:38259 
在組合導航系統中,IMU提供快速、實時的運動和姿態信息,但IMU存在累積誤差,通常會與衛星定位結合使用,對IMU的數據進行校準,提高長期的導航精度。
2023-11-01 15:38:281337 
直線導軌的誤差匹配度是評估導軌之間配合精度的重要指標,導軌之間的配合精度越高,誤差匹配度就會越好,反之則越差。
2023-10-31 17:48:05619 
關于RL78/G13系列R5F100BEANA產品ADC采集誤差過大的問題
2023-10-30 17:20:36385 
電路設計中偏置電流是如何引起誤差的呢? 在電路設計中,偏置電流是一種非常重要的參考電流,它被用來控制電路的工作狀態。然而,偏置電流也會引起誤差,這些誤差可能會對電路的性能和精度產生不利影響。 偏置
2023-10-30 09:12:08338 的影響。 一、ADC失調誤差的計算 先來了解什么是ADC失調誤差。ADC(Analog-to-Digital Converter)將模擬信號轉換為數字信號,其中一個重要參數是ADC轉換精度。ADC失調誤差就是ADC轉換精度不準確的現象。 ADC失調誤差又可以分為偏置誤差和增益誤差兩種。其中,偏置誤
2023-10-25 11:50:35320 ,隨著MEMS陀螺儀的興起,在車輛導航、機械控制等領域,精確導航的競爭一直在對峙。 ? 導航核心——陀螺慣性測量單元 ? 在高精度的捷聯慣導系統中,陀螺慣性測量單元是絕對的核心。很長一段時間以來,激光陀螺儀都是中高精度慣導系統
2023-10-24 01:11:001283 轉換的應用中,ADC的精度影響到整個系統的質量和效率。為了能夠達到應有的精度,用戶需要了解ADC誤差是如何產生的和影響它的參數。轉換精度不是僅僅依賴于ADC模塊的性能和功能,它與該模塊周邊應用環境
2023-10-10 06:26:23
什么是高精度地圖
高精度地圖:(1)是和普通導航電子地圖相對而言的服務于自動駕駛系統的專題地圖(2)是包含道路形狀、道路標記、交通標志和障礙物等地圖元素(3)是涵蓋道路交通狀況實時動態信息,(4
2023-10-07 14:24:35
詳細解說pcb板表面絕緣層
2023-09-28 09:55:541494 前文《 深度剖析GNSS高精度定位原理 》介紹了高精度衛星定位技術相關原理,本文繼續展開介紹RTK定位原理及誤差解析。目前主流民用衛星定位技術在城市這種復雜場景下的定位精度通常為幾米到幾十米,而實現一些特殊應用的理論定位精度要逼近厘米級。那么該如何實現定位精度數量級的提升?
2023-09-28 09:19:093685 
由于視覺導航技術的應用越來越普及 ,因此 ,有必要對視覺導航中的關鍵技術及應用進行研究。文章對其中的圖像處理技術和定位與跟蹤技術進行了詳細研究 ,并與此相對應 ,介紹的相關的應用。
2023-09-25 08:09:38
機構指出,GNSS/IMU的組合導航系統,可充分發揮GNSS長期高精度性能和IMU短期高精度性能的優勢,為自動駕駛汽車提供連續、高精度和高可靠的位置信息。MEMS IMU作為一個重要的傳感器應用領域
2023-09-20 08:46:54252 電子發燒友網站提供《HPM系列MCU 高精度ADC之誤差分析和設計指南.pdf》資料免費下載
2023-09-19 15:45:340 A:ZPM正在面向高性能大眾市場開發慣性測量單元(IMU)及傳感器。我們申請專利的技術方案結合了MEMS和硅光子學技術來測量加速度和角速率,其噪聲相比傳統的MEMS電容式測量方案低100-10000倍。
2023-09-18 15:32:28294 衛星發射的信號,實現完成定位導航等服務功能。
因為這個芯片關乎到定位的精度與否,而且使用場景也很復雜,這就給其射頻前端提出了很高的要求;其次,又因為這些芯片很多情況下需要應用到由電池供電的移動設備上
2023-09-18 14:14:31
快樂解說MCU:CW32的工作電壓特性
2023-09-18 10:56:25240 ,廣和通將攜手華大北斗在標準精度單雙頻定位、高精度RTK、慣性導航定位等GNSS產品類型上進行合作。融合華大北斗卓越的芯片級高精度定位技術與廣和通模組研發及推廣能力,多款高性能GNSS模組產品將快速
2023-09-13 09:58:17
電子發燒友網站提供《Xilinx:關于PTP精度的最佳平臺.pdf》資料免費下載
2023-09-13 09:28:090 ST的ISM330DLC系統級封裝將3D加速度計和3D陀螺儀相結合,是專為符合工業4.0要求而設計的最新一代高性能6軸MEMS慣性模塊。ISM330DLC具有一流的精度和靈活性以及超低功耗,可滿足
2023-09-13 08:15:12
高精度GNSS定位定向模組M20D結合了全球導航衛星系統(GNSS,如北斗、GPS)和慣性測量單元(IMU)的技術,以實現無人配送車的導航和定位。下面是M20模組實現無人配送車導航定位
2023-09-11 18:01:04470 
慣性導航系統是一種利用慣性測量單元(如加速度計和陀螺儀)來測量和跟蹤物體位置、方向和速度的技術。在無人駕駛領域,慣性導航系統通常與衛星導航系統(如北斗、GPS)結合使用,以提供更高精度和更可靠的定位
2023-09-11 17:56:101271 
應用提供高精度、高靈敏性、低功耗的解決方案。
? 支持所有民用導航衛星系統,支持北斗三號信號體制
? 同時接收 L1、L5 雙頻多模信號
? 顯著提高衛星定位精度至亞米級,優異的抗多徑干擾功能提升城市峽谷中場景下定位表現
? 高集成度表貼模塊,最優性價比高精度定位方案
*附件:TAU1201.pdf
2023-09-11 09:36:56
5月18日,中國衛星導航定位協會在京發布《2023中國衛星導航與位置服務產業發展白皮書》。白皮書顯示,2022年我國衛星導航與位置服務產業總體產值達到5007億元人民幣,較2021年增長6.76
2023-09-11 09:35:53
ALLYSTAR 北斗高精度定位終端是一款支持 5G 通訊、集 GNSS 導航技術、慣性傳感技術于一體的車載智能終端。基于華大北斗自研的全系統多頻低功耗高精度 GNSS 芯片,結合高精度 GNSS
2023-09-08 14:29:58
高端工業級PDA普遍具備高精度的導航定位功能,支持GPS定位信息獲取、GPRS信息傳輸、GIS顯示、GPS導航等。 由于工業級PDA實際作業場景中存在各種干擾源,如電磁干擾、溫度變化等,這些干擾源會對導航定位功能的精度產生負面影響。為保
2023-08-28 11:38:05331 
發射的信號,并通過計算信號傳播時間來確定自身位置。 高精度定位:GNSS導航系統可實現高精度的定位,當使用差分GPS或RTK技術時,定位精度可以達到厘米級別,使得無人機在復雜環境中也能精確飛行和定位。 慣性導航:M20D定向模組集成了慣性導航系統,其中包括陀螺儀和
2023-08-25 17:23:131817 
INS-811是一款高性價比車規級組合導航定位系統,內置集成了戰術級6軸MEMS慣性測量單元和RTK功能的高精度衛星定位模塊,能夠在各種嚴苛環境中實時提供位置、航姿、速度信息,也可以提供加速度
2023-08-24 17:21:35702 
M21 模組基于北云科技新一代 22nm 制程高性能車規級 GNSS SOC 芯片 Alice 研制內置高精度測量引擎、導航引擎、慣性導航單元以及功能安全引擎,符合 ASIL B 功能安全等級,支持
2023-08-23 18:39:19331 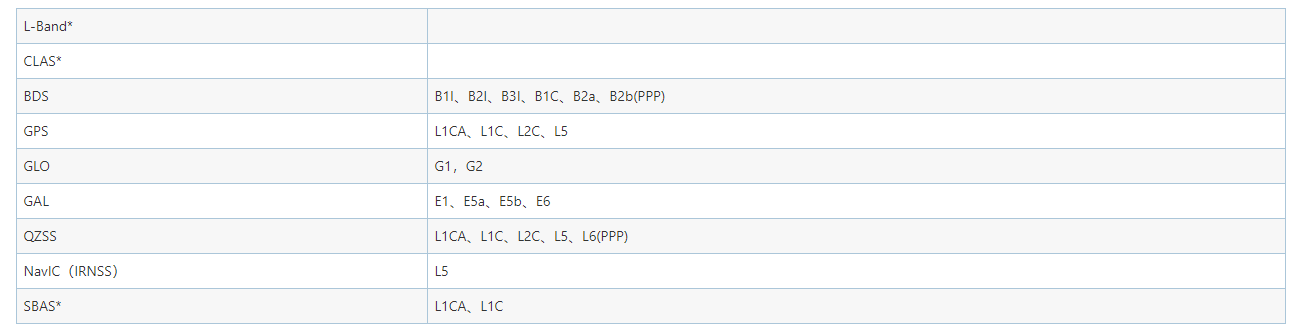
高端工業級PDA普遍具備高精度的導航定位功能,支持GPS定位信息獲取、GPRS信息傳輸、GIS顯示、GPS導航等。
2023-08-23 09:42:18206 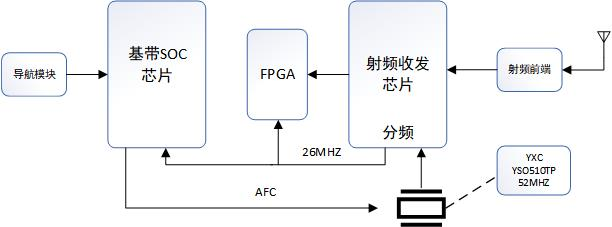
GNSS是一種由多顆衛星組成的導航系統組成,GNSS在無人駕駛中扮演著至關重要的角色。GNSS接收機中高精度定位模組M22,通過接收衛星信號發送精確的定位和時間信號,使得地面接收設備可以準確地確定
2023-08-22 18:20:241570 
慣性導航技術是慣性技術的核心和發展標志,慣性導航系統 (Inertia navigation system,INS) 利用陀螺儀和加速度計 (統稱為慣性儀表) 同時測量載體運動的角速度和線加速度,并通過計算機實時計算出載體的三維姿態、 速度、 位置等導航信息。
2023-08-22 09:56:072984 
時間來確定自身位置。 高精度定位:GNSS導航系統可實現高精度的定位,當使用差分GPS或RTK技術時,定位精度可以達到厘米級別,使得無人機在復雜環境中也能精確飛行和定位。 慣性導航:M20D定向模組集成了慣性導航系統,其中包括陀螺儀和加速度計等傳感器。這些傳
2023-08-21 17:45:05523 
這個陀螺狀的設備叫高級慣性參考球 (AIRS)制導系統,是“和平衛士”洲際彈道導彈導航系統的核心。馬丁·米勒在《大規模殺傷性武器:核時代的幽靈》一書中這樣評價:AIRS重新定義了洲際彈道導彈的精度概念。
2023-08-11 11:21:43386 與慣性導航系統相比, 天文導航系統誤差不隨時間積累, 而與GPS等無線電導航技術相比又不易受到欺騙、干擾和破壞. 目前, 現代天文導航系統主要以星敏感器、紫外月球敏感器和紅外地球敏感器作為
2023-08-10 10:10:531881 
:
1.支持所有民用導航衛星系統,支持北斗三號信號體制(B1C,B2a)
2.同時接收L1、L5雙頻多模信號
3.顯著提高衛星定位精度至亞米級,優異的抗多干擾功能提升城市峽谷仲場景下定位表現
4.高級
2023-08-09 15:30:20
STM32H743VGT6用來測量秒誤差能達到的最高精度是多少。
2023-08-09 07:24:33
本篇文章列出了影響模數轉換精度的主要誤差。這些類型的誤差存在于所有模數轉換器中,轉換質量將取決于它們的消除情況。STM32微控制器數據手冊的ADC特性部分規定了這些誤差 值。規定了STM32 ADC
2023-08-04 10:35:201197 
;精度;誤差所謂加工精度是指零件加工后的幾何參數(尺寸,幾何形狀和相互位置)與理想零件幾何參數相符合的程度,他們之間的偏離程度則為加工誤差。加工誤差的大小反映了加
2023-07-31 22:31:48556 
精度高、定位范圍廣和誤差不隨時間累積等優點,但其自主性差、易受外界遮擋和干擾、接收機數據更新頻率低等缺點。因此工程上常常將兩者互補結合使用,組成衛星/慣性組合導航系統。
2023-07-23 17:17:05652 
MEMS(微機電系統)是指集機械元件、微傳感器、信號處理與控制電路、接口電路、通信和電源為一體的完整的微機電系統。MEMS慣性傳感器可以組成低成本的INS/GPS組合導航系統。它是一種非常適合構建小型捷聯慣導系統的慣性傳感器。MEMS慣性傳感器的突出特性使其在許多民用和軍事領域具有廣闊的應用前景。
2023-07-19 09:21:571286 陀螺儀和加速度計是IMU的主要部件,其精度直接影響慣性系統的精度。在實際工作中,由于各種不可避免的干擾因素,陀螺儀和加速度計會產生誤差。從初始對準開始,其導航誤差隨著時間的推移而增大,尤其是位置誤差
2023-07-14 13:45:421987 關于安全光幕PNP和NPN解說
2023-07-14 10:34:521898 
據麥姆斯咨詢報道,近期,無錫凌思科技有限公司(簡稱:凌思科技)宣布其開發的IMU500高精度汽車級MEMS慣性測量單元(IMU)已開始批量生產。
2023-07-14 10:17:26338 慣性系統是一種自主航位推算導航系統,它利用慣性傳感器、參考方向和初始位置信息來確定載體的方位、位置和速度。它至少應包括一個慣性測量裝置、一臺數字計算機、一個控制顯示裝置和一個專用精密電源。
2023-07-06 15:24:522282 
慣性導航系統(Inertial Navigation System,Ins),顧名思義,是利用慣性定律,來進行位姿推算的導航系統。
2023-07-03 16:23:18455 
定位消除了星鐘誤差,對于在距離基準站1000km的用戶,可以消除星鐘誤差和對流層引起的誤差,因而可以顯著提高動態定位精度。
**GNSS導航優點:**通常用于室外遠距離的跟蹤和制導,其精度取決于衛星在
2023-06-28 09:52:41
等;對表面之間的相互位置而言,就是絕對的平行、垂直、同軸、對稱等。零件實際幾何參數與理想幾何參數的偏離數值稱為加工誤差。 1、簡介 加工精度主要用于生產產品程度,加工精度與加工誤差都是評價加工表面幾何參數的術語。
2023-06-26 15:30:35682 動作捕捉系統的一般性結構主要分為三個部分:數據采集設備、數據傳輸設備、數據處理單元,慣性式動作捕捉系統即是將慣性傳感器應用到數據采集端,數據處理單元通過慣性導航原理對采集到的數據進行處理,從而完成運動目標的姿態角度測量。
2023-06-26 10:17:46694 INS622-2A是一款標準車載組合導航定位系統,內置集成了戰術級6軸MEMS慣性測量單元,具備RTK功能高精度GNSS定位模塊及車載里程計實現組合導航。能夠在各種嚴苛環境中實時提供組合后的位置、航姿、速度信息,也可以提供加速度、角速度等信息。
2023-06-13 16:44:51704 
定位幾大類。其中地圖匹配定位技術利
用道路物理信息與預制高精度地圖,實現實時的自動駕駛定位。在衛星定位、慣性導航系統出現明顯誤差時,地圖匹配定位技
術可為自動駕駛系統提供實時定位修正信息,因此對自動駕駛系統至關重要。
2023-06-07 10:31:550 航空導航技術最大的優點之一是它的精度。這些系統結合了GPS、imu和主機搭載的其它類別的傳感器,以令人難以置信的精度計算出車輛的位置。重要的是,還告訴系統:我們對任何時間點的數據的精度是有多可信耐的。這在自動駕駛汽車中尤為重要,因為即使是很小的位置誤差也可能是災難性的。
2023-06-02 16:32:36322 自動駕駛中,一般用到的導航定位技術包括,慣性導航以及GPS定位導航,慣性導航一般用到IMU,此外為了進一步確保定位
的可信度,還會采集輪速,進行航跡推演,最終實現多重定位的融合。
2023-06-01 16:14:050 ANELLO GNSS慣性導航系統(INS)在GPS拒止環境里可提供長達30分鐘的連續精確的航位推算。
2023-05-29 09:57:05466 
為確保系統滿足所需的精度規范,透徹了解不同的誤差源非常重要。決定信號鏈精度的最關鍵要素之一是A/D 轉換器 (ADC),這是本文的重點。請記住,ADC 的精度可以用絕對精度、相對精度和總未調整誤差 (TUE)來表征。
2023-05-22 11:39:071525 
為確保系統滿足所需的精度規范,透徹了解不同的誤差源非常重要。決定信號鏈精度的最關鍵要素之一是A/D 轉換器 (ADC),這是本文的重點。請記住,ADC 的精度可以用絕對精度、相對精度和總未調整誤差 (TUE)來表征。
2023-05-15 14:06:104338 
、三軸陀螺儀、三軸加速度等;通過在線的自適應組合導航算法,SKG123ND提供實時高精度的車輛定位、測速和測姿信息,在GNSS系統的信號精度降低甚至丟失衛星信號時,不借助里程計信息,SKG123ND利用純慣性導航技術,也可在較長時間內單獨對汽車載體進行高精度定位、測速和測姿。模塊可以直接
2023-04-28 15:30:432 、三軸加速度等;通過在線的自適應組合導航算法,SKM-6DM提供實時高精度的車輛定位、測速和測姿信息,在GNSS系統的信號精度降低甚至丟失衛星信號時,不借助里程計信息,SKM-6DM利用純慣性導航技術,也可在較長時間內單獨對汽車載體進行高精度定位、測速和測姿。模塊可以直接輸出
2023-04-28 15:27:370 陀螺儀是測量角速率的一種器件,是慣性系統的重要組成部分,主要用于導航定位、姿態感知、狀態監測、平臺穩定等應用領域。MEMS陀螺儀的核心是一顆微機械(MEMS)芯片,一顆專用控制電路(ASIC)芯片及應力隔離封裝。
2023-04-28 09:59:135507 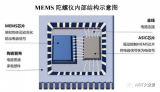
GPS模塊的運行需要接收來自導航衛星的信號,經過處理后反饋到車輛導航儀等設備上,這個過程是設備自行運轉的,人員無法參與其中,因此存在容易造成GPS定位精度不夠的因素。
2023-04-17 15:34:30765 
現在精度最好的imu一個小時會累積幾十米的誤差,價格上百萬美元,用在洲際彈道導彈上的(你老板買得起?)。幾萬美元價位的imu,一分鐘的位置誤差計算下來大概是5米,注意是一分鐘,由于加速度二次積分后,得到的位置與時間是二次關系,即位置誤差隨時間呈拋物線增長。
2023-04-06 10:14:252065 車載導航mcu的作用是控制汽車中的導航系統。作為汽車導航控制系統的核心,導航mcu必須有著耐高溫和堅固的特性,使之在復雜的汽車內部環境中不容易損壞。 汽車mcu有什么作用mcu是Motor
2023-03-27 14:25:34
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論