完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
標簽 > 激光雷達
激光雷達最大的優點在于它能直接提供距離信息。平常我們看到的照片或者視頻是一個平面,這是XY二維空間,但是駕駛員最關心是距離,即Z坐標,這就屬于三維。
文章:3888個 瀏覽:192330次 帖子:82個
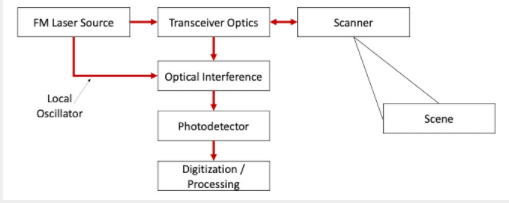
相干檢測的“魔力”早已在國防部圈子中得到認可。然而,幾十年來,密集的信號處理將實際應用限制為昂貴的防御程序或緩慢的離線應用程序。所需的數據吞吐量和處...
高級駕駛員輔助系統(ADAS)TDA2x SoC的前置攝像頭應用介紹
用于高級駕駛員輔助系統(ADAS)的TDA2x SoC第4課第2部分-前置攝像頭應用
由USHR為凱迪拉克制作的激光雷達地圖專為高速公路無人駕駛設計,地圖的內容包括車道數量、車道寬度、水平寬度、速度上限、速度下限、海拔高度、順坡斜率、邊坡...
LIDAR系統的簡化框圖如圖2所示。從多維激光傳輸的光 光束從入射物體反射回來,并使用光電探測器(或雪崩光電二極管)進行檢測。這 檢波器的輸出電流使用T...
這是山特維克公司最新的宣傳片,片中的車輛是山特維克LH514無人駕駛、礦用卸載的挖掘機,重量為38.1噸,允許載重52.1噸。它由沃爾沃的12.78升直...
本篇在gazebo中搭建可以模擬產生livox_camera_lidar_calibration功能包需要的數據的仿真場景.
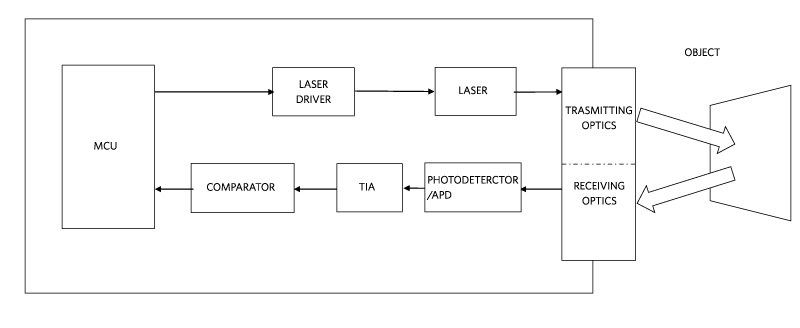
TOF測距激光雷達的工作原理:通過電機帶動旋轉,將激光脈沖不斷投射到障礙物同時接收反射回的激光脈沖,將光速與飛行時間差相乘,求得雷達到相應障礙物的距離。
基于MEMS技術的微型光束操縱器件有望實現更輕、更低成本的激光雷達
“機器人和無人機是絕對可能的應用領域,”Gylfason說,“目前的激光雷達系統對于自動駕駛汽車而言成本過于高昂,而汽車產業對成本非常敏感。其他可能的應...
激光雷達的硬件模塊有哪些? 車載激光雷達的發展階段有哪些? 目前,車載激光雷達的物體探測方式有哪些?
SC-Depth系列的網絡都解決了什么問題以及實現了什么效果
深度估計其實是一個非常早的問題,早期方法主要是Structure from Motion (SfM)和Multi View Stereo (MVS)這兩種。
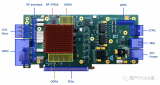
CSA-2T6R采用一顆全新的國產RF-FPGA芯片。該芯片采用FinFET工藝,將通用FPGA邏輯資源與多通道高速ADC/DAC片上集成在一起,可以滿...
據麥姆斯咨詢報道,3D傳感技術供應商Cepton已與移動研發機器人供應商Clearpath 達成合作,計劃將Cepton的HR80系列激光雷達傳感器的應...
2017-10-17 標簽:激光雷達 3852 0

LASER-Laser Amplification by Stimulated Emission of Radiation-受激輻射放大光-激光-改變世...
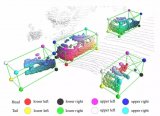
與二維圖像中會相互遮擋的物體不同,三維點云中的物體都是天然分離的,使得三維目標內部各個部分的相對位置可以精確獲取,這些方法將有效提高目標檢測方法的性能。...
激光雷達分單線和多線這兩大類,針對這兩類Lidar所使用的算法也不盡相同。 首先單線雷達一般應用在平面運動場景,多線雷達則可以應用于三維運動場景。

機載激光雷達是指安裝在飛行器(如飛機、直升機、無人機等)上的激光雷達系統,用于從空中對地面或其他目標進行測量、成像和監測。

本篇文章主要分析,常規的ROS機器人是如何使用Navigation導航包實現實時定位的,定位精度的決定性因素等內容,結構上分為詳細介紹、概括總結、深入思...
相較于激光雷達SLAM系統,視覺SLAM系統具有不主動發出信號的優點。此外,視覺是對環境的稠密感知,可以利用視覺特征構建出更符合人類感知的環境地圖。
激光二極管是通過一塊玻璃來傳輸數字脈沖信號的。該信號也會反射到D2光電二極管上。該信號的處理提供了傳輸時間及系統中內置的電子延遲。
 換一批
換一批
編輯推薦廠商產品技術軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯網 | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發電 | UPS | AR | 智能電網 | 國民技術 | Microchip |
| 開關電源 | 步進電機 | 無線充電 | LabVIEW | EMC | PLC | OLED | 單片機 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 藍牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太網 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 語音識別 | 萬用表 | CPLD | 耦合 | 電路仿真 | 電容濾波 | 保護電路 | 看門狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 閾值電壓 | UART | 機器學習 | TensorFlow |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1