機器人框圖中央控制板中央控制板采用MM32F103xCxE系列大容量高性能MCU,RAM最大128K,FLASH最大512K,多達8個UART接口,另外還具有CAN、USB OTG、SPI、I2C等豐富
2019-02-22 21:27:49
本菜鳥剛學機器人控制,對于兩關節機器人,實現既定的末端軌跡,軌跡規劃已完成,但是程序的延時不準確,導致最終軌跡混亂,求大神破?
2015-04-29 16:21:23
度,并配有扭轉傳感器;共有 51 個關節,可以完成高度靈活的運動,,能夠靈敏地進行操作和交互運動。該機器人的雙手可以嫻熟地操作物體,例如搬移木箱或者沏茶。后者需要復雜的動作協調性。機器人必須一只手抓住
2015-01-21 17:11:24
,檢測的信號是數字信號,轉速較高。但是這種扭矩傳感器體積較大,低轉速時的性能不理想,因此應用已不是很廣泛。 另外,高性能無線扭矩傳感器較為常用,它與無線通信技術結合在一起,實現了數據的無線傳輸。 扭矩
2018-11-07 10:39:36
。3、采用高精度的穩壓電源。二、電位計式扭矩傳感器電位計式扭矩傳感器主要可以分為旋臂式、雙級行星齒輪式、扭桿式。其中扭桿式測量結構簡單、可靠性能相對比較高,在早期應用比較多。扭桿式扭矩傳感器主要由扭桿
2020-04-30 09:39:21
機器人關節是機器人各個零部件之間發生相對運動的機構。關節之中,單獨驅動的為主動關節,反之稱為從動關節。機器人關節模組通常采用超聲波電機、伺服電機、諧波減速器、VR減速器、行星齒輪箱電機等。機器人關節
2021-05-27 11:26:11
`在論壇看到了那個波士頓動力公司的斑點 獵豹 大狗 野貓 這幾種軍用機器人,也看了那些個測試視頻,他們的那些關節結構是怎樣設計的啊?是液壓還是機械?`
2015-03-09 11:41:04
``說起對工業機器人的性能要求,無非就是“快、準、狠”三字。其實這也就是對機器人關節伺服電機的要求,今天我們就來拆解一下這三字背后的含義。其中“快”、“準”的意思大家都非常好了解,就是要求伺服電機
2016-09-19 21:33:55
遙控器上940nm紅外發射管可以用850nm的代替么?
2021-04-17 08:25:59
`我司經營多款單鍵,雙鍵,四鍵,六鍵等遙控器可按照要求定制可定制各種頻點的遙控器更多款式及要求可定制開發`
2020-05-23 17:01:01
/電動汽車?集成動力總成終端設備組件能夠實現以下優勢:提高功率密度。提高可靠性。優化成本。簡化設計和組裝,并支持標準化和模塊化。高性能集成動力總成解決方案:電動汽車普及的關鍵 閱讀白皮書市場應用現狀實現
2022-11-04 06:20:10
Altera公司近期宣布,開始交付業界第一款高性能28-nm FPGA量產芯片。Stratix V FPGA是唯一使用TSMC 28HP工藝制造的FPGA,比競爭解決方案高出一個速率等級
2012-05-14 12:38:53
在本文章中,我們將展示色散補償方案如何影響系統性能。色散的脈沖展寬效應導致相鄰位周期中的信號重疊。這稱為碼間干擾(ISI)。展寬是距離和色散參數D的函數。色散參數以ps/nm/km為單位,隨光纖
2022-09-16 09:00:14
在本文章中,我們將展示色散補償方案如何影響系統性能。色散的脈沖展寬效應導致相鄰位周期中的信號重疊。這稱為碼間干擾(ISI)。展寬是距離和色散參數D的函數。色散參數以ps/nm/km為單位,隨光纖
2025-03-20 18:20:10
,RoboMaster 針對機器人競賽和日常設備應用,正式發布 RoboMaster M2006 動力系統,解決小體積、高性能的需求。 RoboMaster M2006 動力系統 RoboMaster
2018-05-11 10:26:58
kg 為單位設置機器人前端重量(工件重量+工具重量)。但是,當設置的機器人為 YK120XG、YK150XG、YK180XG、YK220X 時,以 0.1kg 為單位設置。最大值取決于所設置的機器人
2021-11-05 17:51:40
項目名稱:PM2.5物聯網檢測儀和航模遙控器+圖傳試用計劃:這個板子有wifi,自己以前做了個PM2.5檢測儀,但是用的是stm的MCU,數值顯示和上傳到家庭局域網很不方便,用的是lt8910透傳到
2016-12-26 17:55:58
力轉換成電量,先測出電量值轉換成力的大小,再計算出相應扭矩值。 圖4 振弦式扭矩測量原理圖 優點是可以直接利用傳動軸作為扭軸進行測量;采用頻率信號傳輸方式,抗干擾性能好;傳感器部分與測力軸分開
2021-03-02 15:00:44
材料的邊界及其下方的鬼影判斷,我們制備的樣品寬度為一個鰭片左右,約5——10nm)的樣品來觀察鰭片上方磊晶的SiGe結構。 圖5:(a)i8與(b)S8平行鰭片方向柵極與SiGe結構;(c)i8
2018-06-14 14:25:19
的移動中,豎直向上移動對驅動力的要求最高,此時驅動力不但要完全克服重力,還要克服吸盤與壁面的滑動摩擦力。設機器人的重力為20 N,吸盤與玻璃壁面的摩擦力也為20 N(以最大值計算,實際上達不到),則
2012-12-20 10:29:35
電機為什么會有最大扭矩?也就是說電機當達到最大扭矩的時候,轉速會停下來?
2016-01-26 11:30:52
“如果飛控被稱為無人機的大腦,那么圖傳系統就可以比做無人機的“眼睛”。”深圳優鷹科技蔡英杰博士曾在接受宇辰網專訪的時候這樣形容無人機的圖傳系統。最近,一篇《摘掉有色眼鏡來聊一聊:為什么億航VR眼鏡
2019-08-09 08:20:07
半導體應變計在動力機械扭矩測量中的應用介紹了一種高穩定度、高可靠性、低成本、安裝方便的扭矩測量系統,以解決動力機械高速旋轉軸上的小扭矩、小應變的測量問題。在實際生產和實驗中,經常遇到扭矩測量
2009-12-14 11:49:54
機器人結構本體能夠有效承受運動沖擊、模擬四足動物運動的先決條件;高性能驅動器為機器人運動提供足夠動力,行走穩定性控制負責協調多個關節驅動器,實現機器人穩定行走;強化學習則在復雜環境感知決策、不確定模型
2021-09-15 06:54:01
從工藝選擇到設計直至投產,設計人員關注的重點是以盡可能低的功耗獲得最佳性能。Altera在功耗和性能上的不斷創新,那其28nm高端FPGA如何實現功耗和性能的平衡?具體有何優勢?
2019-09-17 08:18:19
如何利用ESP32實現遠程圖傳?
2022-01-19 07:36:33
想學習下實時圖傳技術,希望大神不吝賜教給點資料指導指導~~~~~~~
2019-10-28 22:03:39
說起對工業機器人的性能要求,無非就是“快、準、狠”三字。其實這也就是對機器人關節伺服電機的要求,今天我們就來拆解一下這三字背后的含義。其中“快”、“準”的意思大家都非常好了解,就是要求伺服電機
2018-10-15 10:16:14
隨著機器人性能的提升和價格的下降,以“自動化設備+工業機器人操作”取代傳統的“自動化設備+人工操作”的生產模式將成為PCB行業轉型發展的趨勢。
2019-10-10 06:54:02
機器人1、機器人本體1)具有6個自由度,串聯關節型工業機器人;2)重復定位精度:±0.01mm;3)承重能力:3kg;4)水平到達距離: ≥580mm;5)重量: ≥27kg;6)各軸運動范圍J1軸≥±180J2軸≥-155°/+5°J3軸≥-25°/+240°J4軸≥±180°J5
2021-07-01 11:06:26
軸電機布置在小臂后方,通過同心軸+傘齒輪/同步帶的方式傳動到手腕的方式,以KR5為例: 三個電機的動力通過同心軸傳到手腕,腕部結構如下: 放大圖: 總結近幾年KUKA新推出的agilus系列機器人
2018-11-01 11:08:12
說起對工業機器人的性能要求,無非就是“快、準、狠”三字。其實這也就是對機器人關節伺服電機的要求,今天我們就來拆解一下這三字背后的含義。其中“快”、“準”的意思大家都非常好了解,就是要求伺服電機
2018-10-19 10:47:11
。2.4GHz全高清無人機圖傳系統是主流在無人機的視頻傳輸方面,高配的圖傳系統已經可實現5km/1080P30fps傳輸,但這是眾多國內娛樂無人機廠商還沒有做到的。一般的做法是在云臺搭載相機,高空拍攝再飛回
2017-04-07 11:17:23
,頻率輸出等功能。交流電流全范圍內輸出頻率在20Hz-3KHz內可調。機器采用軍工級32位ARM處理器,進行數據信號處理控制,采用7寸彩色觸摸屏,人性化界面極大方便操作,采用本公司特有的高壓直放技術
2016-06-16 12:22:24
最大密度子圖
2020-11-11 06:17:11
``隨著國內汽車工業的發展,新款車型層出不窮,汽車臺架及道路測試越來越重要。扭矩是電動機、發動機性能的重要指標,各個車廠都在對兩驅、四驅車輛的輸出軸扭矩、單邊驅動軸的扭矩及四個驅動輪扭矩進行測量
2018-09-29 15:10:00
應用,也為無人機/機器人/的微型化和智能化的實現提供了可能經典方案:4K運動相機 無 人 機 圖 傳 編碼板卡 變焦相機聯 系 人:黃先生聯系電話:***
2017-01-20 14:19:31
應用,也為無人機/機器人/的微型化和智能化的實現提供了可能經典方案:4K運動相機 無 人 機 圖 傳 編碼板卡 變焦相機聯 系 人:黃先生:聯系電話:***`
2017-01-20 14:11:19
AI-ISP提升低噪度的圖像效果
更低的功耗,更長的續航
先進制程,保證高性能的同時帶來更低功耗
低功耗待機模式(3.8V @0.5mA左右)
更高的擴展能力
支持PCle接口WiFi,圖傳更快速
云端
2024-03-12 13:45:25
電機評價功能可測量扭矩和轉速 高性能功率分析儀WT1800: 最多可配置6個輸入單元; 能以5MHz(U/I)寬帶寬同時測量DC-DC轉換器/逆變器的輸入和輸出; 電機
2018-09-23 20:13:32
了功耗,而且沒有犧牲最大性能。消除難點通過使用晶體管來提高性能在20 nm SoC是非常關鍵的,原因在于:在模塊級,20 nm芯片并不比相應的28 nm快很多。從公開的信息看,這還不是很明顯。例如
2014-09-01 17:26:49
■ 實驗背景在 兩軸機械臂+機械爪整體控制板設計與機械爪控制調試 的基礎上對于機械臂各關節進行了 雙關節機械臂+機械爪運動控制 ,其中存在的主要問題還是肩關節運動不平穩的情況。▲ 機械臂肩部運動
2021-07-08 09:18:06
`高爾夫嘉旅280TSI,該車搭載著型號為EA211-CSS的1.4L渦輪增壓發動機,其最大功率為110KW(150PS)/5000-6000rpm,最大扭矩為250NM/1750-3000rpm
2020-05-18 17:37:08
【來源】:《電子設計工程》2010年02期【摘要】:<正>賽靈思公司與聯華電子共同宣布,采用聯華電子高性能40nm工藝的Virtex-6FPGA,已經完全通過生產前的驗證
2010-04-24 09:06:05
電機加蝸輪蝸桿結構、氣動方案作為機器人手指方案,這些方案普遍存在噪音、精度不準、體積大、堵轉燒機、斷電失效等情況。<span]超聲電機作為核心驅動部件作為機器人手指關節部件,可以做到靜音
2020-09-28 14:08:22
的信號是數字信號,轉速較高。但是這種扭矩傳感器體積較大,低轉速時的性能不理想,因此應用已不是很廣泛。 另外,高性能無線扭矩傳感器較為常用,它與無線通信技術結合在一起,實現了數據的無線傳輸。 扭矩
2018-11-02 13:58:24
的最大扭矩,扭矩與速度曲線;電機運行的精度和可重復性(不使用傳感器和閉環控制)。當然,電機選擇還涉及許多其他性能因素,還有尺寸,重量和成本因素。對于幾乎所有小到中等大小的機器人執行器,為執行器供電的最常
2019-03-12 15:52:12
量程0~3/5/10/20/30/50/100/200/500NM供電電壓±15VDC(適用頻率信號輸出)、24VDC(適用電壓或電流信號輸出)扭矩信號515kHz(幅值12V,零點10kHz)、可選
2022-09-14 11:58:33
聲波遙控器電路圖
2009-05-18 10:57:02 18
18 簡易實用的遙控器電路圖
2009-05-19 09:56:3221 微型遙控器電路圖
2009-05-19 10:01:161087 分析了多種測量旋轉軸扭矩方法的原理和特點, 并重點介紹了利用行星齒輪機構的動力分流特點, 將旋轉軸扭矩的測量問題轉化成測量固定軸靜態扭矩問題的方法及其扭矩分析和傳
2009-06-29 10:31:3723 傳火管輸出性能測試系統:目的:傳火管各個噴口輸出性能一致性測試。一致性指標:火焰溫度、火焰沖量、管殼壓力分布、管殼溫度分布。1 技術性能和參數(1)測量傳火
2009-07-23 22:49:195 RJS-II系列關節模組是泰科智能推出的一款基于模塊化理念設計、輕巧、高精度的協作機器人關節,一體化集成的RJS-II不僅結構尺寸更小,性價比更高,為您解決機器人在更多復雜環境中的適應性和穩定性
2023-04-17 15:02:00
RJS-II系列關節模組是泰科智能推出的一款基于模塊化理念設計、輕巧、高精度的協作機器人關節,一體化集成的RJS-II不僅結構尺寸更小,性價比更高,為您解決機器人在更多復雜環境中的適應性和穩定性
2023-04-17 15:07:26
深圳泰科智能TB6-R5協作機器人是一款靈活的輕型工業協作機器人,具有精巧的機械結構設計。這款協作機器人有效負載為5KG,自重僅為23KG,重復定位精度可達±0.05mm,適應多樣性、柔性生產
2023-04-17 16:12:03
RJU系列關節模組——面向商業、生活服務類應用 一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統外形的機器人關節,而是一款能夠給機器人更多設計空間,和應用領域的關節,客戶
2023-04-17 16:25:29
RJU系列關節模組——面向商業、生活服務類應用 一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統外形的機器人關節,而是一款能夠給機器人更多設計空間,和應用領域的關節,客戶
2023-04-17 17:40:55
產品優勢專注機器人關節研發,RJS系列關節模組具有定位精度高、性能可靠等特點。 模塊化設計RJS關節模組集成無框電機、驅動器、諧波減速器、編碼器、制動器于一體,結構小巧緊湊,6軸RJS關節
2023-04-18 14:04:34
機器人關節電機是專業為機器人關節設計研發生產。電機既有中空大孔徑,能保證關節模組完美融合的組合, 電機的定轉子機構緊湊,轉子采用了高性能稀土永磁材料,此系列電機轉矩脈動極低,易于速度控制和精確
2023-04-18 17:35:19
RJU系列關節模組一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統外形的機器人關節,而是一款能夠給機器人更多設計空間,和應用領域的關節,客戶可根據自身產品方向,自由定位
2023-04-19 10:48:11
RJU系列關節模組一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統外形的機器人關節,而是一款能夠給機器人更多設計空間,和應用領域的關節,客戶可根據自身產品方向,自由定位
2023-04-19 10:53:03
RJS-II系列關節模組是泰科智能推出的一款基于模塊化理念設計、輕巧、高精度的協作機器人關節,一體化集成的RJS-II不僅結構尺寸更小,性價比更高,為您解決機器人在更多復雜環境中的適應性和穩定性
2023-04-19 14:54:26
RJU系列關節模組——面向商業、生活服務類應用一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統外形的機器人關節,而是一款能夠給機器人更多設計空間,和應用領域的關節,客戶可根據自身
2023-04-19 15:23:14
機器人關節電機是專業為機器人關節設計研發生產。電機既有中空大孔徑,能保證關節模組完美融合的組合, 電機的定轉子機構緊湊,轉子采用了高性能稀土永磁材料,此系列電機轉矩脈動極低,易于速度控制和精確
2023-04-20 10:07:10
高性能紅外遙控開頭電路圖
2007-12-12 22:44:10 580
580 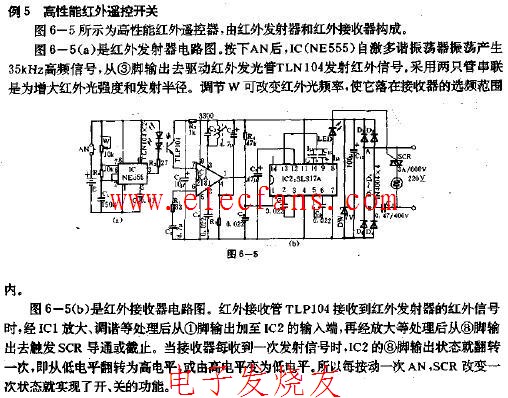
扭矩傳感器的研究和發展;扭矩傳感器原理與應用、扭矩傳感器的分類
摘要:本文介紹了應用于電動助力轉向系統(EPS)中扭矩傳感器的種類,包括電位
2008-01-07 10:04:083116 
什么是扭矩
扭矩:扭矩是使物體發生轉動的力。發動機的扭矩就是指發動機從曲軸端輸出的力矩。在功率固定的條件下它與發動機轉速成反比關系,轉速越快扭矩越小
2008-01-07 10:07:4427920 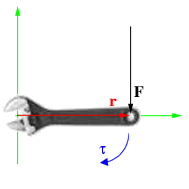
扭矩測量
扭矩由力和力臂的乘積來定義,單位是Nm。
2008-01-07 12:52:493903 
HJL系列行星滾柱絲杠線性關節模組? 專為人形機器人應用研發,提供定制化服務? 集行星滾柱絲杠、電機、編碼器、拉壓力傳感器于一體? 強大推力,性能強勁,穩定可靠? 精巧結構設計,整體輕量化程度進一步
2025-02-21 14:55:54
? 強大扭矩,性能強勁,穩定可靠? 多種規格,自由組裝人形機器人,大幅縮短開發周期 人形機器人關節人形機器人關節模組人形機器人關節參數
2025-02-21 14:59:52
MJA-H系列輕量化關節模組? 專為輕量型人形機器人手臂應用研發,提供定制化服務? 集諧波減速器、電機、編碼器、驅動器于一體? 定位精度高,可靠性穩定性大幅提升? 精巧
2025-02-21 15:04:19
高性能紅外遙控開關電路圖
2009-05-27 14:26:44477 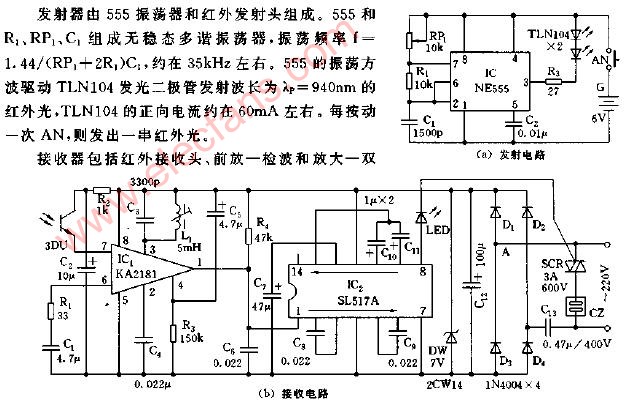
紅外遙控器電路圖
2009-05-27 14:33:502843 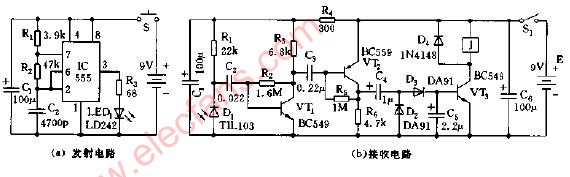
傳臺積電取消32nm工藝
據稱,全球第一大半導體代工廠臺積電已經完全取消了下一代32nm工藝,算上一直不順利的40nm工藝真可謂是屋漏偏逢連夜雨了。
&n
2009-11-27 18:00:09663 DIY:三大自制WiFi天線 30KM不是夢(圖文)
2017-02-08 11:36:20118 動態扭矩:就是在裝配過程中工具或設備所實時顯示的扭矩,是螺栓克服動態摩擦所達到的扭矩。一般定扭矩工具和擰緊機預先設置的扭矩值也是動態扭矩值。靜態扭矩:在被擰緊的螺栓停止后,再繼續沿著擰緊方向克服靜態摩擦所達到的最大扭矩為靜態扭矩。一般我們使用指針式手動扳手測量的扭矩峰值為靜態扭矩。
2017-11-09 11:09:5457796 介紹了一種以STM32為核心的嵌入式移動機器人無線遙控器的設計與實現。遙控器硬件部分包括電源模塊、主控模塊、LCD顯示模塊、無線數傳模塊、按鍵模塊;軟件上采用嵌入式C/OS-Ⅱ來實現統一任務調度
2017-11-30 04:24:23525 大疆創新在深圳發布了“DJI FPV數字圖傳系統”,該套產品涵蓋 FPV 飛行眼鏡、圖傳模塊、相機和遙控器。
2019-12-17 10:51:144028 PD-100“黑蜂”代表微型無人機監控和偵察的很高水平。它的遙控器可快照圖像和實時視頻的傳輸,與黑羊團隊的一體化遙控器TBS Tango設計異曲同工,都具備遙控圖傳一體化的操控體驗。
2020-09-26 11:58:175920 作為行業領先的協作機器人關節模組供應商, RJSIIZ系列機器人關節模組是泰科智能專為3-20Kg以下協作機器人而設計,高度集成了包括無框力矩電機、低壓直流驅動器、諧波減速機、制動器和雙反饋裝置。尺寸小,符合協作機器人緊湊、靈活的設計特點。
2021-04-15 10:58:042695 KOYUELEC光與電子ASW5480: 高性能、低功耗Type-C音頻+數傳+保護專家
2022-05-07 11:36:341182 機器人的高性能連接
2023-01-03 09:45:13605 GRANDMICRO有容微:ASW5480: 高性能、低功耗Type-C音頻+數傳+保護專家
2023-03-02 11:01:39749 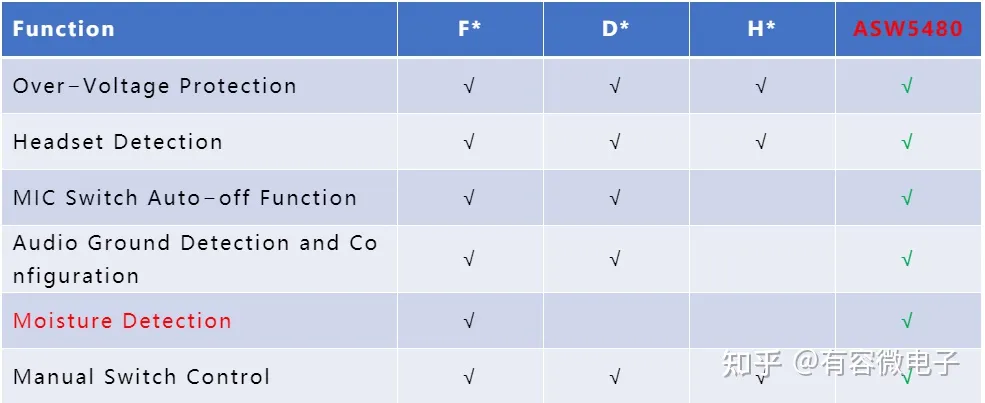
扭矩理論上是越大越好,扭矩大了勁大提速快。但最大扭矩和最大功率,是發動機輸出特性的代表數據,只是反應了發動機本身的技術特點,實際是要相應的配合不同功能的汽車,來發揮最大的作用。例如啟動時或在山區行駛時,扭矩越高汽車運行的反應便越好。
2023-03-27 14:24:1912231 ,能夠測定電機的空載扭矩、阻力扭矩和啟動扭矩等性能指標。
3. 數字扭矩傳感器:用于實時測量電機的扭矩輸出,具有高精度、高穩定性和快速響應的特點。
2023-03-27 14:47:442091 機器人關節模組常見問題答疑
2023-04-20 14:51:031114 
TB7-R3協作機器人是泰科智能在高壓的市場環境下打造的超高柔性協作機器人,也是完全采用自主研發的最新款不帶外殼關節模組(RJSIIZ系列關節模組)搭建而成。該協作機器人末端有效負載3kg,工作半徑
2023-04-20 15:02:01822 
作為行業領先的協作機器人關節模組供應商, RJSIIZ系列機器人關節模組是泰科智能專為3-20Kg以下協作機器人而設計,高度集成了包括無框力矩電機、低壓直流驅動器、諧波減速機、制動器和雙反饋裝置。尺寸小,符合協作機器人緊湊、靈活的設計特點。
2023-04-20 15:02:391063 
深圳泰科智能機器人作為國內為數不多的關節模組研發及生產廠家,一直致力于為企業提供更多協作機器人關節模組解決方案。自主研發的MJX系列關節模組,高度集成模塊化、緊湊型設計,有多種規格尺寸。整個系列關節
2023-07-10 10:45:41844 
泰科機器人幾年前就研判人形機器人賽道將會成為熱點,決定研發人形機器人適用的關節模組,經過艱苦的技術攻堅,泰科機器人推出了一系列適用于仿生機器人的輕量化大扭矩一體化關節:MJX系列和DJB系列關節模組,助力客戶快速定制開發各類需求的機器人。
2023-11-22 11:12:34945 
德晟智能推出的DS-R003B是一款35KG級的高性能微型伺服器,配備高精度強力金屬齒輪,滾齒工藝一體成型,在7.4V的電壓環境下,最大輸出扭矩可達35kgf.cm。半鋁框金屬外殼,使舵機輕量化的同時,還增強了散熱性能。
2023-12-18 14:10:111226 
堵轉扭矩和額定扭矩是涉及機械和工程領域的兩個關鍵概念。在理解這兩個概念之前,我們需要先了解一下扭矩的概念。 扭矩是用來描述施加在物體上的“旋轉力”的物理量,其公式可以表示為: T = F × r
2024-01-16 14:49:284864 德晟智能推出的DS-S015M是一款15KG級的高性能微型伺服器。采用高強度尼龍外殼,在輕量化的同時提供了較強的抗沖擊性能。配備高精度銅齒,滾齒工藝一體成型,有效防止掃齒崩齒現象。在6V的電壓環境下,S015M的最大輸出扭矩可達15kgf.cm,可按需定制。
2024-02-26 15:40:101302 
在快速發展的機器人技術領域,傳感器的性能直接關系到機器人的精準度、可靠性和智能化水平。中航電測憑借其在傳感器領域的深厚積累與前沿創新,為機器人產業量身打造了多款高性能傳感器。這些傳感器不僅提升
2024-11-29 15:24:18445 
伴隨工廠對無人化和節約勞動力需求的不斷增長,對垂直關節機器人等工業機器人的需求也相應增加。為了實現對此類機器人的功能需求,需要配備控制多軸電機的實時性能與多軸電機控制功能、用于機械臂軌跡規劃運算與ROS等中間件運行的高性能應用處理能力、以及用于連到工廠內部網絡的工業以太網。
2024-12-29 17:15:48601 江蘇雷利生產的10mm空心杯電機(扭矩密度35mN·m/kg)是一種高性能微型電機,適用于需要輕量化、高響應速度和精密控制的場景。以下是關于該電機的詳細分析: 1. 空心杯電機核心特點 結構優勢
2025-03-27 18:44:08563
 電子發燒友App
電子發燒友App











 工商網監
工商網監
評論