完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
電子發燒友網技術文庫為您提供最新技術文章,最實用的電子技術文章,是您了解電子技術動態的最佳平臺。
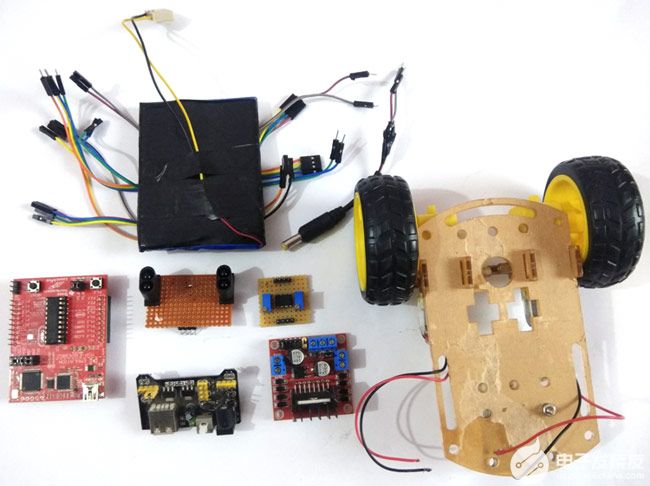
在這個項目中,我們將學習如何使用Arduino構建一個簡單的機器人,它可以向火移動并在火周圍抽水來撲滅火。這是一個非常簡單的機器人,可以教我們機器人的基本概念;一旦您了解了以下基礎知識,您就可以構建更復雜的機器人。所以讓我們開始吧......
伺服系統(servomechanism)又稱隨動系統,是用來精確地跟隨或復現某個過程的反饋控制系統。伺服系統使物體的位置、方位、狀態等輸出被控量能夠跟隨輸入目標(或給定值)的任意變化的自動控制系統。...
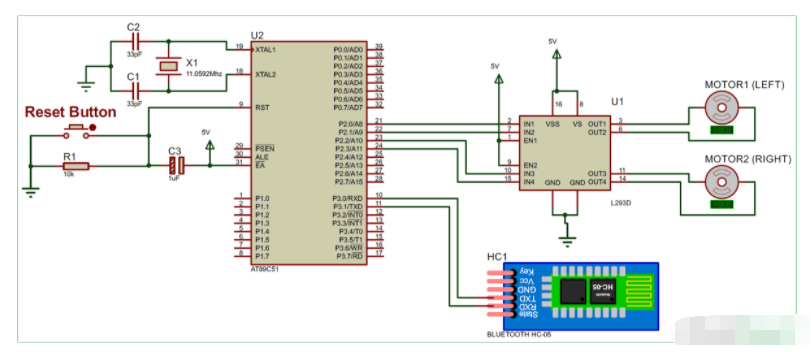
在這個項目中,我們將使用8051微控制器和藍牙模塊構建一個Android手機控制的機器人。該機器人是使用直流電機設計的,直流電機的方向將由從安卓應用程序收到的命令控制。機器人的狀態被發送回安卓應用程序。該項目還將幫助HC-05藍牙模塊與8051微控制器的接口....
人類手臂的作用是將手移動到不同的位置。類似地,機器臂的作用則是移動末端執行器。您可以在機器臂上安裝適用于特定應用場景的各種末端執行器。...
碼垛動作指令:以使用具有趨近點、堆疊點、回退點的路徑點作為位置 數據的動作指令,是碼垛專用的動作指令。該位置數據通過碼垛指令每次都 被改寫。...
”→“KUKA Extension Bus (STS-X44)”→“EK1100 EtherCAT Coupler(2A E-Bus)”→“EL6752 DeviceNet Master”→“DeviceNet IO”,雙擊“Generic DeviceNet Device”,彈出 DeviceNe...
定期對ABB機器人的數據進行備份,是保證ABB機器人正常工作的良好習慣。ABB機器人數據備份的對象是所有正在系統內存運行的RAPID程序和系統參數。當機器人系統出現錯亂或者重新安裝新系統以后,可以通過備份快速地把機器人恢復到備份時的狀態。...
處理方式:檢查電機是否過熱,如電機溫度正常則檢查連接電纜是否正常(可能是控制柜處航空插頭沒插好λ如果査不出問題,又著急用機器人,可臨時將報警信號短接,不過注意,此時電機真正過熱后也不會報警,可能會引起電機燒毀。...
IMU通常包含一個3軸加速度計和一個3軸的陀螺儀,是測量物體三軸姿態角(或角度率)以及加速度的裝置。...
相機非線性矯正2、相機與機器人做9點標定3、計算機器人的旋轉中心4、相機通過公式計算得出最終輸出結果注:由于選擇中心距離視野很遠,通常擬合出來的旋轉中心存在比較大的誤差,給定位精度造成影響。...
在我國,工業機器人廣泛應用于制造業,不僅僅應用于汽車制造業,大到航天飛機的生產,軍用裝備,高鐵的開發,小到圓珠筆的生產都有廣泛的應用。并且已經從較為成熟的行業延伸到食品,醫療等領域。...
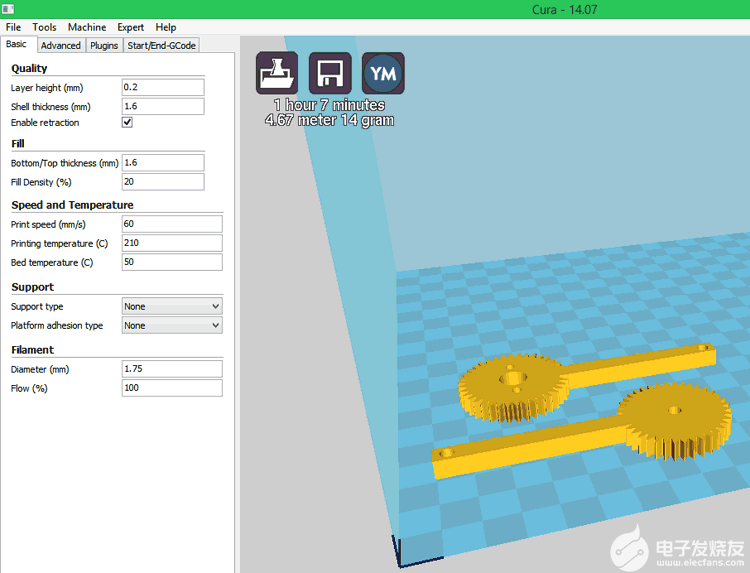
在本教程中,我們將在Arduino和MG995伺服電機的幫助下構建自己的機械臂。機器人總共有4個自由度(DOF),不包括夾具,可以通過電位計控制。除此之外,我們還將對其進行編程,使其具有錄制和播放功能,以便我們可以記錄動作并要求機械臂根據需要多次重復它。聽起來很酷吧!!!所以讓我們開始構建.......
線路跟隨機器人因其簡單性而成為學生和初學者中流行的機器人項目之一。它遵循一條線,黑色或白色,具體取決于您如何對微控制器進行編程。在這里,我們使用德州儀器的 MSP430 啟動板制作一個線路跟隨機器人,它遵循黑線。...
根據中國移動機器人(AGV/AMR)產業聯盟數據,新戰略移動機器人產業研究所統計,2022年三季度工業應用移動機器人行業約有16家企業推出了超18款產品,涵蓋各個類型。...
全球定位系統(GPS)作為一種機器人常用定位方式,受制于天氣、無線電、遮擋等環境因素,導致導航系統實時性與可靠性難以保證,環境的未知以及機器人運動的不確定性會對SLAM系統的魯棒性與穩定性提出更高要求,為了解決這一問題,有必要進一步研究SLAM以及慣性導航技術。...
在制造業中,工作人員通常在有毒化學品、密閉空間或重型機器等危險環境中工作。自主移動機器人使用傳感器、人工智能和計算機視覺技術來觀察和理解周圍環境,并自主導航。...
對于程序中的某一范圍的動作語句,偏移功能可將其已示教完成的位置轉移到其他位置。偏移的形式包括:程序偏移,鏡像偏移和角度輸入偏移。...
關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1




