完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
電子發燒友網技術文庫為您提供最新技術文章,最實用的電子技術文章,是您了解電子技術動態的最佳平臺。
機器人的焊接控制器的通訊連接力的輸入點 SG_Force_WT_S[1]=793 起始字節 SG_Force_WT_E[1]=800 結束字節 SG_GunForce= SG_PointForces[1] 傳遞力值...
這個有趣但復雜的項目將涵蓋從設計構建機器人到 linux (raspberry pi) 中的高級配置,再到構建 Android 應用程序和控制機器人。...
BASE坐標系: 可根據需要定義用戶坐標系。 當機器人配備多個工作臺時,選擇用戶坐標系可使操作更為簡單 。在用戶坐標系中, TCP 點將沿用戶自定義的坐標軸方向運動。...
雖然它是高速運動的軟體機器人,但僅有毫米等級大小。與傳統機器人采用塑料、鋁和金屬制造不同,這種超速機器人是由聚合物和形狀記憶合金等柔性材料制成。...
移動機器人運動控制系統的設計主要包括系統的功能和體系結構設計,功能設計主要完成控制功能和算法的軟件設計,而體系結構設計是功能在硬件上的實現。根據面向的任務和環境不同,對移動機器人運動控制系統的設計也不同。...
碼垛 E:包括碼垛 E(單路徑模式)和碼垛 EX(多路徑模式) 適用于復雜的堆疊模式(工件姿勢改變,堆疊時的底面形狀不是四角形)。...
成長計劃 人工智能重新創造機器人 工程師成長計劃第十三期,入門智能機器人設計。 從機器狗到仿生機器人,從掃地機器人到無人駕駛出租車。各種各樣的清潔機器人,送貨機器人已經融入人們的生活,并且創造了巨大的商業價值。 在高性能邊緣計算芯片和人工智能的加持下,機器人,正在從實驗室走向商業落地。對于工程師而言...
對人形機器人銷量的假設:關于人形機器人市場規模,我們認為可以參考特斯拉電動車的 放量節奏。回溯歷史,Model-S 在 2012 年推出,2013 年特斯拉電動車銷量達到 2.2 萬輛, 2014 年達到 3.2 萬輛,2015 年實現 5.1 萬輛。...
室內定位模擬算法 1、三角定位(Triangulation),需要借助固定基站或者已知基站位置信息,GPS等無線網絡定位法。 2、鄰近(Proximity), 使用具有有限的感知范圍和分析能力的傳感器,RFID。 3、場景分析(Scene analysis),利用場景畫面中的特征完成定位分析,...
半導體設備行業是典型的高技術壁壘行業,這也是國內較為薄弱的領域。當前全球半導體設備市場主要由國外廠商主導,美國、日本、荷蘭等企業處于市場絕對主導地位。...
缺乏互操作性所產生的問題往往是經濟問題,而不是安全問題。也就是說,在兩個不能互操作的工業移動機器人相互 " 凝視 " 時,可能會導致生產效率的低下。雖然這些顯然是重要的問題,但它們也不屬于安全標準的范圍。...
手眼標定分為兩種類型:一種是眼在手上的手眼標定(Eye?in?Hand);一種是眼在手外的手眼標定(Eye?to?Hand)[8]。...
磁電式編碼器使用磁場感應元器件代替碼盤,因此可以在提高精度的同時保證體積相對較小。但是磁電編碼器價格比較昂貴,目前僅在精度要求、工況要求相對較高的領域適用,隨著未來磁場感應元器件價格的下降,磁電式編碼器將會有代替光電式編碼器的趨勢。...
今天我們將使用AVR 單片機構建一個線跟隨機器人。線跟隨機器人現在廣泛用于制造業、醫療、家庭應用和貨物倉庫。機器人不僅限于這些應用,還可以在未來的許多應用中擴展其應用。...
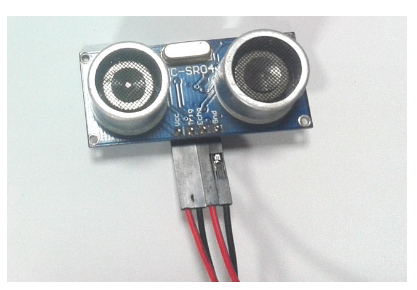
我們將使用超聲波傳感器和 Arduino 構建一個避障機器人。這里使用超聲波傳感器通過計算機器人與障礙物之間的距離來感知路徑中的障礙物。如果機器人發現任何障礙物,它會改變方向并繼續移動。...
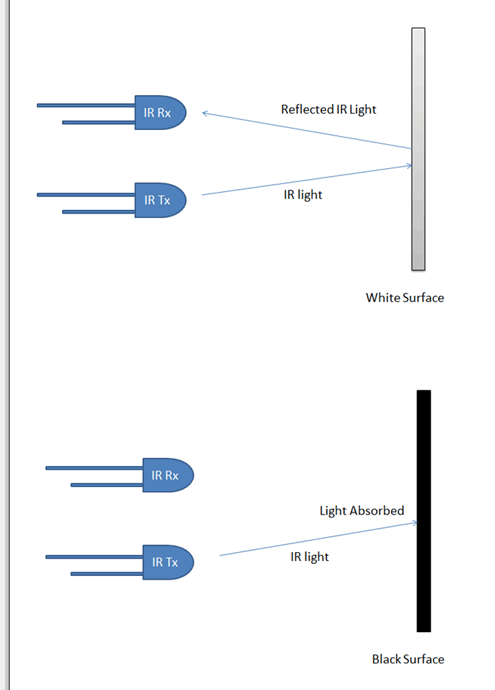
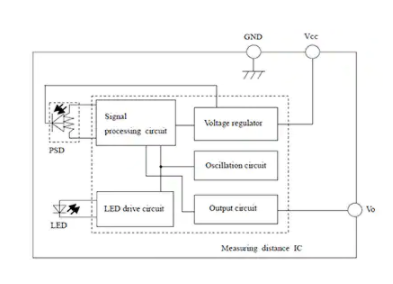
使用紅外線或超聲波距離測量可以實現更復雜的非接觸式墻壁感應。基于紅外線的測距傳感器,例如Sharp GP2Y0A51SK0F產生與反射到內置探測器上的紅外信號強度成比例的模擬電壓。該傳感器能夠測量 2 厘米至 15 厘米的距離,通過使用三角測量方法計算距離,最大限度地減少檢測表面的反射率對測量精度的...
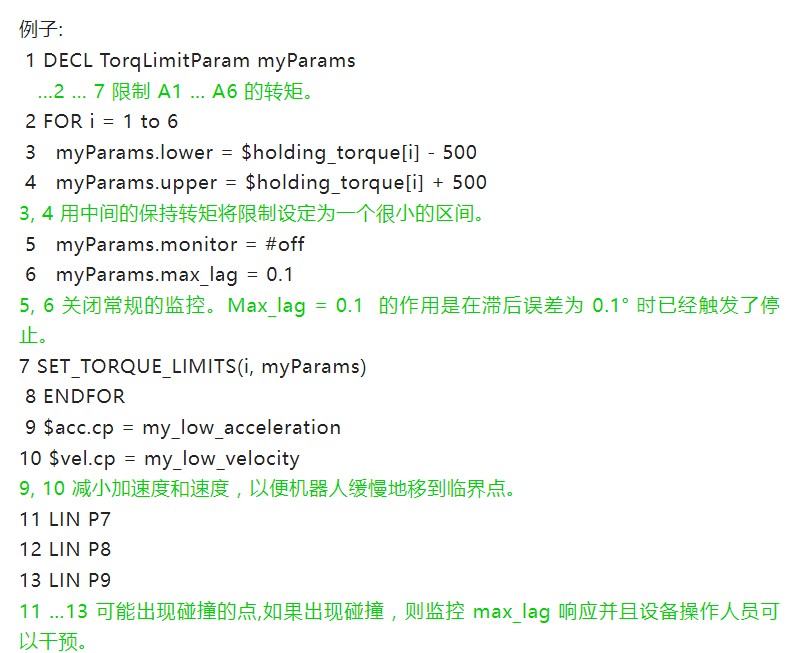
可以使用以下數據類型:BOOL,BYTE,CHAR,WCHAR,WORD,LWORD,DWORD,INT,UINT,USINT,SINT,LINT,ULINT,DINT,UDINT,REAL,LREAL。在類型為 ARRAY 或 STRUCT 的數據結構中也可使用這些數據類型。...
如果你想要制作一個遵循黑線行動的酷機器人。大概只需要在 2 小時內學習并制作就能夠完成帶有 PID 控制器的線跟隨器機器人。...

關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1




