簡單來說,SLAM是指機器人依靠自身傳感器在未知環境中獲得感知信息,遞增地創建周圍環境的地圖,同時利用創建的地圖實現自主定位。
2016-02-16 11:38:36 20515
20515 10G以太網光口與高速串行接口的使用越來越普遍,本文擬通過一個簡單的回環實驗,來說明在常見的接口調試中需要注意的事項。各種Xilinx FPGA接口學習的秘訣:Example Design。歡迎探討
2020-11-18 17:43:485295 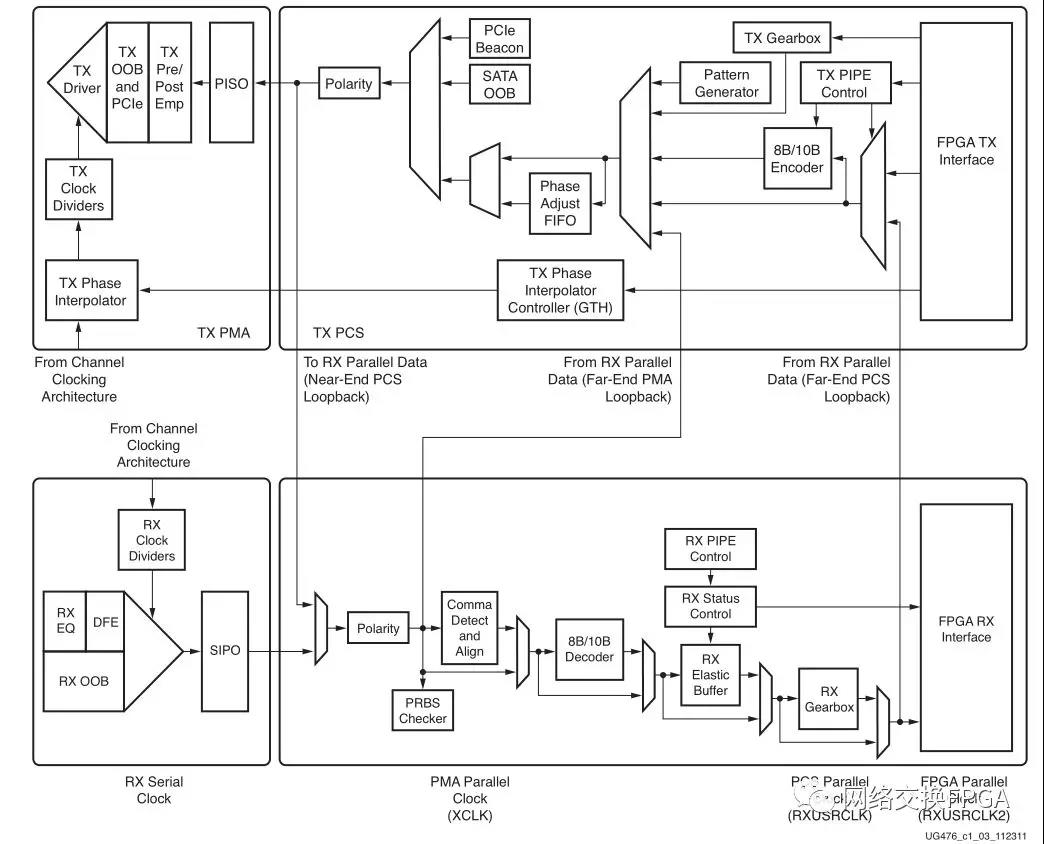
在高速系統中FPGA時序約束不止包括內部時鐘約束,還應包括完整的IO時序約束和時序例外約束才能實現PCB板級的時序收斂。因此,FPGA時序約束中IO口時序約束也是一個重點。只有約束正確才能在高速情況下保證FPGA和外部器件通信正確。
2022-09-27 09:56:091384 本文的優勢不僅包括討論A-SLAM的內部組成部分,還包括其應用領域、局限性和未來前景,以及對過去十年A-SLAM進行全面的統計調查。
2023-03-17 10:44:57504 根據ASIC邏輯設計,優化的約束是速度和面積。在物理設計中,我們需要對面積、速度和功率進行優化設計。根據所需的技術節點和策略進行更好的功耗規劃,總是有助于獲得芯片的布局。
2023-07-11 09:31:43353 
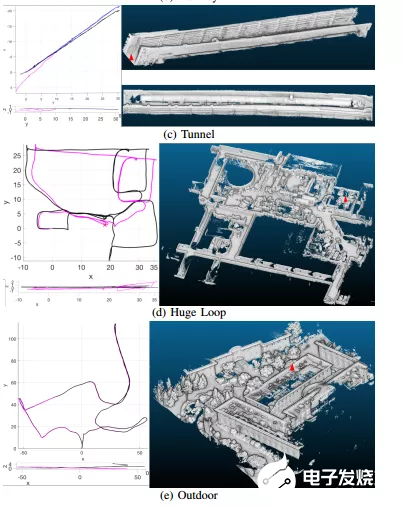
挑戰性的任務。本文提出了一種新的基于正態分布變換(NDT)的實時三維SLAM方法,該方法利用姿態圖優化和回環檢測來進一步提高mapping的一致性。我們創新地提取巷道中的地板和墻壁作為平面節點來構建地標約束,此外還通過無損檢測應用激光雷達里程
2023-08-16 10:14:491048 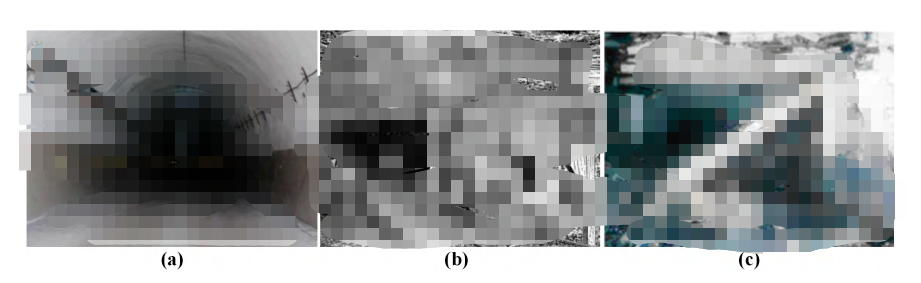
上周的組會上,我給研一的萌新們講解什么是SLAM,為了能讓他們在沒有任何基礎的情況下大致聽懂,PPT只能多圖少字沒公式,這里我就把上周的組會匯報總結一下。 這次匯報的題目我定為“視覺SLAM:一直在
2023-08-21 10:02:071574 
I/O約束(I/O Constraints)包括I/O標準(I/OStandard)約束和I/O位置(I/O location)約束。
2023-11-18 16:42:28507 
在進行布局約束前,通常會對現有設計進行設計實現(Implementation)編譯。在完成第一次設計實現編譯后,工程設計通常會不斷更新迭代,此時對于設計中一些固定不變的邏輯,設計者希望它們的編譯結果
2024-01-02 14:13:53434 
LSD-SLAM 即 Large-Scale Direct SLAM,兼容單目相機和雙目相機。LSD-SLAM是一種基于光流跟蹤的直接法SLAM,但是實現了半稠密建圖,建圖規模大,可以在線實時運行。
2024-02-26 09:41:50272 
SLAM技術作為機器人自主移動的關鍵技術,讓很多人都誤解為:SLAM=機器人自主定位導航。 其實,SLAM≠機器人自主定位導航 ,不解決行動問題。 SLAM如其名一樣,主要解決的是機器人的地圖構建
2018-08-24 16:56:24
常有必要的 。 回環檢測失敗 如何提升機器人回環檢測能力? 那么,怎么才能讓機器人的回環檢測能力得到一個質的提升呢?首先要有一個算法上的優化。 1. 基于圖優化的SLAM算法 基于圖優化
2019-03-06 15:38:04
上升,SLAM導航迎來了廣闊的市場。將SLAM運用在AGV物流小車上,可以不用預先鋪設任何軌道,方便工廠生產線的升級改造和導航路線的變更,實時避障,環境適應能力強,同時能夠更好地實現多AGV小車的協調
2018-12-06 10:25:32
作為輔助。 AR AR通過電腦技術,將虛擬的信息應用到真實世界,真實的環境和虛擬的物體實時地疊加到了同一個畫面或空間同時存在。這一畫面的實現,離不開SLAM技術的實時定位。雖然在AR行業有很多可代替技術,但是,SLAM技術是最理想的定位導航技術。
2020-12-01 14:26:37
研究生期間進行了基于2D激光雷達的SLAM的研究,當時主要做了二維激光雷達的數據處理。小弟不才,沒有入得了SLAM的坑,卻一直謎之向往,如今得以機會,決定正式邁出第一步,徹底進入SLAM的坑!心中
2021-08-30 06:13:31
本帖最后由 小芳 于 2012-2-27 15:41 編輯
想問下系統時鐘約束是什么情況啊?是不是在這里設置下?
2012-02-27 15:41:31
我使用AD9361器件,在數字輸入接口自回環,發現自增數回環正常,正弦波回環錯誤。不明白問題原因!
2023-12-04 06:22:21
移動機器人自主能力和環境適應能力,實現在未知環境中進行自主定位和導航。SLAM運用在AGV物流小車上,可以不用預先鋪設任何軌道,方便工廠生產線的升級改造和導航路線的變更,實時避障,環境適應能力強,更好
2018-11-09 15:59:01
AT32F系列 CAN回環模式使用演示AT32F系列CAN回環模式的使用方法。
2023-10-27 06:05:31
不懂回環模式是什么
2024-02-20 07:19:55
最近想做一個回環實驗,通過FPGA板實現,但是不知道該怎么做。求得為大神給小弟指點迷津。{:soso_e163:}
2012-07-11 12:05:31
是一項浩大的工程,這標志著設計者能夠完全控制設計的物理實現。這是一個理想目標,是不可能在有限的時間內完成的。通常的做法是設計者對設計的局部進行寄存器布局約束并通過實際運行布局布線工具來獲得時序收斂
2016-06-02 15:54:04
通過對設計施加精準的控制來獲得可靠的時序收斂結果。對設計中的每一個寄存器手工進行布局位置約束并保證時序收斂是一項浩大的工程,這標志著設計者能夠完全控制設計的物理實現。這是一個理想目標,是不可能
2017-12-27 09:15:17
Intelligent Vehicles Applications1. 介紹2. HOOFR-SLAM2.1 系統框架2.2 HOOFR特征提取2.3 映射線程2.3.1 特征匹配1. 介紹提出一種HOOFR-...
2021-12-21 06:35:49
STM32如何快速實現USB虛擬串口+回環測試+USB轉TTL的功能?
2021-12-08 06:20:52
本文主要介紹說明XQ6657Z35-EVM評估板Cameralink回環實現例程的功能、使用步驟以及各個例程的運行效果。(基于TI KeyStone架構C6000系列TMS320C6657雙核
2023-02-24 10:00:56
申請理由:本人是江南大學機械工程機電檢測與控制研究中心在讀研究生,正在做變約束連桿機械手控制系統的設計研究,為提高系統的智能程度,也為了更好的學習ARM編程技能,希望可以使用該產品。項目描述:主要
2015-12-02 16:06:26
題目:基于SLAM的移動機器人設計嵌入式PPT應具有的幾個部分1、有哪些硬件 1)小車 2)STM32F429開發板 3)樹莓派3b+開發板 4)4g通信模塊 5)GPS模塊 6
2021-11-08 06:17:14
基于視覺的slam自動駕駛,這是我們測試的視頻《基于slam算法的智能機器人》調研分析報告項目背景分析機器人曾經是科幻電影中的形象,可目前已經漸漸走入我們的生活。機器人技術以包含機械、電子、自動控制
2021-08-09 09:37:34
如何實現基于RK3399開發板的cartographer激光SLAM建圖模塊的設計?
2022-03-07 07:05:11
安全氣囊在輔助約束系統(SRS)中發揮著至關重要的作用。目前,乘用車安裝安全氣囊已經成為一種標準。大家都知道在汽車發生碰撞時,安全氣囊和安全帶可降低乘員頭部和上身撞擊車內部件的幾率。它們還可通過使
2018-12-10 10:01:08
本文提出的通過微處理器加FPGA結合串行菊花鏈實現可重構的方式,實現了動態可重構FPGA結構設計的一種應用。
2021-05-10 06:22:19
大家好,我想學習SLAM技術有資深的老師愿意教我嗎?qq:496397940
2018-11-09 13:42:27
服務機器人想要自由行走,實現自主定位導航是關鍵,自主定位導航包括定位、建圖與路徑規劃。SLAM作為機器人定位導航的核心技術,正不斷獲得行業內的重視,但SLAM只是完成定位與地圖創建這兩件事,它并不
2018-10-10 16:29:21
什么是回環檢測?在講解回環檢測前,我們先來了解下回環的概念。在視覺SLAM問題中,位姿的估計往往是一個遞推的過程,即由上一幀位姿解算當前幀位姿,因此其中的誤差便這樣一幀一幀的傳遞下去,也就是我們
2018-10-23 17:47:22
SLAM主要解決機器人的實時定位與自動建圖問題,那么,在實際應用時,SLAM究竟是如何實現的呢?在實現過程中有哪些難點?這是一個完整的SLAM和導航系統的主要架構圖:其中,SLAM核心過程包括3個
2017-06-30 15:05:26
SLAM(同步定位與地圖構建),是指運動物體根據傳感器的信息,一邊計算自身位置,一邊構建環境地圖的過程,解決機器人等在未知環境下運動時的定位與地圖構建問題。目前,SLAM 的主要應用于機器人、無人機、無人駕駛、AR、VR 等領域。其用途包括傳感器自身的定位,以及后續的路徑規劃、運動性能、場景理解。
2020-05-20 08:19:40
在機器人運動控制系統架構中,可分為最底層、中間通信層和決策層三大層面,最底層包含了機器人本身的電機驅動和控制部分,中間通信層是底層部分和決策層的通信通路,而決策層則是實現機器人的定位建圖及導航。在
2021-07-05 06:41:57
什么是激光SLAM?視覺VSLAM又是什么?激光SLAM和視覺VSLAM有哪些不同之處?
2021-11-10 07:16:02
什么是激光SLAM?激光SLAM技術在機器人運動控制系統中的應用是什么?
2021-07-30 06:37:25
[get_cellsswitch_v2_i/srio_clk_inst/srio_mmcm_inst]2. 塊布局約束通過增加非關鍵塊的邏輯密度來節省布局布線資源、提高性能。通過更好的放置來減少所選邏輯的路由延遲
2018-09-26 15:32:20
【總結】視覺SLAM筆記整理
2020-07-17 14:05:20
抖動,必要時調整 ▲ SLAM 3.0 ——采用圖優化的SLAM方式 SLAM 3.0 相比較于前兩代,采用圖優化方式進行構圖,能實現百萬平米級別的地圖構建能力,同時擁有主動式回環閉合糾正能力,能
2019-01-21 10:57:46
在PIC32MX1/2家族的IO規范中(表30-8),VIL_MAX和VIH_MIN根據IO是否“具有PMP”而不同。“IO與PMP”是否意味著PIN是可MPMP的,或者PIN是否與PMP功能一起使用?
2019-08-02 10:50:03
物理約束文件ADC可做哪些約束?
2023-08-11 08:37:29
實現單目視覺同時定位與建圖(SLAM)仿真系統,描述其設計過程。該系統工作性能良好,其SLAM算法可擴展性強,可以精確逼近真實單目視覺SLAM過程。以方便SLAM算法的研究為目標,提
2009-04-15 08:50:37 82
82 本文針對當前權限控制框架在權限控制和數據保護方面存在的問題,提出一種新的權限控制解決方案——基于RBAC 的限制約束擴展。文章重點描述了限制約束功能的原理與實現
2010-01-15 16:08:026
600VIL4216 700VIL4217 800VIL4218電路原理電路圖
2009-07-01 10:58:59386 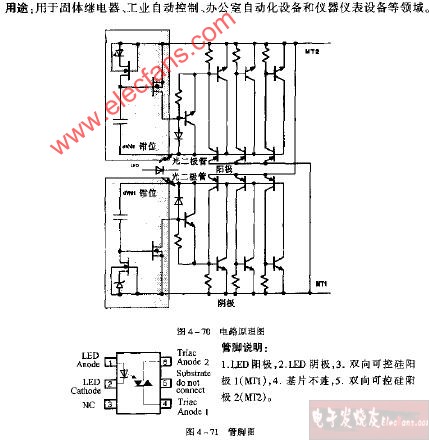
600VIL4216 700VIL4217 800VIL4218管腳電路圖
2009-07-01 10:59:36394 
xilinx 約束實現
2017-03-01 13:12:4715 十天學會LM4F232——串口回環
2017-10-27 15:16:476 XDC中的I/O約束雖然形式簡單,但整體思路和約束方法卻與UCF大相徑庭。加之FPGA的應用特性決定了其在接口上有多種構建和實現方式,所以從UCF到XDC的轉換過程中,最具挑戰的可以說便是本文將要
2017-11-17 19:01:006666 
作為賽靈思用戶論壇的定期訪客(見 ),我注意到新用戶往往對時序收斂以及如何使用時序約束來達到時序收斂感到困惑。為幫助 FPGA設計新手實現時序收斂,讓我們來深入了解時序約束以及如何利用時序約束實現
2017-11-24 19:37:554903 
程序簡介 -工程名稱:CAN回環測試 -實驗平臺: 秉火STM32 F429 開發板 -MDK版本:5.16 -ST固件庫版本:1.5.1 【 !】功能簡介: 使用CAN回環模式進行通訊實驗。 學習
2017-12-13 15:35:1430 、幀間配準、位姿變換估計以及閉環檢測對SLAM系統的影響,建立了關鍵幀閉環匹配算法和SLAM實時性與魯棒性之間的關系,提出了一種基于ORB關鍵幀匹配算法的SLAM方法。運用改進ORB算法加快了圖像特征點提取與描述符建立速度;結合相機模型與深度信息,
2018-03-26 10:57:326 高仙的SLAM2.0技術體系核心,是基于多傳感器融合+深度學習的架構,即語義SLAM。高仙SLAM2.0技術方案以語義分析、機器學習為基礎,結合云端實時信息處理以及專為多傳感器融合而開發的專業算法體系,真正實現了SLAM在建圖和導航兩個環節的完整應用。
2018-05-15 16:48:308535 介紹FPGA約束原理,理解約束的目的為設計服務,是為了保證設計滿足時序要求,指導FPGA工具進行綜合和實現,約束是Vivado等工具努力實現的目標。所以首先要設計合理,才可能滿足約束,約束反過來檢查
2018-06-25 09:14:006374 SLAM要實現定位和制圖,第一步就是采集數據,而采集數據的關鍵就是傳感器,可以說沒有傳感器就沒有SLAM。而SLAM上的傳感器種類多樣,目前主流的我們可以將其分為兩大類:激光雷達和攝像頭。
2018-07-17 16:59:0232392 大概從幾個方面來講一下SLAM的實現和應用:第一個是從傳感器的角度,第二個是從算法實現的角度,第三個是從搭載硬件傳感器平臺上來說這些問題。
2018-09-15 10:26:4012330 物理優化是Vivado實現流程中更快時序收斂的重要組成部分。
了解如何在Vivado中應用此功能以交換運行時以獲得更好的設計性能。
2018-11-23 06:06:003728 本文是調研視覺SLAM中的實現方法的總結,包括三方面內容:姿態計算、閉環檢測、BA優化。
2019-05-18 11:49:014037 近年來SLAM系統與其他傳感器的融合成為了一大熱點。
2019-05-24 09:45:0612481 顯著地減小累積誤差。回環檢測實質上是一種檢測觀測數據相似性的算法。對于視覺SLAM,多數系統采用目前較為成熟的詞袋模型(Bag-of-Words, BoW)。詞袋模型把圖像中的視覺特征(SIFT
2019-08-09 17:31:201430 顯著地減小累積誤差。回環檢測實質上是一種檢測觀測數據相似性的算法。對于視覺SLAM,多數系統采用目前較為成熟的詞袋模型(Bag-of-Words, BoW)。詞袋模型把圖像中的視覺特征(SIFT
2019-09-11 22:01:351759 墊標準+和墊專業使用的強大和易于使用的約束管理系統創建、評審和驗證PCB設計約束。
2019-11-04 07:02:001445 我需求將FPGA處理的視頻數據通過USB發送給電腦,先實現一個小目標,做一個簡單的數據回環。
2019-10-27 10:35:271260 如今科技發展日新月異,諸如機器人、AR/VR等前沿科技產品已走入了大眾生活當中。但是想在這些領域讓用戶有更好的體驗,就需要很多底層技術的支持,SLAM就是其中之一。如果說機器人離開了SLAM
2020-04-17 09:21:4153848 SLAM作為機器人自主定位導航的重要突破口正不斷引起業內重視,它是實現機器人自主行走的關鍵技術,可幫助機器人實現即時定位與地圖構建,在實際應用中,SLAM技術究竟又是如何實現的呢?一起來探個究竟
2021-10-14 14:35:091405 SLAM作為機器人自主定位導航的重要突破口正不斷引起業內重視,它是實現機器人自主行走的關鍵技術,可幫助機器人實現即時定位與地圖構建,在實際應用中,SLAM技術究竟又是如何實現的呢?一起來探個究竟。
2020-12-26 09:23:19569 在SLAM系統中增加更多的相機可以提高魯棒性和準確性,但會使視覺前端的設計變得非常復雜。因此,文獻中的大多數系統是為特定的相機配置定制的。在這項工作中,我們的目標是一個適用于任意多相機設置的自適應
2021-01-07 11:51:061792 ,使重釆樣后的粒子保持多樣性。結合似然域模型與意外對象觀測概率,使激光測量模型更好地反映真實環境。實驗結果表明,改進的重釆樣方法定位效果較好,相對原激光SLAM算法,改進的激光SLAM算法在動態環境中的建圖和定位精度更高。
2021-04-01 10:48:316 傳感器讀取數據后,視覺里程計估計兩個時刻的相對運動(Ego-motion),后端處理視覺里程計估計結果的累積誤差,建圖則根據前端與后端得到的運動軌跡來建立地圖,回環檢測考慮了同一場景不同時刻的圖像,提供了空間上約束來消除累積誤差。
2021-04-14 13:36:215670 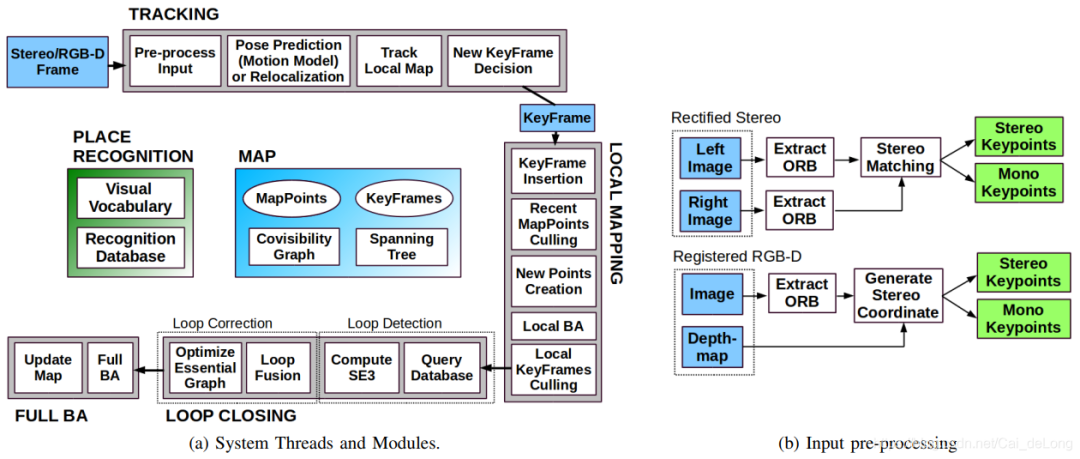
課題組已將該研究成果應用于智能駕駛即時定位與建圖(SLAM)任務中,提出了基于三維激光數據的層級式SLAM方法,實現了無GNSS環境下智能無人系統的高精度自主定位定姿,在智能駕駛國際著名公開數據集KITTI上排名全球第7(純激光SLAM算法中排名全球第4)。
2021-04-20 09:19:301806 
可進入的每個角落。SLAM最早由Smith、Self和Cheeseman于1988年提出。由于其重要的理論與應用價值,被很多學者認為是實現真正全自主移動機器人的關鍵。 詞語
2021-08-26 16:07:316792 linux spi應用層驅動以及回環測試代碼
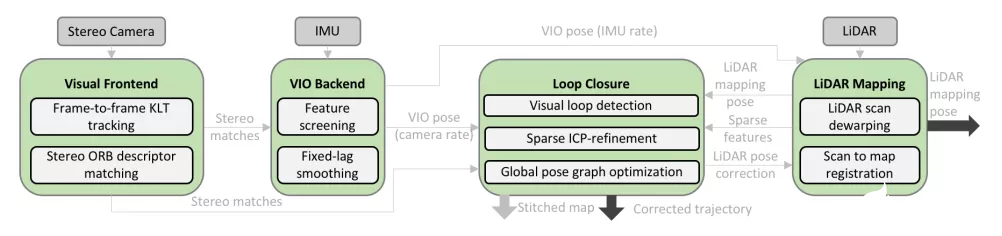
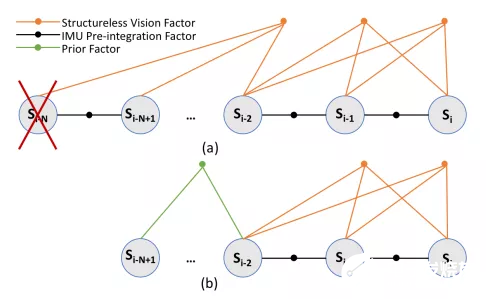
2021-10-22 15:47:362 本文為作者在從事Slam相關工作中對這幾年遇到以及改進過相關VIO算法內容總結。 1.背景介紹 一個完整的 SLAM(simultaneous localization and mapping
2021-11-03 09:45:172078 
./oschina_soft/Snake-SLAM.zip
2022-06-16 11:27:432 (1) LT-SLAM, 在LT-SLAM模塊中,Kim團隊利用multi-session SLAM,基于激光雷達的global localizer實現回環檢測,以此內部聯合優化多個
2022-10-09 15:01:391292 目前視覺SLAM回環檢測主要方式有傳統的詞袋模型以及基于概率和詞袋模型的一些改進算法,但是傳統方式依然存在過多的人工干預,對于場景中動態對象的處理不是十分理想,并且計算量較大,響應比較慢。而深度學習技術的出現及發展在回環檢測問題的解決上提供了新的方向。
2022-11-09 12:38:211364 視覺SLAM是一種基于視覺傳感器的 SLAM 系統,與激光傳感器相比,視覺傳感器具有成本低、保留環境語義信息的優點,能夠與深度學習進行大量結合。
2022-11-29 21:38:37627 (Visual SLAM,VSLAM)是將圖像作為主要環境感知信息源的SLAM系統,VSLAM以計算相機位姿為主要目標,通過多視幾何方法構建3D地圖[4]
2022-12-02 15:00:281149 手持SLAM設備最大的特點肯定要放到手持這個動作上面,由于SLAM算法的優越性,手持可以做到走到哪里測到哪里。
2022-12-27 10:43:413282 Lego-LOAM是基于軌跡位姿方法的回環檢測,使用KDtree尋找當前位姿的歷史最近位姿,之后把歷史位姿作為候選,用ICP算法修正位姿。
2023-01-11 09:12:591630 示例中采用的是“硬約束”,因為定義在類中的約束與隨機時指定的內嵌約束“矛盾”,所以導致約束解析器解析隨機失敗,即“硬約束”要求所有相關的約束條件不能互相矛盾,否則將會隨機失敗。
2023-03-15 16:56:582541 視覺里程計最近幾年越來越受到學術界以及工業界的認可,以ORB和VINS為代表的視覺SLAM已經可以滿足絕大多數場景,而OV2SLAM在其他VSLAM中脫穎而出,其實時性以及具體的回環性能在測試中都得到了認可。
2023-03-21 17:16:31768 與ORB-SLAM2相比,ORB-SLAM3在處理大視差和長時間未觀測到的場景時效果更好。它還提供了更準確的幀間運動估計和更快的處理速度。
2023-06-19 09:28:121967 
根據ASIC邏輯設計,優化的約束是速度和面積。在物理設計中,我們需要對面積、速度和功率進行優化設計。根據所需的技術節點和策略進行更好的功耗規劃,總是有助于獲得芯片的布局。
2023-07-09 11:28:33334 
激光雷達是最古老,研究也最多的SLAM傳感器。它們提供機器人本體與周圍環境障礙物間的距離信息。常見的激光雷達,例如SICK、Velodyne還有我們國產的rplidar等,都可以拿來做SLAM。激光雷達能以很高精度測出機器人周圍障礙點的角度和距離,從而很方便地實現SLAM、避障等功能。
2023-08-16 10:31:081895 
傳統的同步定位與制圖(SLAM)系統使用環境的靜態點作為實時定位和制圖的特征。當可用的點特征很少時,系統很難實現。一個可行的解決方案是引入線特征。在包含豐富線段的復雜場景中,線段的描述差別不大,這可
2023-09-01 17:16:29314 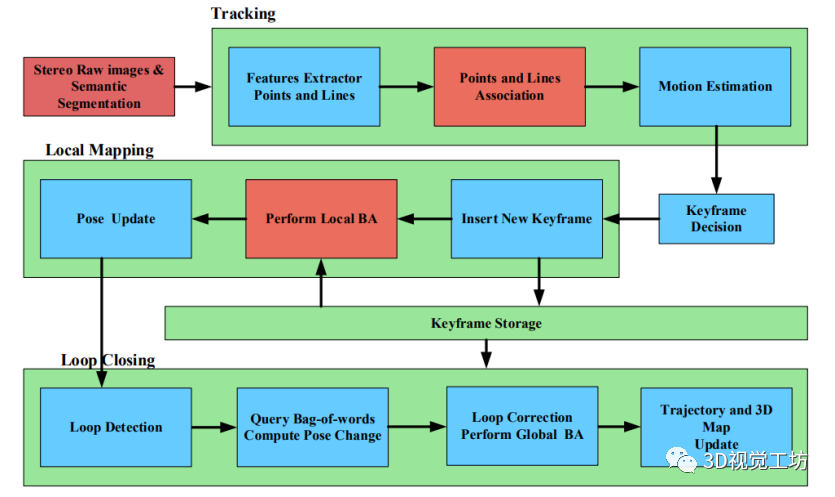
近年來,SLAM技術取得了驚人的發展,領先一步的激光SLAM已成熟的應用于各大場景中,視覺SLAM雖在落地應用上不及激光SLAM,但也是目前研究的一大熱點,今天我們就來詳細聊聊視覺SLAM的那些事兒。
2023-09-05 09:31:111381 
GO-SLAM主要還是基于NeRF進行稠密重建,可以發現相較于NICE-SLAM這些SOTA方案,GO-SLAM重建場景的全局一致性更好,這主要是因為它引入了回環和全局BA來優化累計誤差。
2023-09-11 10:03:29685 
相似結構一直是SLAM和SfM中很難處理卻又不得不處理的問題,如果機器人遇到了非常相似但實際不同的結構,很容易因為匹配數量足夠多而引發假陽性回環和重建失敗。傳統方法更多的還是利用匹配數量的閾值或者和其他幾何關系的比值閾值來判斷,這種方法在遇到高對稱結構時很容易失敗。
2023-09-20 15:15:26352 
理解,SLAM的主要功能就是讓機器人一邊計算自身位置,一邊構建環境地圖,這兩個過程相輔相成。可以說,SLAM技術是機器人后續自主行動和實現交互的基礎,SLAM也被認
2023-11-25 08:23:57999 
提出了一種基于RGB-D圖像序列的協同隱式神經同步定位與建圖(SLAM)系統,該系統由完整的前端和后端模塊組成,包括里程計、回環檢測、子圖融合和全局優化。
2023-11-29 10:35:18189 
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論