WARTE BIS E2200? ? ? ? $LOOP_MSG[]="E2200" ? ? ? $....

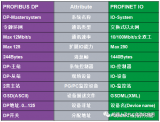
PROFINET IO與PROFIBUS DP的基本參數比較 總體來說,PROFINET IO的性能....
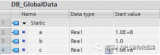
例如,數據類型 REAL 在程序中以 6 位小數的精度進行指定和計算。在計算浮點數(REAL和 LR....
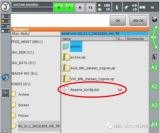
調試系統文件 在進行更改之前,強烈建議對機器人進行備份。 更改$config.dat的要求是注冊為“....
該功能塊庫可以用于S7-300/400單站系統或ET200S帶CPU的接口模塊通過CPU的集成PN口....

在首次接通連有機器人本體運動機構的 KR C4 時務必考慮以下步驟。 這些步驟不能取代首次投入運行的....

1.首次開機啟動,電池的電源線(X305)是沒有接的,需要插上,X305. 檢查機器人本體接線. 接....

1?全局數據包通信簡介 對于PLC之間的數據交換,只關心數據的發送區和接收區,全局數據包的通信方式是....

其中包含引用解釋器的進程指針的數據. 變量包含接下來將在解釋器中執行的塊的數據。 根據特定的解釋器,....

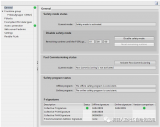
安全管理編輯器? 在“常規”(General)? 下,將顯示以下信息:?? –? 安全模式狀態? –....
ProConOS是一款高性能PLC運行時間引擎,專為基于嵌入式和PC的控制應用而設計. 概觀 Pro....
S7-1200支持UDP單播和UDP廣播,不支持UDP組播。

CPU的安全程序設置必須在“保護”選項卡和“F 參數”選項卡中進行。
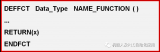
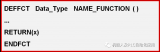
?DEFFCT ...ENDFCT:定義函數 DEFFCT 數據類型 名稱( ) RETURN 函數....
? 可以通過目錄管理單獨添加SGB選件包中未包括的目錄元素。 必須添加目錄元素“ VW_SGB”。 ....

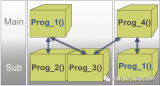
如果在子程序中滿足了特定的條件,使用 RETURN 返回到主程序中。無法將子程序中的值傳遞給主程序。
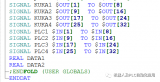
STRUC Iobus_Info_T CHAR name[256], drv_name[256], ....
![KUKA系統變量:$IOBUS_INFO[]讀取是否出現總線故障](https://file1.elecfans.com/web2/M00/88/A5/wKgaomRt5W-AR4GmAAAYSRZEjrw798.png)
GET_NAME”指令用于讀取 IO 設備或 DP 從站的名稱。該名稱將顯示在網絡視圖和 IO 設備....

...KS_KUKA_DateienTechpaket8.2Basicxxxxxxxxxarchiv....

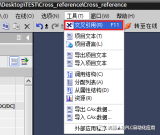
交叉引用列表提供項目中對象的使用概況。可以看到哪些對象相互依賴以及各對象所在的位置。
為了提高具有光纖或電氣線形總線型拓撲結構的工業以太網的網絡可用性,可以通過將終端設備連接在一起,將線....

借助模板創建程 Cell:現有的 Cell 程序,只能被替換或者在刪除 Cell 程序后重新創建。 ....
$PROG_INFO[]將某些系統狀態組合在一個結構中。 $PROG_INFO[ Interpret....
在幾個語句分支中選擇。? SWITCH 選擇標準 CASE 標記 1 指令塊 ? 指令塊 > 默認指....

$POS_ACT 當前笛卡爾機器人位置 E6POS結構類型的變量定義了TCP相對于BASE坐標系的設....

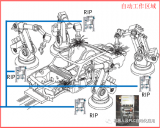
RIP的各元器件 1.控制RIP的USER程序在這里.正常情況下這個是大眾統一的標準程序.我只能說出....
? 導出文件? 如需與其他語言進行聯合編程,可以在文件--->導出中導出所需要的相應語言。? 導出的....

現場總線信號可在 WorkVisual 中進行編輯。例如可更改信號寬度,或調換字節順序。 1. 在窗....

對于未初始化的變量或數組元素,會將隨機值寫入緩沖區。由于隨機值可能會導致緩沖區接收器出現問題,因此建....
“ModuleStates”指令可用來讀取 PROFINET IO 設備或 PROFIBUS DP ....




 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1

