硬件電路設(shè)計(jì)上采用DSP 芯片和外圍電路構(gòu)成速度捕獲電路,電機(jī)驅(qū)動(dòng)控制器采用微控制芯片和外圍電路構(gòu)成了電流采樣、過流保護(hù)、壓力調(diào)節(jié)等電路,利用CPLD實(shí)現(xiàn)無(wú)刷直流電機(jī)的轉(zhuǎn)子位置信號(hào)的邏輯換相。賽車剎車控制器是由防滑控制器和電機(jī)驅(qū)動(dòng)控制器組成。
2014-10-11 11:30:54 850
850 
群組智能控制器的核心采用DSP TMS320F2812芯片,輔以CPLD EPM3128芯片來(lái)實(shí)現(xiàn)鍵盤和液晶的時(shí)序邏輯,減少擴(kuò)展芯片帶來(lái)的體積問題,外圍電路主要包括信號(hào)調(diào)理電路和脫扣控制電路等。為適應(yīng)智能電網(wǎng)的無(wú)線通信,在智能控制器中添加GPRS模塊,使得斷路器能夠更好地融入到智能電網(wǎng)中。
2020-09-07 17:52:001851 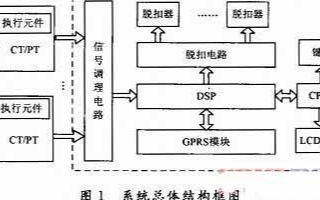
本帖最后由 zhaironghui 于 2015-7-28 17:40 編輯
自己做的一塊板子,(CPLD 和 DSP 上電后有引腳連接在一起)1.當(dāng)只向其中一塊芯片下載程序時(shí)能成功。(比如向
2015-07-28 17:24:08
CPLD控制AD 轉(zhuǎn)換芯片進(jìn)行轉(zhuǎn)換,轉(zhuǎn)換之后將數(shù)字信號(hào)傳給外部RAM ,請(qǐng)問各位大神,怎么編寫DSP訪問外部RAM的程序。
2016-03-05 11:37:37
DSP控制器是一款針對(duì)于工業(yè)控制而開發(fā)的DSP芯片,是一款32位的高性能單片機(jī)。本書首先概述DSP控制器的發(fā)展過程及其特點(diǎn),接著介紹DSP控制器的總體結(jié)構(gòu),特別說(shuō)明DSP控制器多組總線技術(shù)與并行機(jī)
2020-09-07 10:10:15
如何在CPLD內(nèi)部構(gòu)造一個(gè)雙口RAM,實(shí)現(xiàn)DSP從CPLD中讀寫數(shù)據(jù)
2015-10-25 17:14:50
DSP的模擬控制器智能轉(zhuǎn)換
2015-07-12 11:32:20
本文在硬件電路設(shè)計(jì)上采用DSP芯片和外圍電路構(gòu)成速度捕獲電路,電機(jī)驅(qū)動(dòng)控制器采用微控制芯片和外圍電路構(gòu)成了電流采樣、過流保護(hù)、壓力調(diào)節(jié)等電路,利用CPLD實(shí)現(xiàn)無(wú)刷直流電機(jī)的轉(zhuǎn)子位置信號(hào)的邏輯換相。在
2020-03-10 08:06:22
設(shè)計(jì)一個(gè)dsp太陽(yáng)能控制器,新手求大神指點(diǎn)!謝謝
2014-01-08 12:17:28
各位老師,我現(xiàn)有一帶3個(gè)霍爾位置傳感器的BLDC馬達(dá),控制器端全橋方波控制。發(fā)現(xiàn)每次給控制器上電瞬間,馬達(dá)就會(huì)抖動(dòng)一下,好像是瞬間給馬達(dá)通了一下電。默認(rèn)狀態(tài)應(yīng)該是上電后馬達(dá)不工作,只有給目標(biāo)轉(zhuǎn)速后才能工作。但是,為什么每次上電都抖動(dòng)一下呢?這個(gè)現(xiàn)象是控制器上電時(shí)的誤操作還是正常的一些檢測(cè)功能呢?
2018-10-19 17:17:41
,進(jìn)而影響賽車的整體性能。本文設(shè)計(jì)了賽車全電防滑剎車控制器的硬件和軟件,最后研究了適合于賽車剎車的控制律。
2019-10-23 08:33:30
摘要:討論了CAN總線控制器與DSP之間的接口,介紹了流行的CAN控制器芯片SJA1000和TMS320系列DSP芯片的接口時(shí)序,并給出了它們的接口方法和電路。關(guān)鍵詞:CAN控制器 DSP 時(shí)序
2018-12-03 15:22:37
并作適當(dāng)?shù)奶幚恚拍艽_定閉合鍵的位置。結(jié)語(yǔ)本文簡(jiǎn)單介紹了TI16位控制器DSP與液晶顯示模塊及鍵盤模塊之間的接口方案.利用了CPLD來(lái)進(jìn)行邏輯轉(zhuǎn)換和控制。提供了一種高速器件和慢速接口直接的連接方法,通過這個(gè)接口方案研究,為以后系統(tǒng)的開發(fā)提供了一種新的思路。
2019-06-13 05:00:07
申請(qǐng)理由:本公司已經(jīng)大量使用TI的28339DSP用作電機(jī)控制器的控制板上。一直比較關(guān)心TI技術(shù)發(fā)展。個(gè)人想率先體驗(yàn)TI的DSP產(chǎn)品項(xiàng)目描述:我們聚焦新能源汽車的電機(jī)控制器,BMS和整車控制器研發(fā)
2015-09-10 11:08:09
什么時(shí)候適合采用CPLD替代微控制器?什么時(shí)候可以采用CPLD作為微控制器的輔助器件?
2021-04-28 06:16:59
分享一款不錯(cuò)的基于CPLD的LED點(diǎn)陣顯示控制器
2021-04-26 06:00:20
本資料介紹了電動(dòng)汽車的電機(jī)及控制器,電機(jī)控制器是通過主動(dòng)工作來(lái)控制電機(jī)按照設(shè)定的方向、速度、角度、響應(yīng)時(shí)間進(jìn)行工作的集成電路。在電動(dòng)車輛中,電機(jī)控制器的功能是根據(jù)檔位、油門、剎車等指令,將動(dòng)力電池
2020-07-01 15:29:44
所在行和列的電平。因此各按鍵彼此將互相影響,所以必須將行、列線信號(hào)配合起來(lái)并作適當(dāng)?shù)奶幚恚拍艽_定閉合鍵的位置。結(jié)語(yǔ)本文簡(jiǎn)單介紹了TI16位控制器DSP與液晶顯示模塊及鍵盤模塊之間的接口方案.利用
2019-05-21 05:00:16
我要做基于CPLD的SPI控制器的研究與實(shí)現(xiàn),有沒有會(huì)的人,求教,有什么資料推薦點(diǎn)也行
2013-04-27 14:37:53
本帖最后由 eehome 于 2013-1-5 09:53 編輯
摘要:以先進(jìn)的TMS320F2812型數(shù)字信號(hào)處理器(DSP)為主控制芯片,利用CPLD實(shí)現(xiàn)無(wú)刷直流電機(jī)(BLDCM)的邏輯換
2012-12-21 09:35:24
和網(wǎng)絡(luò)技術(shù)的不斷發(fā)展,運(yùn)動(dòng)控制器已從以單片機(jī)和微處理器作為核心的運(yùn)動(dòng)控制器和以專用芯片(ASIC)作為核心處理器的運(yùn)動(dòng)控制器,發(fā)展到了基于PC機(jī)平臺(tái)的以數(shù)字信號(hào)處理器(DSP)和現(xiàn)場(chǎng)可編程門陣列
2019-09-04 07:10:42
和網(wǎng)絡(luò)技術(shù)的不斷發(fā)展,運(yùn)動(dòng)控制器已從以單片機(jī)和微處理器作為核心的運(yùn)動(dòng)控制器和以專用芯片(ASIC)作為核心處理器的運(yùn)動(dòng)控制器,發(fā)展到了基于PC機(jī)平臺(tái)的以數(shù)字信號(hào)處理器(DSP)和現(xiàn)場(chǎng)可編程門陣列
2019-08-30 08:27:17
基于DSP與FPGA的運(yùn)動(dòng)控制器設(shè)計(jì) 設(shè) 計(jì) 了 一 種 基 于 和 的 四 軸 伺 服 電 機(jī) 運(yùn) 動(dòng) 控 制 器 該 控 制 器 選 用 與 作為 核 心 部 件 針 對(duì) 運(yùn) 動(dòng) 控 制 中
2012-08-11 11:54:11
請(qǐng)教一下,基于DSP和FPGA的嵌入式控制器該如何去設(shè)計(jì)?
2021-05-06 09:16:19
本設(shè)計(jì)基于spartan-6,應(yīng)用于方程式賽車上,實(shí)現(xiàn)對(duì)賽車檔位的智能控制。一.實(shí)現(xiàn)對(duì)賽車發(fā)動(dòng)機(jī)轉(zhuǎn)速和傳動(dòng)軸轉(zhuǎn)速信號(hào)的采集。二.計(jì)算并顯示出當(dāng)前檔位,發(fā)動(dòng)機(jī)轉(zhuǎn)速。二.實(shí)現(xiàn)對(duì)賽車手動(dòng)換擋的控制功能。三
2012-05-12 14:20:58
的邏輯處理和控制算法,能實(shí)現(xiàn)多軸高速高精度的伺服控制。利用DSP與FPGA設(shè)計(jì)運(yùn)動(dòng)控制器,其中DSP用于運(yùn)動(dòng)軌跡規(guī)劃、速度控制及位置控制等功能;FPGA完成運(yùn)動(dòng)控制器的精插補(bǔ)功能,用于精確計(jì)算步進(jìn)電機(jī)或伺服驅(qū)動(dòng)元件的控制脈沖,同時(shí)接收并處理脈沖型位置反饋信號(hào)。那么,我們具體該怎么做呢?
2019-08-06 06:27:00
大家早上好,任何人都可以告訴我為什么DS2411P與賽普拉斯USB控制器配合使用,同時(shí)在下面附帶的原理圖中與xilinx CPLD連接。謝謝,vimala
2019-09-23 13:13:58
本文設(shè)計(jì)的基于CPLD的雙CAN控制器已運(yùn)用于實(shí)際應(yīng)用中,電池管理系統(tǒng)運(yùn)行可靠,CAN報(bào)文收發(fā)平穩(wěn),完全適合混合動(dòng)力汽車的使用。
2021-05-06 06:51:07
硬件電路設(shè)計(jì)上采用DSP 芯片和外圍電路構(gòu)成速度捕獲電路,電機(jī)驅(qū)動(dòng)控制器采用微控制芯片和外圍電路構(gòu)成了電流采樣、過流保護(hù)、壓力調(diào)節(jié)等電路,利用CPLD實(shí)現(xiàn)無(wú)刷直流電機(jī)的轉(zhuǎn)子位置信號(hào)的邏輯換相。
2019-09-30 06:24:13
硬件電路設(shè)計(jì)上采用DSP 芯片和外圍電路構(gòu)成速度捕獲電路,電機(jī)驅(qū)動(dòng)控制器采用微控制芯片和外圍電路構(gòu)成了電流采樣、過流保護(hù)、壓力調(diào)節(jié)等電路,利用CPLD實(shí)現(xiàn)無(wú)刷直流電機(jī)的轉(zhuǎn)子位置信號(hào)的邏輯換相。
2019-10-29 07:18:59
;gt;>點(diǎn)此查看全文
3.全志XR806基于FreeRTOS下部署競(jìng)技機(jī)器人先進(jìn)模糊控制器
前言
很榮幸參與到由全志在線舉辦的XR806開發(fā)板試用活動(dòng)。本人熱衷于各種的開發(fā)板的開發(fā),同時(shí)
2023-12-26 09:17:46
液晶控制器原理是什么?怎么實(shí)現(xiàn)基于CPLD的雙屏結(jié)構(gòu)液晶控制器的設(shè)計(jì)?
2021-06-04 06:09:55
本文在對(duì)異步串行通信協(xié)議進(jìn)行分析的基礎(chǔ)上,根據(jù)實(shí)際工程的需要,對(duì)異步串行通信控制器進(jìn)行了詳細(xì)設(shè)計(jì),并結(jié)合CPLD器件,采用VHDL語(yǔ)言,對(duì)設(shè)計(jì)方案進(jìn)行了實(shí)現(xiàn)和驗(yàn)證,通過最后時(shí)序仿真的波形圖得出
2021-05-28 06:53:11
本文介紹的智能控制單元采用數(shù)字信號(hào)處理器(DSP)及嵌入式實(shí)時(shí)操作系統(tǒng)完成各種數(shù)據(jù)的處理、通信和算法的設(shè)計(jì),而狀態(tài)量的采集和執(zhí)行信號(hào)輸出將由復(fù)雜可編程邏輯器(CPLD)完成,主要是基于CPLD內(nèi)部硬件電路結(jié)構(gòu)的可靠性和對(duì)狀態(tài)采集的實(shí)時(shí)性,該系統(tǒng)可以滿足系統(tǒng)控制實(shí)時(shí)性及可靠性的要求。
2021-05-08 06:44:24
本文在硬件電路設(shè)計(jì)上采用DSP 芯片和外圍電路構(gòu)成速度捕獲電路,電機(jī)驅(qū)動(dòng)控制器采用微控制芯片和外圍電路構(gòu)成了電流采樣、過流保護(hù)、壓力調(diào)節(jié)等電路,利用CPLD實(shí)現(xiàn)無(wú)刷直流電機(jī)的轉(zhuǎn)子位置信號(hào)的邏輯換相
2021-05-12 06:44:08
本文提出了一種不采用在板處理器而以PC機(jī)微處理器為控制核心的開放式四軸運(yùn)動(dòng)控制器,該運(yùn)動(dòng)控制器采用ALTERA公司的復(fù)雜可編程門陣列(CPLD)EPF6016實(shí)現(xiàn)硬件管理功能,硬件的功能可以通過軟件配置,而應(yīng)用層的功能如運(yùn)動(dòng)軌跡規(guī)劃和伺服控制等均由PC機(jī)完成。
2021-04-15 06:09:21
本文在硬件電路設(shè)計(jì)上采用DSP 芯片和外圍電路構(gòu)成速度捕獲電路,電機(jī)驅(qū)動(dòng)控制器采用微控制芯片和外圍電路構(gòu)成了電流采樣、過流保護(hù)、壓力調(diào)節(jié)等電路,利用CPLD實(shí)現(xiàn)無(wú)刷直流電機(jī)的轉(zhuǎn)子位置信號(hào)的邏輯換相
2019-08-12 08:15:55
和外圍電路構(gòu)成了電流采樣、過流保護(hù)、壓力調(diào)節(jié)等電路,利用CPLD實(shí)現(xiàn)無(wú)刷直流電機(jī)的轉(zhuǎn)子位置信號(hào)的邏輯換相。賽車剎車控制器是由防滑控制器和電機(jī)驅(qū)動(dòng)控制器組成。兩個(gè)控制器都是以DSP芯片為核心。防滑控制器
2017-06-23 10:50:34
一種基于CPLD的移相全橋軟開關(guān)電源數(shù)字控制器的設(shè)計(jì)方案
2021-04-30 06:56:18
飛機(jī)防滑剎車控制器作為飛機(jī)防滑剎車系統(tǒng)的核心部件,其設(shè)計(jì)好壞直接影響到飛機(jī)的安全起飛和安全著陸剎車,系統(tǒng)性能的好壞需要通過測(cè)試設(shè)備來(lái)檢驗(yàn)。我國(guó)對(duì)控制器的研究已有半個(gè)多世紀(jì)的時(shí)間,從機(jī)械-氣壓式到目前
2019-05-06 09:18:16
飛機(jī)防滑剎車控制器作為飛機(jī)防滑剎車系統(tǒng)的核心部件,其設(shè)計(jì)好壞直接影響到飛機(jī)的安全起飛和安全著陸剎車,系統(tǒng)性能的好壞需要通過測(cè)試設(shè)備來(lái)檢驗(yàn)。我國(guó)對(duì)控制器的研究已有半個(gè)多世紀(jì)的時(shí)間,從機(jī)械-氣壓式到目前
2019-05-14 07:00:12
用Xilinx CPLD作為電機(jī)控制器
2008-07-28 15:49:42 50
50 結(jié)合繼電保護(hù)測(cè)試裝置的研制體會(huì),介紹基于DSP 的CPLD 多方案現(xiàn)場(chǎng)可編程配置方法,給出硬件的配置連接、CPLD 配置數(shù)據(jù)的獲取與存儲(chǔ)方法和CPLD 在DSP 控制下的被動(dòng)串行配置過程。設(shè)
2009-04-15 08:50:5529 講述快速器件DSP和慢速器件液晶模塊的接口方法;結(jié)合作者實(shí)際工作的一個(gè)成功應(yīng)用,給出TMS320C32 DSP 與內(nèi)藏T6963C 控制器的液晶模塊通過CPLD 接口的硬件和軟件實(shí)例。
2009-04-16 10:26:4422 結(jié)合繼電保護(hù)測(cè)試裝置的研制體會(huì),介紹基于DSP 的CPLD 多方案現(xiàn)場(chǎng)可編程配置方法,給出硬件的配置連接、CPLD 配置數(shù)據(jù)的獲取與存儲(chǔ)方法和CPLD 在DSP 控制下的被動(dòng)串行配置過程。設(shè)
2009-05-18 14:33:2416 講述快速器件DSP 和慢速器件液晶模塊的接口方法;結(jié)合作者實(shí)際工作的一個(gè)成功應(yīng)用,給出TMS320C32 DSP 與內(nèi)藏T6963C 控制器的液晶模塊通過CPLD 接口的硬件和軟件實(shí)例。關(guān)鍵
2009-05-31 14:27:2222 隨著大功率開關(guān)電源的發(fā)展,對(duì)控制器的要求越來(lái)越高,開關(guān)電源的數(shù)字化和智能化也將成為未來(lái)的發(fā)展方向。本文介紹了一種基于DSP 和CPLD 的移相全橋諧振軟開關(guān)數(shù)字控制器,
2009-06-25 14:47:0548 針對(duì)采用傳統(tǒng)控制率的飛機(jī)防滑剎車系統(tǒng)魯棒性差、機(jī)輪易在低速段出現(xiàn)嚴(yán)重打滑甚至脫胎現(xiàn)象等缺點(diǎn),提出了一種新型控制率——模糊復(fù)合控制律。并matlab6.5/simulink環(huán)境下,對(duì)
2009-07-06 17:17:1815 介紹了基于DSP 芯片的飛機(jī)防滑剎車控制系統(tǒng),該系統(tǒng)利用DSP 強(qiáng)大的處理能力和較高的處理速度,在系統(tǒng)中通過網(wǎng)絡(luò)控制算法,解決了系統(tǒng)中存在的部分非線性問題,提高了自適
2009-07-08 14:48:4250 本文主要介紹數(shù)字信號(hào)處理器(DSP)和復(fù)雜可編程邏輯控制器(CPLD)在遠(yuǎn)動(dòng)終端控制系統(tǒng)中的應(yīng)用。為提高系統(tǒng)的實(shí)時(shí)響應(yīng)性能和信號(hào)處理能力,在硬件上,采用DSP 和CPLD技術(shù),提
2009-08-07 10:36:5311 本文以MAX+PLUSⅡ軟件為開發(fā)平臺(tái),利用CPLD器件設(shè)計(jì)了一種新型彩燈控制器。該控制器具有控制路數(shù)多、功能可擴(kuò)展、圖案可控制等特點(diǎn)。近年來(lái),出現(xiàn)了一系列生命力強(qiáng)、應(yīng)用廣
2009-08-17 10:50:4133 可編程邏輯器件CPLD 體積小功能強(qiáng)大, Verilog HDL 語(yǔ)言簡(jiǎn)練,設(shè)計(jì)思想、電路結(jié)構(gòu)和邏輯關(guān)系清晰,本文著重介紹使用Verilog 設(shè)計(jì)CPLD 實(shí)現(xiàn)雙屏顯示液晶控制器的功能。關(guān)鍵詞: Verilog
2009-08-28 09:14:2713 提出了一種基于CPLD 和專用網(wǎng)絡(luò)芯片的高速網(wǎng)絡(luò)控制器的設(shè)計(jì)方法,并且在LED屏控制中實(shí)現(xiàn)。采用具有TOE的AX11015 芯片實(shí)現(xiàn)網(wǎng)絡(luò)的高速傳輸,CP
2009-09-11 09:24:1615 DSP控制器及其應(yīng)用:DSP控制器是一款針對(duì)于工業(yè)控制而開發(fā)的DSP芯片,是一款32位的高性能單片機(jī)。本書首先概述DSP控制器的發(fā)展過程及其特點(diǎn),接著介紹DSP控制器的總體結(jié)構(gòu),特
2009-10-09 15:43:2926 本文介紹了一種基于DSP TMS320F2812和CPLD EPM7128SQC100的液晶模塊的設(shè)計(jì)與實(shí)現(xiàn)方法。將CPLD作為DSP與液晶模塊之間連接的橋梁,解決了快速處理器DSP與慢速外設(shè)液晶模塊的匹配問題,給
2010-01-20 14:48:1554 CPLD 器件在單片機(jī)控制器中的使用摘要:CPLD 器件與單片機(jī)結(jié)合,可以優(yōu)勢(shì)互補(bǔ),組成靈活的、硬軟件都可現(xiàn)場(chǎng)編程的控制器,縮短開發(fā)周期,適應(yīng)市場(chǎng)需要。結(jié)合實(shí)際工作的經(jīng)驗(yàn)
2010-02-08 09:49:5642 GPIB 控制器芯片是組建自動(dòng)測(cè)試系統(tǒng)的核心,在測(cè)試領(lǐng)域應(yīng)用廣泛。本文擬討論用ALTERA公司的低成本CPLD 來(lái)實(shí)現(xiàn) GPIB 控制器的功能。GPIB 控制器芯片的硬件設(shè)計(jì)主要分為狀態(tài)機(jī)的實(shí)現(xiàn)
2010-07-28 17:16:1222 SPWM(正弦脈寬調(diào)制)多電平疊加變頻技術(shù)計(jì)算復(fù)雜,輸出脈沖路數(shù)多,系統(tǒng)實(shí)時(shí)性要求高。采用單片DSP作為其控制器核心器件,不能滿足控制器實(shí)時(shí)性要求;多片DSP協(xié)同工作,需要交
2010-08-06 16:41:4018 設(shè)計(jì)了一種基于DSP+CPLD構(gòu)架的電能質(zhì)量監(jiān)測(cè)裝置,該裝置利用CPLD產(chǎn)生DSP外圍器件的控制時(shí)序,丈中詳細(xì)介紹了CPLD對(duì)DSP外圍器件的邏輯接口設(shè)計(jì),通過MAX+PLUSII對(duì)CPLD的控制時(shí)序進(jìn)行
2010-08-26 16:06:2031 DSP控制器是一款針對(duì)于工業(yè)控制而開發(fā)的DSP芯片,是一款32位的高性能單片機(jī)。本書首先概述DSP控制器的發(fā)展過程及其特點(diǎn),接著介紹DSP控制器的總體結(jié)構(gòu),特別說(shuō)明DSP控制器多組
2010-12-13 12:52:4766 摘要:以Altera公司MAX700舊系列為代表,介紹了CPLD在DSP系統(tǒng)中的應(yīng)用實(shí)例。該方案具有一定的普遍適用性DSP的速度較快,要求譯碼的速度也必
2006-03-11 17:39:491464 
基于CPLD的鍵盤控制器設(shè)計(jì)由于CPLD的可再編程性質(zhì),可以將同一裝置用于不同的鍵盤和產(chǎn)品,而收到高產(chǎn)量、低成本的效果,同時(shí)也節(jié)約了單片機(jī)的資源以做它用。可再編
2009-10-25 10:19:14968 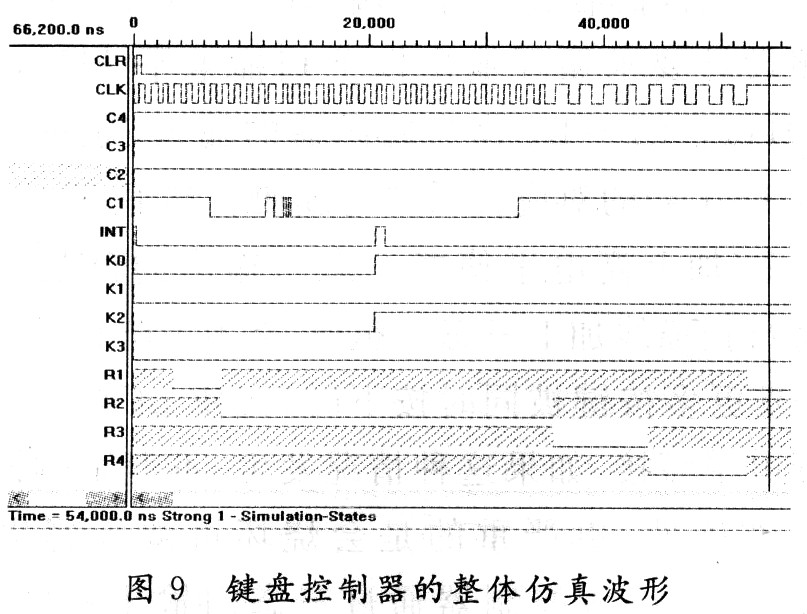
基于DSP的運(yùn)動(dòng)控制器的開發(fā)
運(yùn)動(dòng)控制器是一種用于多種運(yùn)動(dòng)控制場(chǎng)合的上位控制單元,通常采用專業(yè)運(yùn)動(dòng)控制芯片或高速DSP來(lái)控制步進(jìn)電機(jī)或伺服電機(jī)。運(yùn)動(dòng)控制器
2009-12-25 09:44:071964 
基于CPLD的電池管理系統(tǒng)雙CAN控制器的設(shè)計(jì)
本文針對(duì)整車對(duì)電池管理系統(tǒng)提出雙CAN通信的要求,設(shè)計(jì)了由CPLD、TMS320LF2407與SJA1000構(gòu)成的雙CAN控制器。文中介紹了其硬件電
2010-01-12 09:51:37816 
本文在硬件電路設(shè)計(jì)上采用DSP 芯片和外圍電路構(gòu)成速度捕獲電路,電機(jī)驅(qū)動(dòng)控制器采用微控制芯片和外圍電路構(gòu)成了電流采樣、過流保護(hù)、壓力調(diào)節(jié)等電路,利用CPLD實(shí)現(xiàn)無(wú)刷直流電機(jī)
2010-07-09 11:06:50998 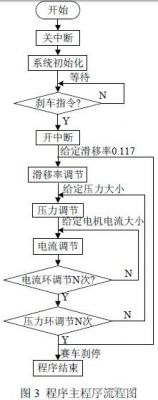
由于種種原因,剎車油泄勁漏、缺少時(shí),汽車剎車失靈,容易發(fā)生故障。國(guó)外汽車幾乎都設(shè)這類控制器
2010-08-30 19:47:241417 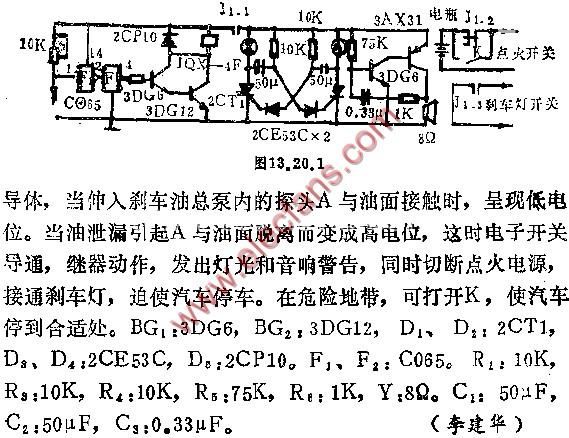
關(guān)于DSP控制器的介紹及其應(yīng)用分析。
2011-10-21 18:08:1856 文章介紹了一種基于CPLD的TFT-LCD控制器的設(shè)計(jì)和實(shí)現(xiàn)方法。增加片外SRAM,以提供顯示緩存。并使用CPLD實(shí)現(xiàn)兩大主要功能,一是產(chǎn)生TFT-LCD要求的時(shí)序信號(hào),二是協(xié)調(diào)TFT-LCD和MCU對(duì)SRAM的讀寫
2011-12-27 15:11:4875 賽車剎車系統(tǒng)一個(gè)重要部分,其中剎車控制器是系統(tǒng)的核心。本文在硬件電路設(shè)計(jì)上采用DSP 芯片和外圍電路構(gòu)成速度捕獲電路,電機(jī)驅(qū)動(dòng)控制器采用微控制芯片和外圍電路構(gòu)成了電流采樣
2012-05-31 10:32:34921 
本文的創(chuàng)新點(diǎn)在于利用DSP的強(qiáng)大數(shù)據(jù)處理功能和CPLD可編程特點(diǎn),設(shè)計(jì)了具有數(shù)字化、智能化、通用性好的開關(guān)電源數(shù)字控制器,使得應(yīng)用該數(shù)字控制器的開關(guān)電源具有很高的響應(yīng)速度,
2013-01-07 11:32:572240 
基于DSP的多軸運(yùn)動(dòng)控制器的研究與設(shè)計(jì)。
2016-03-29 14:11:486 基于DSP_CPLD的開關(guān)磁阻電機(jī)的控制器設(shè)計(jì),有興趣的同學(xué)可以下載學(xué)習(xí)
2016-04-26 17:53:4637 隨著低功耗 CPLD 的出現(xiàn),低功耗電子產(chǎn)品設(shè)計(jì)人員現(xiàn)在有新的選擇來(lái)實(shí)現(xiàn)以前由微控制器完成的多種功能。本白皮書討論什么時(shí)候適合采用 CPLD 來(lái)替代微控制器,什么時(shí)候可以采用 CPLD 作為微控制器的輔助器件。
2017-09-12 14:04:336 基于DSP_CPLD的四電動(dòng)舵機(jī)伺服控制器設(shè)計(jì)
2017-10-20 08:24:044 ,進(jìn)而影響賽車的整體性能。本文設(shè)計(jì)了賽車全電防滑剎車控制器的硬件和軟件,最后研究了適合于賽車剎車的控制律。 2 系統(tǒng)硬件電路設(shè)計(jì) 本賽車剎車控制器是由防滑控制器和電機(jī)驅(qū)動(dòng)控制器組成。兩個(gè)控制器都是以DSP芯片為核心。防
2017-10-26 15:22:392 1 運(yùn)動(dòng)控制器硬件結(jié)構(gòu) 本運(yùn)動(dòng)控制器的硬件結(jié)構(gòu)主要分為如下幾個(gè)模塊:DSP+CPLD 主控模塊,包括 DSP 核心 模塊和 CPLD 驅(qū)動(dòng)與擴(kuò)展模塊;通信接口模塊,包括 PCI 總線、USB 總線
2017-11-03 10:30:472 為了使汽車剎車燈給后車提供剎車深度的信息,根據(jù)最新實(shí)施的國(guó)家標(biāo)準(zhǔn)選裝緊急制動(dòng)指示裝置要求,采用單片機(jī)+加速度傳感器的模式,設(shè)計(jì)了一種基于減速程度的剎車燈控制器將減速度分為緊急剎車,中度剎車和輕度剎車
2017-11-14 17:51:0912 剎車控制器是由防滑控制器和電機(jī)驅(qū)動(dòng)控制器組成。兩個(gè)控制器都是以DSP芯片為核心。防滑控制器主要是以滑移率為控制對(duì)象,輸出給定的剎車壓力,以 DSP芯片為CPU,外加賽車和機(jī)輪速度信號(hào)調(diào)理電路等。電機(jī)
2018-06-27 11:29:00911 
本文在硬件電路設(shè)計(jì)上采用DSP 芯片和外圍電路構(gòu)成速度捕獲電路,電機(jī)驅(qū)動(dòng)控制器采用微控制芯片和外圍電路構(gòu)成了電流采樣、過流保護(hù)、壓力調(diào)節(jié)等電路,利用CPLD實(shí)現(xiàn)無(wú)刷直流電機(jī)的轉(zhuǎn)子位置信號(hào)的邏輯
2018-08-11 10:46:001167 
針對(duì)伺服系統(tǒng)控制的特點(diǎn)和要求,介紹了一種基于DSP和CPLD的開放式多軸伺服運(yùn)動(dòng)控制器軟。硬件設(shè)計(jì)。以高速DSP作為該系統(tǒng)核心,利用CPLD完成外圍信號(hào)處理以及邏輯和時(shí)序控制。借鑒C+語(yǔ)言類”結(jié)構(gòu)
2019-05-29 17:09:278 本文開發(fā)的開放式運(yùn)動(dòng)控制器以PC機(jī)為平臺(tái),完成坐標(biāo)變換、軌跡規(guī)劃、粗插補(bǔ)運(yùn)算等控制指令的設(shè)置和發(fā)送,同時(shí)可以實(shí)時(shí)顯示當(dāng)前伺服系統(tǒng)的運(yùn)動(dòng)位置、速度和電機(jī)狀態(tài)等參數(shù)。運(yùn)動(dòng)控制器以DSP芯片作為核心處理器
2020-09-23 08:44:001388 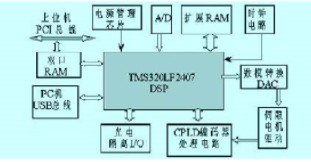
DSP控制器原理及其應(yīng)用講解。
2021-03-25 09:37:4715 DSP控制器原理與應(yīng)用說(shuō)明。
2021-03-30 09:50:5585 基于DSP+CPLD的低壓斷路器群組控制.pdf
2022-02-07 11:18:314
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論