 電子發(fā)燒友App
電子發(fā)燒友App


多功能模塊化機(jī)器人科教實(shí)訓(xùn)平臺(tái)
一、平臺(tái)簡(jiǎn)介
當(dāng)前機(jī)器人教學(xué)產(chǎn)業(yè)方興未艾,如何提高學(xué)生的學(xué)習(xí)效率?最佳的方式是打通從原理教學(xué)到驗(yàn)證實(shí)踐的快速開(kāi)發(fā)路徑,融合機(jī)器人軟件設(shè)計(jì)、硬件設(shè)計(jì)、算法設(shè)計(jì)、應(yīng)用開(kāi)發(fā)等多個(gè)環(huán)節(jié),實(shí)現(xiàn)一體化開(kāi)發(fā)。多功能模塊化機(jī)器人科研實(shí)訓(xùn)平臺(tái)就是用來(lái)支撐學(xué)生進(jìn)行工業(yè)機(jī)器人的基礎(chǔ)知識(shí)學(xué)習(xí)和示教編程實(shí)操訓(xùn)練的。可以為學(xué)生提供良好的機(jī)器人實(shí)驗(yàn)平臺(tái),為老師提供算法驗(yàn)證的研發(fā)環(huán)境,為學(xué)科建設(shè)提供機(jī)器人專業(yè)綜合解決方案。
1.1現(xiàn)狀分析
l 智能制造工程專業(yè):本專業(yè)培養(yǎng)具備掌握機(jī)械、自動(dòng)化、智能化等智能制造相關(guān)學(xué)科基礎(chǔ)知識(shí)及應(yīng)用能力,能夠從事智能產(chǎn)品設(shè)計(jì)制造,智能裝備故障診斷、維護(hù)維修,智能工廠系統(tǒng)運(yùn)行、管理及系統(tǒng)集成等方面工作的高素質(zhì)應(yīng)用型工程技術(shù)人才。
l 機(jī)器人工程專業(yè): 機(jī)器人工程是一個(gè)多維交叉,多學(xué)科融合的新學(xué)科,與各種專業(yè)都有關(guān)聯(lián)。機(jī)器人的結(jié)構(gòu)部分需要機(jī)械專業(yè)來(lái)完成,內(nèi)部電路涉及電氣等專業(yè),運(yùn)動(dòng)系統(tǒng)控制和感知規(guī)劃又與控制專業(yè)有關(guān),智能感知、決策方面又涉及計(jì)算機(jī)、人工智能專業(yè)知識(shí),同時(shí)材料科學(xué)、力學(xué)等專業(yè)也與機(jī)器人工程息息相關(guān)而機(jī)器人工程專業(yè)的多維交叉性又恰逢目前國(guó)內(nèi)自動(dòng)化與智能汽車及其他相關(guān)“新四化”領(lǐng)域人才展需求。
如何在師資,場(chǎng)地、資金有限的條件下,設(shè)計(jì)、實(shí)施滿足多學(xué)科交叉融合、軟件化、數(shù)字化等趨勢(shì)需求的智能制造人才綜合實(shí)訓(xùn)平臺(tái)還是有相當(dāng)難度的。
1.2設(shè)計(jì)思想
l 針對(duì)融合化趨勢(shì):需要打通感知、控制、 智能決策等多個(gè)環(huán)節(jié);
l 針對(duì)軟件化趨勢(shì):新工科專業(yè)學(xué)生都應(yīng)該具有一定的軟件編程訓(xùn)練;
l 針對(duì)數(shù)字化趨勢(shì):應(yīng)該具有一定的系統(tǒng)建模、仿真和三維呈現(xiàn)能力。
綜合實(shí)訓(xùn)系統(tǒng)應(yīng)該能在三個(gè)層級(jí)配合教學(xué)過(guò)程實(shí)現(xiàn)遞進(jìn)式的培養(yǎng)。
層級(jí)一是認(rèn)知和使用層面的“知其然”,可以分階段的了解和學(xué)習(xí)工業(yè)機(jī)器人和智能制造系統(tǒng)的使用過(guò)程。
層級(jí)二是理論體系建立層面的“知其所以然”,可以了解與自己探索與使用過(guò)程相關(guān)的底層原理和技術(shù)試驗(yàn)方法。
層級(jí)三是面向未來(lái)需求的“創(chuàng)未然”,創(chuàng)造尚未出現(xiàn)的機(jī)器人與智能制造系統(tǒng)。
1.3關(guān)鍵技術(shù)
中國(guó)科學(xué)院沈陽(yáng)自動(dòng)化研究所(簡(jiǎn)稱“沈自所”)作為長(zhǎng)期從事機(jī)器人技術(shù)的專業(yè)研究所,不斷研發(fā)出新的智能機(jī)器人成果、擁有專業(yè)的科研團(tuán)隊(duì)和完整的國(guó)家級(jí)平臺(tái)資源。面向機(jī)器人人才培育主戰(zhàn)場(chǎng),深入推動(dòng)機(jī)器人技術(shù)產(chǎn)業(yè)化應(yīng)用是我所積極響應(yīng)國(guó)策倡導(dǎo),推動(dòng)產(chǎn)學(xué)研結(jié)合帶動(dòng)自身發(fā)展,促進(jìn)支柱產(chǎn)業(yè)協(xié)同創(chuàng)新升級(jí),引導(dǎo)培育新型教學(xué)裝備產(chǎn)業(yè)的必然之路。
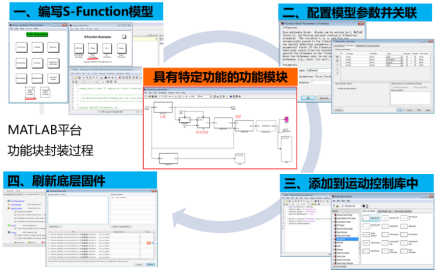
沈自所研發(fā)的開(kāi)放式機(jī)器人控制系統(tǒng),通過(guò)MATLAB自動(dòng)代碼生成方式實(shí)現(xiàn)一體化關(guān)節(jié)、機(jī)器人運(yùn)動(dòng)控制、機(jī)器人力位混合控制、機(jī)器人視覺(jué)集成、機(jī)器人人工智能等多層次實(shí)驗(yàn)環(huán)境,打通了機(jī)器人算法仿真到真機(jī)部署的全流程。
為了加速機(jī)器人應(yīng)用型的人才培養(yǎng),沈自所致力于打造機(jī)器人教學(xué)生態(tài),整合國(guó)內(nèi)機(jī)器人科研研發(fā)力量,面向國(guó)內(nèi)高校,整個(gè)系統(tǒng)內(nèi)部深度開(kāi)發(fā),助理機(jī)器人與智能制造相關(guān)專業(yè)的平臺(tái)建設(shè)。
二、平臺(tái)特點(diǎn)
多功能模塊化機(jī)器人科教實(shí)訓(xùn)平臺(tái)以六或七自由度機(jī)械臂為被控對(duì)象,覆蓋了主流工業(yè)機(jī)器人品牌,包括ABB、KUKA、UR、珞石、Aubo等。采用模塊化設(shè)計(jì)理念,具備理實(shí)一體、虛實(shí)結(jié)合、開(kāi)源開(kāi)放、易學(xué)易用等特點(diǎn),極大的提高師生的參與程度,為實(shí)驗(yàn)室建設(shè)提供多用途、層次豐富、省空間、安全易用、開(kāi)放可升級(jí)的綜合實(shí)訓(xùn)系統(tǒng)。
2.1理實(shí)一體
平臺(tái)以機(jī)器人原理教學(xué)為基礎(chǔ),包括機(jī)器人建模、運(yùn)動(dòng)學(xué)、動(dòng)力學(xué)等內(nèi)容,通過(guò)算法開(kāi)發(fā)、仿真實(shí)驗(yàn)、真機(jī)實(shí)驗(yàn)等過(guò)程,加深理論與實(shí)踐相結(jié)合的學(xué)習(xí)。以實(shí)操訓(xùn)練平臺(tái)為擴(kuò)展,支持搬運(yùn)、打磨、碼垛等工藝,以項(xiàng)目開(kāi)發(fā)為驅(qū)動(dòng),強(qiáng)化平臺(tái)的實(shí)踐性和實(shí)用性。使學(xué)生達(dá)到理論聯(lián)系實(shí)際、活學(xué)活用的培養(yǎng)目標(biāo),提升其實(shí)際應(yīng)用技能。
2.2虛實(shí)結(jié)合
支持在不啟動(dòng)操作臂的情況下進(jìn)行算法的離線仿真驗(yàn)證。支持虛擬機(jī)器人顯示,保證了控制效果的可觀察。
2.3開(kāi)源開(kāi)放
在機(jī)器人可視化集成開(kāi)發(fā)環(huán)境中,通過(guò)抽象化通訊協(xié)議模型,統(tǒng)一控制代碼與物理仿真的軟件模型,在機(jī)器人系統(tǒng)設(shè)計(jì)層面隱藏不必要的細(xì)節(jié),實(shí)現(xiàn)機(jī)器人系統(tǒng)應(yīng)用的一體化建模與管理。用戶可以開(kāi)發(fā)自定義模型庫(kù),用于機(jī)器人相關(guān)算法的積累。
針對(duì)開(kāi)發(fā)的深度不同,提供了不同層級(jí)的開(kāi)發(fā),滿足不同層次的開(kāi)發(fā)需求。深度開(kāi)放,滿足定制化開(kāi)發(fā)。
對(duì)于不同構(gòu)型和自由度的操作臂具有統(tǒng)一的操作接口。僅需要通過(guò)簡(jiǎn)單的配置即可實(shí)現(xiàn)不同種類操作臂的快速適配。
2.4易學(xué)易用
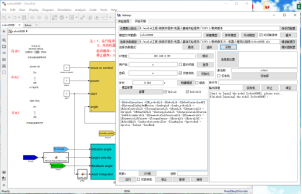
Matlab/Simulink下建立的動(dòng)態(tài)系統(tǒng)數(shù)學(xué)模型應(yīng)用于實(shí)時(shí)仿真、算法測(cè)試,便于全流程控制和局部算法驗(yàn)證。
高度集成的機(jī)器人編譯環(huán)境保證了模型的可靠性、準(zhǔn)確度及更小的仿真步長(zhǎng),提高了模型運(yùn)算速度和控制精度。
涵蓋機(jī)器人基礎(chǔ)理論和高級(jí)控制算法庫(kù),集成多種總線通訊模塊,建立運(yùn)動(dòng)學(xué)、動(dòng)力學(xué)模型,兼具視覺(jué)、力覺(jué)等處理能力。
三、平臺(tái)組成與功能介紹
3.1總體構(gòu)成
多功能模塊化科教實(shí)訓(xùn)平分為三個(gè)柜體組成,分別是:主機(jī)臺(tái)、程控臺(tái)、氣動(dòng)臺(tái)。總體尺寸為1500*1200*900,程控臺(tái)和氣動(dòng)臺(tái)尺寸都為400*1200,主機(jī)臺(tái)尺寸為700*1200。
3.2模塊化機(jī)架
三個(gè)分別為獨(dú)立主體,可根據(jù)用戶提供定制化方案,單個(gè)主機(jī)臺(tái)可做原理科研教學(xué),三個(gè)柜體合并在一起既可做實(shí)訓(xùn)又可做原理科研教學(xué)還可以拆分成產(chǎn)線,滿足學(xué)校定制化開(kāi)發(fā)的需求。
主機(jī)臺(tái)主要放置原理教學(xué)模塊:
1、機(jī)器人;2、機(jī)器人快速原型控制器;3、相機(jī);4、六維力傳感器;5、遙操作手柄;6、平面軌跡/立體軌跡模塊;7、標(biāo)定座模塊;8、氣動(dòng)模塊等。
程控臺(tái)主要放置實(shí)訓(xùn)教學(xué)模塊:
1、PCL模塊;2、傳送到模塊;3、碼垛模塊;4、井式供料模塊;5、光柵模塊等。
氣動(dòng)臺(tái)主要放置實(shí)訓(xùn)教學(xué)模塊:
1、靜態(tài)立庫(kù)模塊;2、打磨模塊;3、書寫模塊;3、光柵模塊等。
3.3 工業(yè)機(jī)器人
珞石x系列機(jī)器臂 XB7
產(chǎn)品基本參數(shù)
| 自由度: | 6 | 本體質(zhì)量: | 約50Kg | 儲(chǔ)藏溫度: | ﹣10°C/+55°C |
| 手腕負(fù)載: | 7Kg | 防護(hù)等級(jí): | IP54(IP67可選) | 環(huán)境溫度: | 0°C/+40°C |
| 最大工作半徑: | 707mm | 噪音水平: | ≤70dB(A) |
? |
? |
| 運(yùn)動(dòng)參數(shù) | 軸 | 運(yùn)動(dòng)范圍 | 最大速度 | ||
| 軸1 | ±170° | 440°/s | |||
| 軸2 | ﹣135°/﹣90° | 355°/s | |||
| 軸3 | ﹢65°C/﹣195°C | 440°/s | |||
| 軸4 | ±170° | 480°/s | |||
| 軸5 | ±120° | 450°/s | |||
| 軸6 | ±360° | 705°/s |
3.4機(jī)器人快速原型控制器
機(jī)器人快速原型控制器包括通信模塊、運(yùn)動(dòng)控制模塊和安全模塊,實(shí)現(xiàn)多種構(gòu)型機(jī)器人控制。可以快速搭建機(jī)器人研究或應(yīng)用平臺(tái),支持機(jī)器人控制算法驗(yàn)證及機(jī)器人應(yīng)用的快速開(kāi)發(fā)。
特征優(yōu)勢(shì)
l 統(tǒng)一的操作接口、僅需要簡(jiǎn)單的配置即可實(shí)現(xiàn)快速適配;
l 支持多機(jī)器人協(xié)同作業(yè),支持工業(yè)OPC-UA通信;
l 運(yùn)動(dòng)控制支持CIA402協(xié)議,支持通用構(gòu)型的運(yùn)動(dòng)控制;
l 安全模塊包括支持分布式時(shí)鐘、支持冗余、支持熱插拔和支持運(yùn)動(dòng)狀態(tài)檢測(cè)等。
機(jī)器人模型庫(kù)
l 機(jī)器人單軸控制庫(kù)
l 機(jī)器人接口庫(kù)
l 機(jī)器人基礎(chǔ)控制庫(kù)
l 機(jī)器人3D顯示庫(kù)
l 傳感器接口庫(kù)
l 末端執(zhí)行器接口庫(kù)

被控對(duì)象示例
? 實(shí)現(xiàn)自主控制的多種被控對(duì)象,包括工業(yè)機(jī)器人、無(wú)人機(jī)、倒立擺系統(tǒng)。
? 多種不同構(gòu)型機(jī)器人的控制,協(xié)作7軸機(jī)器人、雙臂機(jī)器人、并聯(lián)機(jī)器人等。
? 支持c、c++、Matlab等多種語(yǔ)言開(kāi)發(fā),兼容通信、視覺(jué)、力覺(jué)等傳感器處理功能。
3.5實(shí)訓(xùn)模塊
(可根據(jù)用戶需求進(jìn)行針對(duì)性選擇或定制)
四、實(shí)驗(yàn)與支撐課程
4.1機(jī)器人原理教學(xué)
基礎(chǔ)實(shí)驗(yàn):
| 序號(hào) | 實(shí)驗(yàn)名稱 | 課程內(nèi)容 |
| 1 | 機(jī)器人系統(tǒng)認(rèn)識(shí) | 了解機(jī)器人系統(tǒng)的基本組成,培養(yǎng)學(xué)生理論聯(lián)系實(shí)際的能力。 |
| 2 | 機(jī)器人空間位姿描述 | 認(rèn)識(shí)機(jī)器人位置與姿態(tài)的描述方式,了解多種姿態(tài)的描述方法 |
| 3 | 建立連桿坐標(biāo)系及D-H參數(shù) | 學(xué)習(xí)機(jī)器人連桿坐標(biāo)系的建立,學(xué)習(xí)修正D-H參數(shù)的建立方法 |
| 4 | 機(jī)器人正運(yùn)動(dòng)學(xué) | 學(xué)習(xí)連桿變換,學(xué)習(xí)建立機(jī)器人的正運(yùn)動(dòng)學(xué)方程 |
| 5 | 機(jī)器人逆運(yùn)動(dòng)學(xué) | 解逆解相關(guān)的基本概念,如:多解性,奇異問(wèn)題等,學(xué)習(xí)建立機(jī)器人的逆運(yùn)動(dòng)學(xué)模型。 |
| 6 | 機(jī)器人關(guān)節(jié)空間規(guī)劃 |
了解多種規(guī)劃方法,了解關(guān)節(jié)空間規(guī)劃特點(diǎn) ,學(xué)習(xí)在關(guān)節(jié)空間實(shí)現(xiàn)機(jī)器人運(yùn)動(dòng)軌跡的規(guī)劃 |
| 7 | 機(jī)器人笛卡爾空間規(guī)劃 | 了解笛卡爾空間規(guī)劃特點(diǎn),學(xué)習(xí)笛卡爾空間直線規(guī)劃方法 |
| 8 | 機(jī)器人雅可比矩陣 | 了解雅可比矩陣及作用,學(xué)習(xí)雅可比矩陣的推導(dǎo)方法 |
| 9 | 機(jī)器人動(dòng)力學(xué) | 了解動(dòng)力學(xué)模型的描述形式及作用,學(xué)習(xí)動(dòng)力學(xué)模型的推導(dǎo)方法 |
| 10 | 機(jī)器人動(dòng)力學(xué)參數(shù)辨識(shí) | 了解動(dòng)力辨識(shí)的目的,學(xué)習(xí)動(dòng)力學(xué)辨識(shí)方法 |
| 11 | 機(jī)器人的拖動(dòng)示教 | 學(xué)習(xí)拖動(dòng)示教算法,學(xué)習(xí)利用拖動(dòng)示教算法實(shí)現(xiàn)機(jī)器人的控制 |
| 12 | 基于末端力矩傳感器的拖動(dòng)示教實(shí)驗(yàn) | 學(xué)習(xí)基于末端力矩傳感器的拖動(dòng)示教算法,學(xué)習(xí)基于末端力矩傳感器的拖動(dòng)示教算法實(shí)現(xiàn) |
高級(jí)實(shí)驗(yàn):
| 序號(hào) | 實(shí)驗(yàn)名稱 | 課程內(nèi)容 |
| 1 | 機(jī)器人的PID控制 | 學(xué)習(xí)PID控制方法,學(xué)習(xí)利用PID實(shí)現(xiàn)機(jī)器人的控制 |
| 2 | 機(jī)器人的動(dòng)力學(xué)前饋控制 | 學(xué)習(xí)動(dòng)力學(xué)前饋控制算法,學(xué)習(xí)利用動(dòng)力學(xué)前饋控制算法實(shí)現(xiàn)機(jī)器人的控制 |
| 3 | 機(jī)器人的拖動(dòng)示教 | 學(xué)習(xí)拖動(dòng)示教算法,學(xué)習(xí)利用拖動(dòng)示教算法實(shí)現(xiàn)機(jī)器人的控制 |
| 4 | 基于末端力矩傳感器的拖動(dòng)示教實(shí)驗(yàn) | 學(xué)習(xí)基于末端力矩傳感器的拖動(dòng)示教算法,學(xué)習(xí)基于末端力矩傳感器的拖動(dòng)示教算法實(shí)現(xiàn) |
| 5 | 基于末端力矩傳感器的導(dǎo)納控制實(shí)驗(yàn) | 學(xué)習(xí)基于末端力矩傳感器的阻抗控制方法,學(xué)習(xí)基于末端力矩傳感器的阻抗控制方法方法實(shí)現(xiàn)。 |
4.2機(jī)器人實(shí)訓(xùn)教學(xué)(選配)
| 序號(hào) | 實(shí)驗(yàn)名稱 | 課程內(nèi)容 |
| 1 | 工業(yè)機(jī)器人認(rèn)知 | 了解工業(yè)機(jī)器人的工作原理、系統(tǒng)組成及基本功能、掌握工業(yè)機(jī)器人的性能指標(biāo) |
| 2 | 工業(yè)機(jī)器人的基本操作 | 掌握工業(yè)機(jī)器人示教器、以及在不同坐標(biāo)軸下的基本操作 |
| 3 | 機(jī)器人軌跡規(guī)劃編程實(shí)驗(yàn) | 通過(guò)示教器編寫相應(yīng)代碼,實(shí)現(xiàn)工業(yè)機(jī)器人軌跡規(guī)劃。 |
| 4 | 機(jī)器人書寫編程與操作 | 學(xué)習(xí)并掌握機(jī)械G代碼,通過(guò)G代碼編程輸入到示教器中,讓機(jī)器人能夠書寫 |
| 5 | 視覺(jué)檢測(cè)編程與操作 | 學(xué)習(xí)視覺(jué)檢測(cè)系統(tǒng)程序改寫與改參,檢測(cè)出實(shí)際工況所物體。 |
| 6 | 機(jī)器人搬運(yùn)編程與操作 | 通過(guò)示教器編寫相應(yīng)代碼,加上相應(yīng)模塊,實(shí)現(xiàn)工業(yè)機(jī)器人搬運(yùn)。 |
| 7 | 機(jī)器人碼垛編程與操作 | 通過(guò)示教器編寫相應(yīng)代碼,加上相應(yīng)模塊,實(shí)現(xiàn)工業(yè)機(jī)器人碼垛。 |
| 8 | 機(jī)器人打磨編程與操作 | 通過(guò)示教器編寫相應(yīng)代碼,加上相應(yīng)模塊,實(shí)現(xiàn)工業(yè)機(jī)器人打磨。 |
| 9 | 機(jī)器人離線編程實(shí)驗(yàn) | 學(xué)習(xí)離線編程程序,可以實(shí)時(shí)進(jìn)行仿真相關(guān)實(shí)驗(yàn) |
4.3機(jī)器人視覺(jué)教學(xué)
| 序號(hào) | 實(shí)驗(yàn)名稱 | 課程內(nèi)容 |
| 1 | 機(jī)器人視覺(jué)認(rèn)識(shí) | 認(rèn)識(shí)機(jī)器人視覺(jué),了解機(jī)器人視覺(jué)任務(wù)需求 |
| 2 | 機(jī)器人視覺(jué)相機(jī)標(biāo)定 | 學(xué)習(xí)二維及三維相機(jī)圖像的數(shù)據(jù)獲取,學(xué)習(xí)相機(jī)的標(biāo)定 |
| 3 | 機(jī)器人視覺(jué)對(duì)象識(shí)別及坐標(biāo)系轉(zhuǎn)換 | 通過(guò)圖像處理方法找到圖像中的物體,學(xué)習(xí)圖像坐標(biāo)系到世界坐標(biāo)系的變換的實(shí)現(xiàn) |
| 4 | 機(jī)器人視覺(jué)手眼標(biāo)定 | 學(xué)習(xí)機(jī)器人的手眼標(biāo)定方法,學(xué)習(xí)機(jī)器人的手眼標(biāo)定方法的實(shí)現(xiàn) |
| 5 | 機(jī)器人視覺(jué)引導(dǎo)抓取 | 學(xué)習(xí)機(jī)器人視覺(jué)引導(dǎo)的原理,學(xué)習(xí)機(jī)器人視覺(jué)應(yīng)用搭建 |
4.4機(jī)器人科研創(chuàng)新
(1)機(jī)器人下棋
有兩臺(tái)工業(yè)機(jī)器人和一個(gè)棋盤組成組成,通過(guò)下棋博弈系統(tǒng),由下棋AI測(cè)試與相機(jī)視覺(jué)感知、棋盤態(tài)勢(shì)識(shí)別、以及機(jī)器人運(yùn)動(dòng)控制共同進(jìn)行實(shí)現(xiàn)機(jī)器人對(duì)弈下棋操作。也可在V-rep進(jìn)行虛擬仿真實(shí)驗(yàn)。
(2)機(jī)器人打乒乓球
通過(guò)視覺(jué)系統(tǒng)及人工智能算法基于機(jī)器人打球的權(quán)利。不論是教學(xué)或是訓(xùn)練都能提供可量化的表現(xiàn),通過(guò)調(diào)參可以給出針對(duì)性的訓(xùn)練方案以及科研參數(shù)供給用戶去學(xué)習(xí)以及使用,將學(xué)習(xí)與訓(xùn)練提高效率。
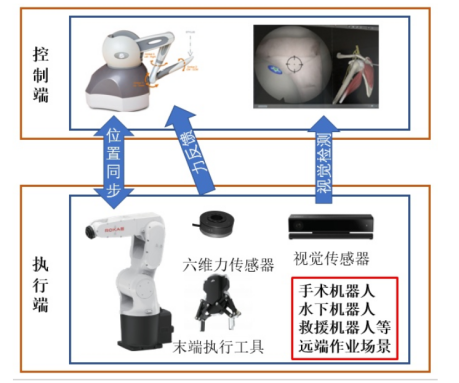
(3)遙操作
“遠(yuǎn)程控制”工業(yè)機(jī)器人,通過(guò)多軸手柄來(lái)實(shí)現(xiàn)機(jī)器人操作。
·能夠進(jìn)行快速力反饋設(shè)備(主)及機(jī)器人(從)信息交互;
·精確的進(jìn)行主從設(shè)備位置、速度、力的相互轉(zhuǎn)換:基于運(yùn)動(dòng)學(xué)及動(dòng)力學(xué)辨識(shí)補(bǔ)償實(shí)現(xiàn)。
·結(jié)合人工智能+視覺(jué):搭建以智能硬件為依托,智能感知為輔助,智能控制為核心的新型遙操作機(jī)器人拓展思路。
?
(4)亂序抓取
將數(shù)量較多的工件無(wú)序地放在料框里面,經(jīng)過(guò)視覺(jué)識(shí)別,要快速識(shí)別無(wú)序工件,提高工作效率。
通過(guò)三維結(jié)構(gòu)光面掃描技術(shù),可以識(shí)別無(wú)序工件的位置,智能引導(dǎo)機(jī)器人定位抓取。抓取是工業(yè)機(jī)器人應(yīng)用的一個(gè)大方向,而之前線激光或者二維視覺(jué)引導(dǎo)抓取,有著自身的局限性。未來(lái)在更多場(chǎng)景下可以選用三維面視覺(jué)技術(shù)解決抓取難題。
(5)曲面打磨
通過(guò)末端打磨頭可實(shí)現(xiàn)全姿態(tài)力/位混合控制補(bǔ)償,適用任意外形工件的表面處理,并保證接觸力精確與穩(wěn)定,適配多種大型工業(yè)機(jī)器人。
審核編輯:湯梓紅















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論