CAN總線(xiàn)和基于CAN總線(xiàn)的診斷完全不是一個(gè)概念,CAN總線(xiàn)的硬件也不一定是OBD的硬件。至于“多去4S店問(wèn)問(wèn)技師,車(chē)廠(chǎng)的人大部分的人都不一定比這些人懂的多”,你讓這些技師給我寫(xiě)個(gè)能用的ECU CAN接口出來(lái)?
2016-01-27 09:58:16 14871
14871 CAN-bus起源于汽車(chē)總線(xiàn),目前被廣泛應(yīng)用于環(huán)境復(fù)雜的工業(yè)現(xiàn)場(chǎng),因此必要的總線(xiàn)防護(hù)是主板及設(shè)備安全的重要保障。今天我們聊一聊CAN總線(xiàn)防雷防護(hù)設(shè)計(jì)。
2017-09-11 15:25:2834735 
CAN-bus起源于汽車(chē)總線(xiàn),目前被廣泛應(yīng)用于環(huán)境復(fù)雜的工業(yè)現(xiàn)場(chǎng),因此必要的總線(xiàn)防護(hù)是主板及設(shè)備安全的重要保障。今天這里跟說(shuō)一說(shuō)CAN總線(xiàn)防雷防護(hù)設(shè)計(jì)。
2017-09-15 07:12:005710 
在ISO 11898-2和ISO 11898-3中分別規(guī)定了兩種CAN總線(xiàn)結(jié)構(gòu)(在BOSCH CAN2.0規(guī)范中,并沒(méi)有關(guān)于總線(xiàn)拓?fù)浣Y(jié)構(gòu)的說(shuō)明):高速CAN總線(xiàn)和低速CAN總線(xiàn),區(qū)別表如下所示。
2023-04-07 09:30:181836 
在很多的CAN總線(xiàn)介紹的文章中說(shuō)明:CAN總線(xiàn)最多支持掛接的設(shè)備(如下圖中展示的CAN Device的數(shù)量最大值)是110個(gè)。但是可能很多人并不清楚為何是110?“110”這個(gè)數(shù)字是怎么來(lái)的?
2023-08-28 09:56:024250 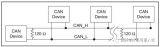
這意味著變送器通過(guò)CAN收發(fā)器改變總線(xiàn)電平,并將其信息傳輸?shù)?b class="flag-6" style="color: red">CAN總線(xiàn)。接收器通過(guò)監(jiān)測(cè)總線(xiàn)電平將總線(xiàn)上的信息讀取到自己的CAN收發(fā)器中。
2024-02-19 14:53:54606 
現(xiàn)場(chǎng)總線(xiàn)VS工業(yè)以太網(wǎng)現(xiàn)場(chǎng)總線(xiàn)CAN總線(xiàn)(Control Area Network)一、CAN總線(xiàn)是什么?CAN總線(xiàn)的作用?CAN總線(xiàn)的優(yōu)點(diǎn)CAN總線(xiàn)拓?fù)鋱D各接口協(xié)議速率對(duì)比
2021-08-06 07:44:19
CAN總線(xiàn)的仲裁是基于“線(xiàn)與原理(有一個(gè)0則為0,全部為1才為1)”,也即,總線(xiàn)上連接多個(gè)設(shè)備,只要有一個(gè)設(shè)備輸出低電平,那么總線(xiàn)上的電平就為低(這一現(xiàn)象在CAN領(lǐng)域稱(chēng)為“顯性”);只有全部設(shè)備均
2022-01-19 06:57:59
前言CAN總線(xiàn)的應(yīng)用在現(xiàn)在看來(lái)越來(lái)越廣泛,我廠(chǎng)設(shè)備從最初的ARM9與ARM7平臺(tái)、期間升級(jí)過(guò)度到CortexA8與Cortex M3平臺(tái),再到現(xiàn)在的Cortex M4平臺(tái),圍繞CAN進(jìn)行了一系列
2021-07-27 06:18:35
總線(xiàn)系統(tǒng)設(shè)計(jì)奠定基礎(chǔ)。第4—9章重點(diǎn)講解CAN總線(xiàn)系統(tǒng)硬件設(shè)計(jì)和程序設(shè)計(jì),以幫助讀者熟悉該系統(tǒng)的硬件資源,也是單片機(jī)學(xué)習(xí)者很好的學(xué)習(xí)范例;同時(shí)給出CAN總線(xiàn)自發(fā)收、兩點(diǎn)通信、多點(diǎn)通信、CAN
2014-12-30 16:01:59
屬于現(xiàn)場(chǎng)總線(xiàn)的范疇,它是一種有效支持分布式控制或?qū)崟r(shí)控制的串行通信網(wǎng)絡(luò)。在這個(gè)網(wǎng)絡(luò)中的各種硬件設(shè)備之間不可避免的需要實(shí)現(xiàn)數(shù)據(jù)傳輸,以實(shí)現(xiàn)產(chǎn)品的功用。適應(yīng)技術(shù)具體要求,CAN總線(xiàn)透明傳輸通訊模塊誕生
2011-09-24 11:57:56
CAN現(xiàn)場(chǎng)總線(xiàn)只定義了OSI網(wǎng)絡(luò)模型的第一層(物理層) 和第二層(數(shù)據(jù)鏈路層) ,而這兩層一般已被CAN硬件完全實(shí)現(xiàn)了。由于沒(méi)有規(guī)定應(yīng)用層,本身并不完整,需要一個(gè)高層協(xié)議來(lái)定義CAN報(bào)文中的11
2021-09-09 09:11:37
統(tǒng)由上位監(jiān)控PC機(jī)、智能節(jié)點(diǎn)和現(xiàn)場(chǎng)設(shè)備三部分組成。上位監(jiān)控PC機(jī)主要負(fù)責(zé)對(duì)系統(tǒng)數(shù)據(jù)的接受與管理、控制命令的發(fā)送以及各控制單元?jiǎng)討B(tài)參數(shù)和設(shè)備狀態(tài)的實(shí)時(shí)顯示;智能節(jié)點(diǎn)可以使現(xiàn)場(chǎng)設(shè)備方便地連接到CAN總線(xiàn)上,主要
2016-11-06 17:00:51
節(jié)點(diǎn)的操作不受影響。CAN 總線(xiàn)卓越的特性、極高的可靠性和獨(dú)特的設(shè)計(jì),特別適合工業(yè)過(guò)程中監(jiān)控設(shè)備的互連,因此,越來(lái)越受到工業(yè)界的重視,并被公認(rèn)為是最有前途的現(xiàn)場(chǎng)總線(xiàn)之一。另外,CAN 總線(xiàn)協(xié)議已被
2018-12-13 14:26:31
該系統(tǒng)的硬件構(gòu)成、芯片選擇和組成原理, 對(duì)FPGA的控制程序進(jìn)行了分析和設(shè)計(jì); 實(shí)驗(yàn)結(jié)果表明, 系統(tǒng)完全滿(mǎn)足CAN總線(xiàn)通信要求, 與以往基于單片機(jī)的CAN總線(xiàn)通信系統(tǒng)相比較, 降低了體積、重量和功耗, 具有優(yōu)越性; 該設(shè)計(jì)已成功應(yīng)用于星載電場(chǎng)儀的地面檢測(cè)設(shè)備中。
2012-08-11 11:55:19
在工業(yè)自動(dòng)化現(xiàn)場(chǎng)我們一直使用筆記本電腦調(diào)試設(shè)備。隨著智能手機(jī)的發(fā)展,使用智能手機(jī)連接CAN總線(xiàn)設(shè)備進(jìn)行調(diào)試和監(jiān)控,成為了可能。如何實(shí)現(xiàn)CAN總線(xiàn)設(shè)備與手機(jī)的連接呢?我們使用的智能手機(jī)都有WiFi接口
2016-07-22 15:25:57
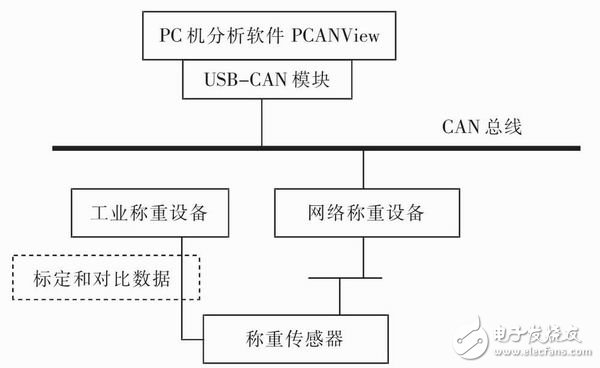
采用具有24位∑-△型A/D轉(zhuǎn)換器的系統(tǒng)級(jí)單片機(jī)MSC1210結(jié)合低成本的供電解決方案與CAN控制器SJA1000以及CAN總線(xiàn)收發(fā)器82C250,設(shè)計(jì)一種具有CAN總線(xiàn)接口的24位稱(chēng)重數(shù)據(jù)采集系統(tǒng),可應(yīng)用于組合稱(chēng)重設(shè)備、選別設(shè)備。
2021-04-14 06:15:25
在工業(yè)稱(chēng)重設(shè)備中,通常情況下,我們需要把稱(chēng)重傳感器輸出的模擬信號(hào)轉(zhuǎn)成數(shù)字信號(hào),然后通過(guò)PLC或電腦軟件讀取數(shù)字信號(hào)再進(jìn)行邏輯處理,進(jìn)一步控制機(jī)械。那么該如何選擇一款合適的稱(chēng)重AD模塊(重量變送器)呢?要想達(dá)到產(chǎn)品質(zhì)量要求,3個(gè)指標(biāo)非常關(guān)鍵:精度,采樣速率,及穩(wěn)定性。精度
2019-07-05 07:04:22
若有從事稱(chēng)重設(shè)備行業(yè)的工程師,希望能能給我一些幫助,目前我再開(kāi)發(fā)一個(gè)稱(chēng)重設(shè)備在模數(shù)采集部分的穩(wěn)定性不是很理想,還有就是軟件濾波方面沒(méi)有太好的方法,若有從事稱(chēng)重行業(yè)的工程師可以留下聯(lián)系方式,我與你聯(lián)系;
2018-09-02 21:52:00
控制器局域網(wǎng)(CAN)是現(xiàn)代汽車(chē)網(wǎng)絡(luò)通信與控制系統(tǒng)中的重要組成部分,《汽車(chē)CAN總線(xiàn)系統(tǒng)原理、設(shè)計(jì)與應(yīng)用》全面、系統(tǒng)地介紹了汽車(chē)CAN總線(xiàn)的基本原理、應(yīng)用層協(xié)議制定、系統(tǒng)軟件和硬件設(shè)計(jì),并且通過(guò)實(shí)例
2018-04-09 22:27:02
自己用HX711做了稱(chēng)重設(shè)備怎么不顯示?麻煩各位大神幫忙看看謝謝程序如下[code]#include#include#include#include#define uchar unsigned
2015-04-07 12:17:07
介紹CAN 總線(xiàn)及其通信協(xié)議J1939, 并設(shè)計(jì)基于CAN 總線(xiàn)的多ECU 通信平臺(tái)的硬件結(jié)構(gòu); 闡述節(jié)點(diǎn)ECU 通信的軟件設(shè)計(jì)方法,在仿真試驗(yàn)的條件下實(shí)現(xiàn)數(shù)據(jù)通信的功能。試驗(yàn)表明該平臺(tái)運(yùn)行
2009-04-15 09:49:53 22
22 介紹一種以8051 微控制器和82527 獨(dú)立CAN 總線(xiàn)控制器為核心組成的CAN 總線(xiàn)智能傳感器節(jié)點(diǎn)的設(shè)計(jì)方法, 并給出其硬件原理圖和初始化程序。
2009-05-14 15:59:5414 介紹CAN 總線(xiàn)及其通信協(xié)議J1939, 并設(shè)計(jì)基于CAN 總線(xiàn)的多ECU 通信平臺(tái)的硬件結(jié)構(gòu); 闡述節(jié)點(diǎn)ECU 通信的軟件設(shè)計(jì)方法,在仿真試驗(yàn)的條件下實(shí)現(xiàn)數(shù)據(jù)通信的功能。試驗(yàn)表明該平臺(tái)運(yùn)行
2009-05-16 14:19:0828 CAN 總線(xiàn)作為一種現(xiàn)場(chǎng)總線(xiàn),應(yīng)用極為普及。本文給出了一種基于AT89C51 和SJA1000 的CAN 總線(xiàn)節(jié)點(diǎn)設(shè)計(jì)方法,并對(duì)軟硬件進(jìn)行了相應(yīng)的說(shuō)明。關(guān)鍵詞:CAN 總線(xiàn),SJA1000,單片機(jī)CAN(C
2009-05-25 13:26:1259 CAN總線(xiàn)具有配置靈活、應(yīng)用范圍廣的特點(diǎn),C8051f040單片機(jī)功能強(qiáng)大,集成了CAN總線(xiàn)控制器。本文提出了一種基于C8051f040的CAN總線(xiàn)系統(tǒng)智能節(jié)點(diǎn)的設(shè)計(jì)方案,給出了相應(yīng)的硬件和軟件
2009-06-17 11:18:4723 本文研究 CAN 總線(xiàn)在電梯串行通訊中的應(yīng)用。論文對(duì)比RS-485 通訊方式,分析CAN 總線(xiàn)應(yīng)用于電梯串行通訊中的優(yōu)點(diǎn),采用SJA1000 設(shè)計(jì)了CAN 總線(xiàn)通訊硬件,優(yōu)化CAN總線(xiàn)的通信參數(shù),提高
2009-06-25 13:28:0327 本設(shè)計(jì)為光電穩(wěn)定跟蹤平臺(tái)開(kāi)發(fā)CAN 驅(qū)動(dòng),以實(shí)現(xiàn)CAN 總線(xiàn)上設(shè)備間的通信。分析了linux 下標(biāo)準(zhǔn)設(shè)備驅(qū)動(dòng)機(jī)制和CAN 總線(xiàn)通信模型,給出了光電穩(wěn)定跟蹤平臺(tái)中CAN 總線(xiàn)通信的硬件設(shè)計(jì)
2009-08-04 08:33:4830 針對(duì)CAN 總線(xiàn)技術(shù)應(yīng)用的蓬勃發(fā)展,本文設(shè)計(jì)了一種基于CAN 總線(xiàn)的工程設(shè)備控制系統(tǒng),對(duì)總線(xiàn)通訊協(xié)議進(jìn)行了設(shè)計(jì)研究,介紹了基于CAN 總線(xiàn)技術(shù)的作業(yè)控制終端、作業(yè)控制器、虛擬
2009-09-03 10:14:0216 針對(duì)紡織生產(chǎn)過(guò)程中清紗機(jī)的工作特點(diǎn),提出了一種基于CAN總線(xiàn)技術(shù)的控制系統(tǒng)設(shè)計(jì)方法,分析了系統(tǒng)的工作原理、網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)及其硬件構(gòu)成,詳細(xì)闡述了CAN總線(xiàn)的網(wǎng)絡(luò)接口方法
2009-11-01 09:33:1413 CAN總線(xiàn)是一種應(yīng)用極為普及的現(xiàn)場(chǎng)總線(xiàn)。文中提出了一種CAN總線(xiàn)通信接口的設(shè)計(jì)方案。CAN總線(xiàn)智能節(jié)點(diǎn)用單片機(jī)AT89S52和SJA1000控制器為核心組成。分別從硬件電路設(shè)計(jì)和SJA1000軟件
2010-01-25 15:04:2251 基于CAN-bus 總線(xiàn)的海關(guān)車(chē)場(chǎng)設(shè)備網(wǎng)方案
CAN-bus 總線(xiàn)介紹CAN-bus 是國(guó)際上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線(xiàn)之一,被廣泛應(yīng)用于歐洲的中高檔汽車(chē)中,用作ECU 單元的
2010-03-22 15:44:2834 基于CAN總線(xiàn)的機(jī)場(chǎng)目視著陸燈光引導(dǎo)設(shè)備
介紹基于CAN總線(xiàn)的新一代機(jī)場(chǎng)目視著陸燈光引導(dǎo)設(shè)備的組成和工作原理,同時(shí)給出具體的硬件設(shè)計(jì)和現(xiàn)場(chǎng)應(yīng)用。關(guān)
2010-03-23 16:32:1522 通用型CAN總線(xiàn)設(shè)計(jì)和開(kāi)發(fā)
介紹了采用PHILIP公司生產(chǎn)的控制器局域網(wǎng)的高度集成的通信控制器SJA1000和82C250作為收發(fā)器的CAN總線(xiàn)接口電路的硬件設(shè)計(jì)方法,介紹了
2010-06-09 15:13:2950 介紹了基于通用無(wú)線(xiàn)分組業(yè)務(wù)(GPRS)的遠(yuǎn)程稱(chēng)重數(shù)據(jù)采集系統(tǒng)的工作原理和軟硬件實(shí)現(xiàn)方法,該系統(tǒng)可以將稱(chēng)重設(shè)備采集到的重量數(shù)據(jù)和儀表狀態(tài)通過(guò)GPRS網(wǎng)絡(luò)上傳到遠(yuǎn)程服務(wù)器,實(shí)
2010-12-22 17:01:0823 ?摘要:介紹了一種用單片機(jī)ADμC812、CAN總線(xiàn)控制器SJA1000和CAN總線(xiàn)驅(qū)動(dòng)器POA82C250組成的CAN總線(xiàn)智能節(jié)點(diǎn)的設(shè)計(jì)方案,給出了該節(jié)點(diǎn)的硬件結(jié)構(gòu)和軟件設(shè)計(jì)方法,同時(shí)介紹
2006-03-11 11:47:39949 
摘要:介紹CAN總線(xiàn)及其通信協(xié)議J1939,并設(shè)計(jì)基于CAN總線(xiàn)的多ECN通信平臺(tái)的硬件結(jié)構(gòu);闡述節(jié)點(diǎn)ECN通信的軟件設(shè)計(jì)方法,在仿真試驗(yàn)的條件下實(shí)現(xiàn)數(shù)
2006-03-11 13:21:031634 
基于CAN總線(xiàn)的RS-232串口設(shè)備遠(yuǎn)程通信
闡述了CAN總線(xiàn)在232串口設(shè)備遠(yuǎn)程通信或自組網(wǎng)絡(luò)中的應(yīng)用,介紹了CAN到RS-232轉(zhuǎn)換裝置的軟硬件設(shè)計(jì)方法。重點(diǎn)
2009-09-27 16:07:381337 
基于CAN總線(xiàn)的變頻設(shè)備遠(yuǎn)程監(jiān)控系統(tǒng)的實(shí)現(xiàn)
CAN總線(xiàn)介紹:
CAN總線(xiàn)有以下特點(diǎn):
2009-10-10 08:56:30665 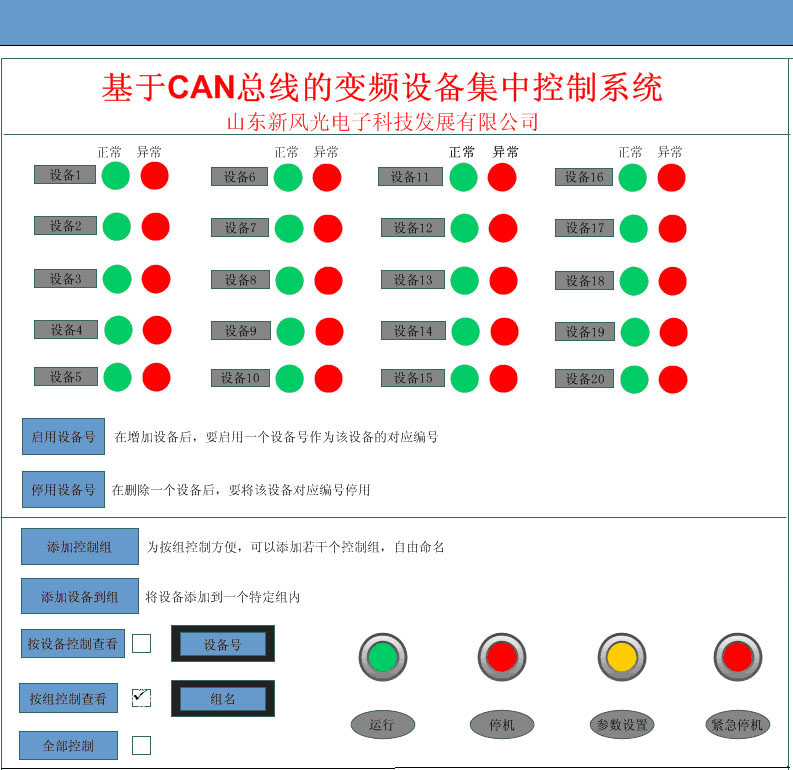
CAN總線(xiàn)通信硬件原理圖(采用TJA1050T CAN總線(xiàn)驅(qū)動(dòng)器)
F040中內(nèi)置CAN總線(xiàn)協(xié)議控制器,只要外接總線(xiàn)驅(qū)動(dòng)芯片和適當(dāng)?shù)目垢蓴_電路就可以很方便地建立一
2009-11-13 12:18:1432972 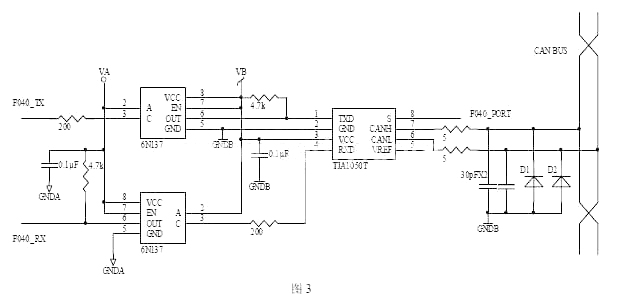
文章對(duì) CAN總線(xiàn) 的技術(shù)特點(diǎn)進(jìn)行了全面介紹,對(duì)CAN總線(xiàn)在磁浮列車(chē)的應(yīng)用方法進(jìn)行了分析,對(duì)CAN總線(xiàn)的軟、硬件進(jìn)行了設(shè)計(jì),最后就磁懸浮列車(chē)CAN總線(xiàn)通訊網(wǎng)進(jìn)行了論述。
2011-07-22 18:05:2046 CAN-485B是RS85總線(xiàn)與CAN總線(xiàn)智能型轉(zhuǎn)換器,用于RS485端口的設(shè)備與CAN設(shè)備之間或RS485網(wǎng)絡(luò)與CAN網(wǎng)絡(luò)之間的通訊 。CAN-485B硬件采用高速微處理器設(shè)計(jì),軟件采用高效優(yōu)化的算法,幀轉(zhuǎn)換采用存
2011-09-22 16:02:3256 本文首先介紹PCI總線(xiàn)控制器PCI9052與CAN總線(xiàn)通信控制器SJA1000的工作原理,并且介紹了PCI總線(xiàn)和CAN總線(xiàn)通信控制器接口的硬件和軟件實(shí)現(xiàn)方法。
2011-09-23 17:34:221938 
本文介紹了CAN 總線(xiàn)的主要性能及特點(diǎn),CAN 總線(xiàn)在實(shí)際工業(yè)應(yīng)用中的總體結(jié)構(gòu),同時(shí)給出了CAN 總線(xiàn)協(xié)議轉(zhuǎn)換器的硬件設(shè)計(jì)方法和通信協(xié)議。主要研究了CAN 總線(xiàn)接口電路設(shè)計(jì),把所設(shè)計(jì)的
2011-10-31 15:01:47463 文中分析了CAN總線(xiàn)的發(fā)展和汽車(chē)CAN總線(xiàn)技術(shù)的特征,對(duì)CAN總線(xiàn)在汽車(chē)領(lǐng)域的應(yīng)用進(jìn)行了深入的探討。
2011-12-14 14:58:1084 基于CAN總線(xiàn)系統(tǒng)結(jié)構(gòu)構(gòu)成,通過(guò)工程實(shí)踐的具體應(yīng)用以及對(duì)CAN控制器及收發(fā)器硬件結(jié)構(gòu)的深入理解,并從通信的角度出發(fā)著重深入分析了CAN總線(xiàn)通信的節(jié)點(diǎn)同步機(jī)制、總線(xiàn)地址機(jī)制、總
2012-05-08 15:23:04404 系統(tǒng)設(shè)計(jì)奠定基礎(chǔ)。第4—9章重點(diǎn)講解CAN總線(xiàn)系統(tǒng)硬件設(shè)計(jì)和程序設(shè)計(jì),同時(shí)給出CAN總線(xiàn)自發(fā)收、兩點(diǎn)通信、多點(diǎn)通信、CAN—RS232網(wǎng)橋、溫控系統(tǒng)等綜合實(shí)例,讓讀者在學(xué)習(xí)和實(shí)踐中理解CAN總線(xiàn)的精髓。
2016-04-05 11:17:2318 系統(tǒng)設(shè)計(jì)奠定基礎(chǔ)。第4—9章重點(diǎn)講解CAN總線(xiàn)系統(tǒng)硬件設(shè)計(jì)和程序設(shè)計(jì),同時(shí)給出CAN總線(xiàn)自發(fā)收、兩點(diǎn)通信、多點(diǎn)通信、CAN—RS232網(wǎng)橋、溫控系統(tǒng)等綜合實(shí)例,讓讀者在學(xué)習(xí)和實(shí)踐中理解CAN總線(xiàn)的精髓。
2016-04-05 11:18:2021 一篇關(guān)于CAN總線(xiàn)接口電路硬件設(shè)計(jì)的文檔,很詳細(xì),可以參考下
2016-07-01 16:45:4998 微處理器,設(shè)計(jì)一個(gè)用于氣體監(jiān)測(cè)的CAN總線(xiàn)網(wǎng)絡(luò),給出了基本CAN 節(jié)點(diǎn)的硬件原理圖和程序流程圖,闡述CAN 總線(xiàn)調(diào)試過(guò)程一些細(xì)節(jié)和經(jīng)驗(yàn)。
2016-10-11 15:35:0134 在本系統(tǒng)中,紫金橋軟件主要實(shí)現(xiàn)實(shí)時(shí)稱(chēng)重數(shù)據(jù)的記錄、統(tǒng)計(jì)稱(chēng)重數(shù)據(jù)、顯示當(dāng)前稱(chēng)重的各項(xiàng)數(shù)據(jù)及稱(chēng)重設(shè)備運(yùn)行狀態(tài)的監(jiān)控等功能;
2017-10-13 10:16:545 CAN已經(jīng)形成國(guó)際標(biāo)準(zhǔn),并已被公認(rèn)為幾種最有前途的現(xiàn)場(chǎng)總線(xiàn)之一。CAN 總線(xiàn)的數(shù)據(jù)通信具有突出的可靠性、實(shí)時(shí)性和靈活性。由于其良好的性能及獨(dú)特的設(shè)計(jì),CAN總線(xiàn)越來(lái)越受到人們的重視,它在汽車(chē)領(lǐng)域上的應(yīng)用是最廣泛的。接下來(lái)及跟隨小編一起來(lái)了解一下CAN總線(xiàn)的工作原理、特點(diǎn)及優(yōu)缺點(diǎn)、應(yīng)用領(lǐng)域及應(yīng)用案例吧。
2018-05-07 10:36:3933700 
根據(jù)CAN 總線(xiàn)的特性, 給出了基于Cort ex-M3 內(nèi)核的LM3S2965 芯片中CAN 總線(xiàn)節(jié)點(diǎn)的硬件電路、軟件實(shí)現(xiàn)框架及部分代碼。初始化代碼部分可以直接應(yīng)用在其他CAN 總線(xiàn)的接口設(shè)計(jì)中。
2018-05-09 08:42:2822 前言 CAN總線(xiàn)的應(yīng)用在現(xiàn)在看來(lái)越來(lái)越廣泛,我廠(chǎng)設(shè)備從最初的ARM9與ARM7平臺(tái)、期間升級(jí)過(guò)度到CortexA8與Cortex M3平臺(tái),再到現(xiàn)在的Cortex M4平臺(tái),圍繞CAN進(jìn)行了一系列
2018-06-13 11:16:18332802 CAN(controller area network)控制器局域網(wǎng)絡(luò)是一種實(shí)時(shí)性強(qiáng)、靈活性好、標(biāo)準(zhǔn)化程度高的串行數(shù)據(jù)總線(xiàn),廣泛應(yīng)用于汽車(chē)電子、工業(yè)自動(dòng)化、船舶、醫(yī)療設(shè)備、工業(yè)設(shè)備等領(lǐng)域。其測(cè)試設(shè)備
2018-11-15 08:02:003179 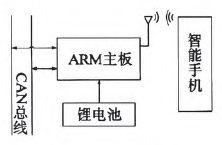
本文在分析CAN總線(xiàn)航天應(yīng)用的基礎(chǔ)上,從硬件原理設(shè)計(jì)、CPU與CAN總線(xiàn)接口實(shí)現(xiàn)以及CAN總線(xiàn)通信軟件設(shè)計(jì)等方面進(jìn)行了論述。
2019-11-19 07:45:002736 本文說(shuō)的CAN即是一種總線(xiàn),也是一種協(xié)議。因此,我們常聽(tīng)見(jiàn)CAN總線(xiàn),也常聽(tīng)見(jiàn)CAN協(xié)議。CAN協(xié)議和CANOpen協(xié)議是兩套不同的協(xié)議。從軟硬件層次來(lái)劃分,CAN協(xié)議屬于硬件協(xié)議,而CANOpen
2018-10-03 19:53:0073332 
想要實(shí)現(xiàn)CAN總線(xiàn)數(shù)據(jù)的存儲(chǔ)和回放,可以選擇CAN總線(xiàn)數(shù)據(jù)存儲(chǔ)設(shè)備。GCAN-401是一種可以離線(xiàn)脫機(jī)工作并可以將所有CAN總線(xiàn)上的原始數(shù)據(jù)實(shí)時(shí)保存到存儲(chǔ)卡中的設(shè)備。
2019-02-20 14:16:403465 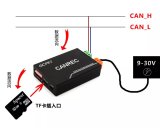
廣成科技GCAN-30X系列模塊是一系列定制型的CANopen轉(zhuǎn)換模塊,該模塊是在CAN總線(xiàn)網(wǎng)關(guān)轉(zhuǎn)換器設(shè)備的基礎(chǔ)上在CAN總線(xiàn)端增加了CANopen通信協(xié)議,從而將原本使用RS232/485、以太網(wǎng)
2019-03-02 11:06:497649 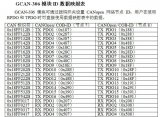
CAN協(xié)議教程 介紹:CAN總線(xiàn) CAN總線(xiàn)是廣播類(lèi)型的總線(xiàn)。這意味著所有節(jié)點(diǎn)都可以偵聽(tīng)到所有傳輸?shù)膱?bào)文。無(wú)法將報(bào)文單獨(dú)發(fā)送給指定節(jié)點(diǎn);所有節(jié)點(diǎn)都將始終捕獲所有報(bào)文。但是,CAN硬件能夠提供本地過(guò)濾
2020-04-03 15:32:2213499 本文在分析can總線(xiàn)航天應(yīng)用的基礎(chǔ)上,從硬件原理設(shè)計(jì)、cpu與can總線(xiàn)接口實(shí)現(xiàn)以及can總線(xiàn)通信軟件設(shè)計(jì)等方面進(jìn)行了論述。
2020-04-02 09:53:062836 
工業(yè)生產(chǎn)過(guò)程稱(chēng)重--智能工業(yè)稱(chēng)重設(shè)備的應(yīng)用:稱(chēng)重管理用于是生產(chǎn)過(guò)程一個(gè)必不可少的環(huán)節(jié),任何一件產(chǎn)品在生產(chǎn)過(guò)程總脫離不了稱(chēng)重,稱(chēng)重隨著需求的不斷提高也在不斷變化。一直以來(lái),生產(chǎn)線(xiàn)稱(chēng)重管理工作,都是
2020-07-03 16:30:231361 can總線(xiàn)模塊是一個(gè)比較模糊的概念,但凡是和CAN總線(xiàn)沾邊,應(yīng)用CAN總線(xiàn)進(jìn)行通訊的設(shè)備,我們其實(shí)都可以稱(chēng)其為CAN總線(xiàn)模塊。
2020-09-18 11:26:544694 CAN總線(xiàn)在硬件系統(tǒng)中占有一席之地,國(guó)際上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線(xiàn)之一,與我們講過(guò)的SPI、UART不同,屬于“高端高效”系列。很多小伙伴希望我們講講CAN總線(xiàn),今天就來(lái)了。
2020-10-30 10:57:024343 CAN總線(xiàn)在硬件系統(tǒng)中占有一席之地,國(guó)際上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線(xiàn)之一,與我們講過(guò)的SPI、UART不同,屬于“高端高效”系列。
2020-12-09 10:41:393457 采用NXP公司的Cortex-M3處理器作為CAN總線(xiàn)的發(fā)送端,并以ZLG公司的PCI9820I CAN卡作為CAN總線(xiàn)的接收端測(cè)試數(shù)據(jù)的傳輸。重點(diǎn)介紹闡述了系統(tǒng)硬件和軟件的設(shè)計(jì)方法。系統(tǒng)可靠地實(shí)現(xiàn)了CAN通信。
2021-04-19 16:55:0241 基于WINCE的CAN總線(xiàn)設(shè)備驅(qū)動(dòng)研究說(shuō)明。
2021-04-20 09:36:536 以MSCAN08和MSCAN12為示例,講述CAN現(xiàn)場(chǎng)總線(xiàn),初步掌握CAN總線(xiàn)技術(shù)的應(yīng)用。
2021-04-20 16:12:35287 總線(xiàn)是當(dāng)今自動(dòng)化領(lǐng)域技術(shù)發(fā)展的熱點(diǎn)之一,被譽(yù)為自動(dòng)化領(lǐng)域的計(jì)算機(jī)局域網(wǎng)。 一般工程師們都知道在汽車(chē)中大部分都會(huì)用到CAN總線(xiàn),其實(shí)還有許多的船艦電子設(shè)備通信也會(huì)用到CAN總線(xiàn),現(xiàn)在CAN總線(xiàn)的適用范圍越來(lái)越廣泛。 CAN總線(xiàn)的優(yōu)勢(shì)是網(wǎng)絡(luò)各節(jié)點(diǎn)之間的數(shù)據(jù)通信實(shí)時(shí)性強(qiáng)、開(kāi)發(fā)
2021-08-07 16:37:1317486 1. CAN是什么CAN 是 Controller Area Network 的縮寫(xiě)(以下稱(chēng)為 CAN),是 ISO*1 國(guó)際標(biāo)準(zhǔn)化的串行通信協(xié)議。在當(dāng)前的汽車(chē)產(chǎn)業(yè)中,出于對(duì)安全性、舒適性、方便性
2021-11-05 18:35:5911 can wifi轉(zhuǎn)換器是一種CAN總線(xiàn)網(wǎng)關(guān)工具。什么是網(wǎng)關(guān)工具?說(shuō)人話(huà)就是數(shù)據(jù)轉(zhuǎn)換器,CAN WiFi轉(zhuǎn)換器就是實(shí)現(xiàn)CAN總線(xiàn)數(shù)據(jù)與WiFi數(shù)據(jù)之間轉(zhuǎn)換的設(shè)備,它可能長(zhǎng)成下面這個(gè)樣子
2021-12-21 15:07:521891 很多的司機(jī)朋友以及工控圈的朋友都有聽(tīng)到過(guò)“CAN總線(xiàn)”一詞,今天我們就來(lái)一起看一下CAN總線(xiàn)為什么這么火? CAN總線(xiàn),也叫做控制器局域網(wǎng)總線(xiàn)(Controller Area Network
2022-01-15 17:04:485782 canbus光纖轉(zhuǎn)換器是一種CAN總線(xiàn)網(wǎng)關(guān),也就是實(shí)現(xiàn)CAN總線(xiàn)數(shù)據(jù)與其他數(shù)據(jù)之間相互轉(zhuǎn)換的工具。為什么工程師們要開(kāi)發(fā)這個(gè)東西呢?因?yàn)?b class="flag-6" style="color: red">CAN總線(xiàn)在某些方面不太夠用,因此CAN轉(zhuǎn)光纖轉(zhuǎn)換器應(yīng)運(yùn)而生。注意,這個(gè)設(shè)備的核心的CAN轉(zhuǎn)換,而不是光纖,一切的一切都是為CAN總線(xiàn)服務(wù)的。
2022-03-01 13:22:204046 大家好,我是小麥。最近在調(diào)試一個(gè)CAN總線(xiàn)的設(shè)備時(shí)遇到了一些問(wèn)題,在此簡(jiǎn)單總結(jié)一下。本文將對(duì)CAN總線(xiàn)進(jìn)行簡(jiǎn)單介紹,包括CAN的硬件鏈路層、協(xié)議層,以及調(diào)試的一些心得。
2022-03-12 10:06:0914130 需要人為的延長(zhǎng)CAN總線(xiàn)的通訊距離,這就是CAN數(shù)據(jù)中繼的原因。那么,我們?cè)谶M(jìn)行CAN硬件中繼時(shí),該選擇哪一個(gè)設(shè)備呢?下面簡(jiǎn)單的來(lái)說(shuō)說(shuō)。
2022-03-16 13:26:51948 以太網(wǎng)轉(zhuǎn)can模塊能夠讓以太網(wǎng)總線(xiàn)上的設(shè)備與CAN總線(xiàn)上的設(shè)備互發(fā)信息,協(xié)同使用,是一種常用的CAN數(shù)據(jù)轉(zhuǎn)換器。那么,它應(yīng)該如何連接使用呢?我們簡(jiǎn)單的聊聊。
2022-06-20 09:22:577464 高速CAN總線(xiàn)上為顯性電平(邏輯0)時(shí),CAN_H為3.5V、CAN_L為1.5V,此時(shí)電壓差是2V,顯性狀態(tài)的CAN總線(xiàn)電壓范圍。
高速CAN總線(xiàn)上為隱性電平(邏輯1)時(shí),CAN_H和CAN_L都為2.5V,此時(shí)電壓差就是0V,隱性狀態(tài)的CAN總線(xiàn)電壓范圍。
2022-09-13 16:57:223631 CAN總線(xiàn)是硬件實(shí)現(xiàn),編程時(shí)只要設(shè)置相關(guān)的參數(shù)即可.目前在車(chē)載通訊和工業(yè)通訊都使用的比較多.
2023-02-07 09:57:492179 機(jī)械設(shè)備進(jìn)行稱(chēng)重和填充的,取代傳統(tǒng)人工分揀,杜絕因傳統(tǒng)人工弊端所帶來(lái)的問(wèn)題,大大降低了人工成本。那么使用機(jī)械自動(dòng)稱(chēng)重和填充就一定令人安心嗎?我們都知道,萬(wàn)事沒(méi)有絕對(duì)
2023-02-06 09:57:52385 
點(diǎn)擊關(guān)注,電磁兼容不迷路。什么是CAN總線(xiàn)CAN總線(xiàn)是一種廣泛用于汽車(chē)、工業(yè)自動(dòng)化和其他領(lǐng)域的串行通信協(xié)議。它允許多個(gè)設(shè)備共享通信線(xiàn)路,傳輸數(shù)據(jù)以及控制信號(hào)。CAN總線(xiàn)有兩個(gè)不同的版本
2023-04-21 09:42:31639 
由于好多現(xiàn)場(chǎng)會(huì)出現(xiàn)將CAN總線(xiàn)的設(shè)備接到EtherCAT網(wǎng)絡(luò)中,由于協(xié)議的不相同,不能直接進(jìn)行連接,現(xiàn)需一種能同時(shí)兼容CAN 總線(xiàn)和ETHERCAT網(wǎng)絡(luò)的一種設(shè)備,由此遠(yuǎn)創(chuàng)智控YC-ECT-CAN
2023-07-06 09:55:58514 
由于好多現(xiàn)場(chǎng)會(huì)出現(xiàn)將CAN總線(xiàn)的設(shè)備接到EtherCAT網(wǎng)絡(luò)中,由于協(xié)議的不相同,不能直接進(jìn)行連接,現(xiàn)需一種能同時(shí)兼容CAN 總線(xiàn)和ETHERCAT網(wǎng)絡(luò)的一種設(shè)備,由此捷米JM-ECT-CAN
2023-10-31 18:30:00437 
認(rèn)識(shí)CAN 總線(xiàn)錯(cuò)誤的第一步就是了解認(rèn)識(shí)CAN 總線(xiàn)協(xié)議和它的具體功能,這樣才能更容易地理解CAN 總線(xiàn)是如何去發(fā)現(xiàn)并解決錯(cuò)誤的。
2023-08-14 15:18:463228 
can總線(xiàn)負(fù)載率多少合理? CAN總線(xiàn)是一種控制器區(qū)域網(wǎng)絡(luò),它是用于在不同設(shè)備之間進(jìn)行通信的技術(shù)。CAN總線(xiàn)的應(yīng)用領(lǐng)域廣泛,例如汽車(chē)、航空航天、醫(yī)學(xué)儀器等。在CAN總線(xiàn)中,數(shù)據(jù)通過(guò)網(wǎng)絡(luò)傳輸,并且在
2023-09-07 15:05:412173 can總線(xiàn)為什么要用雙絞線(xiàn)?can總線(xiàn)不用雙絞線(xiàn)可以嗎? CAN總線(xiàn)是一種數(shù)據(jù)通信協(xié)議,廣泛用于汽車(chē)、航空、船舶、工業(yè)自動(dòng)化、機(jī)器人等領(lǐng)域。CAN總線(xiàn)采用串行通信方式,主要用于實(shí)現(xiàn)多個(gè)模塊之間的通信
2023-09-14 16:48:053603 PCAN-MiniDiagFD是一款用于CAN和CANFD總線(xiàn)基本診斷的手持式診斷儀,它易于攜帶、成本低廉。工程師和開(kāi)發(fā)者們可以輕易地用它接入汽車(chē)、機(jī)械或者工業(yè)設(shè)備的總線(xiàn)網(wǎng)絡(luò)。對(duì)于不清楚總線(xiàn)配置
2021-11-11 09:33:500 差分傳輸,為了避免信號(hào)的反射和干擾,還需要在CAN_H和CAN_L之間接上120歐姆的終端電阻。 每一個(gè)設(shè)備既可做主設(shè)備也可做從設(shè)備。CAN總線(xiàn)的通信距離可達(dá)10千米(速率低于5Kbps),速度可達(dá)1Mbps(通信距離小于40M)。 CAN電平邏輯 CAN總線(xiàn)采用”線(xiàn)與”的規(guī)則進(jìn)行總線(xiàn)沖裁,
2023-11-09 18:11:50657 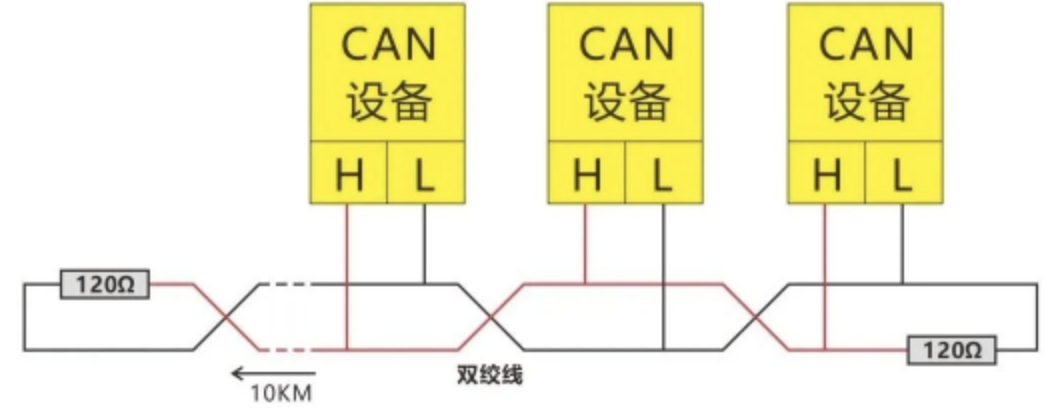
便會(huì)報(bào)廢,造成嚴(yán)重的物料浪費(fèi)與經(jīng)濟(jì)損失。 在制藥廠(chǎng)的生產(chǎn)工作中,稱(chēng)重設(shè)備可能受到周?chē)h(huán)境、設(shè)備工作狀態(tài)及其他因素的影響,而出現(xiàn)多裝、少裝、超重、欠重等問(wèn)題,同時(shí)如果設(shè)備出現(xiàn)故障沒(méi)有得到及時(shí)維護(hù),就會(huì)影響到整
2023-11-13 14:05:01211 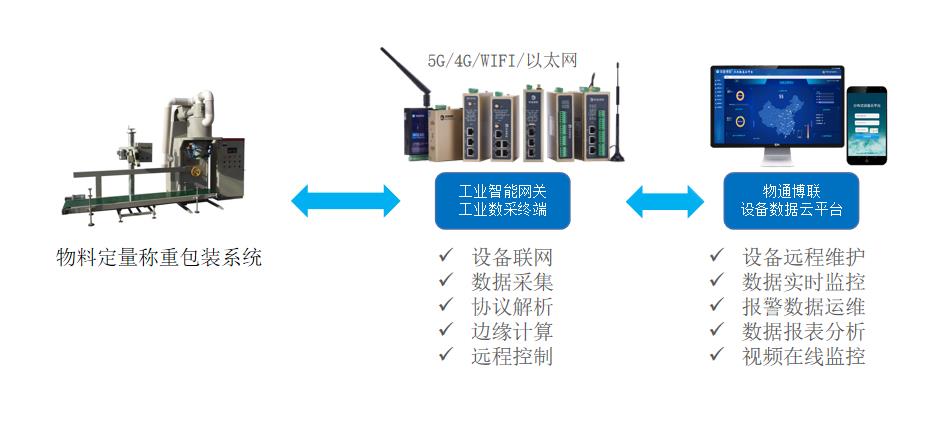
CAN總線(xiàn)通訊協(xié)議由德國(guó)博世于上世紀(jì)80年代發(fā)明,第一個(gè)使用CAN總線(xiàn)通訊協(xié)議的量產(chǎn)車(chē)型是1991年的奔馳S級(jí)轎車(chē),至今CAN總線(xiàn)依舊是車(chē)內(nèi)主要的通訊總線(xiàn)。隨著汽車(chē)電子智能化加速,CAN總線(xiàn)也開(kāi)始
2023-12-21 14:03:45663 
CAN總線(xiàn)共模電感是應(yīng)用于CAN總線(xiàn)通信中的一種電子元件,用于解決CAN總線(xiàn)通信中的共模干擾問(wèn)題。本文將詳細(xì)介紹CAN總線(xiàn)共模電感的定義、作用、選型要點(diǎn)以及常見(jiàn)注意事項(xiàng),并且結(jié)合實(shí)際案例進(jìn)行分析
2024-01-05 13:42:34748 高速CAN總線(xiàn)和低速CAN總線(xiàn)的特性 高速CAN總線(xiàn)和低速CAN總線(xiàn)是兩種常見(jiàn)的CAN總線(xiàn)類(lèi)型。它們?cè)跀?shù)據(jù)傳輸速率、最大電纜長(zhǎng)度、適用場(chǎng)景等方面存在一些差異。下面將詳盡、詳實(shí)、細(xì)致地介紹這兩種CAN
2024-01-31 14:09:01497
 電子發(fā)燒友App
電子發(fā)燒友App















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論