主動磁懸浮軸承(簡稱磁軸承)系統主要由被懸浮物體(即轉子)、位移傳感器、控制器和功率放大器等組成。位移傳感器檢測轉子偏移參考點(平衡位置)的位移量,控制器將檢測到的位移變換成控制信號,功率放大器
2020-11-24 10:37:45 1713
1713 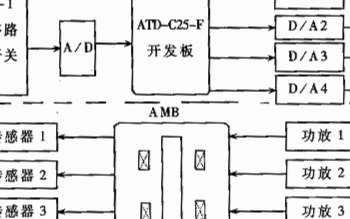
制的實現,然后分別介紹片內外設的結構、原理及使用方法,以及DSP控制器的指令系統;最后給出2個應用實例。《DSP控制器及其應用》可供從事控制系統、通信系統、網絡設備、儀器儀表、家用電器等相關領域的廣大科技人員和教師閱讀參考,也可作為相關專業研究生和本科生的教材。
2020-09-07 10:10:15
有大神教一下小白嗎???有個難題一直困擾著,怎么可以實現對dsp控制系統進行數據采集,比如:控制手柄按一下正轉、反轉,怎么能讓電腦顯示你按的是正反轉,電機也是否是正反轉。
2017-05-27 10:50:41
大神,有沒有關于磁懸浮的資料么
2015-07-31 19:08:55
磁懸浮列車簡介maglev train;magnetic suspension train 磁懸浮系統,它是由轉子、傳感器、控制器和執行器4部分組成,其中執行器包括電磁鐵和功率放大器兩部分。假設在
2011-06-18 16:17:18
慣性執行機構工作原理是什么?慣性執行機構分為哪幾類?磁懸浮慣性執行機構有哪些優點?磁懸浮慣性執行機構分為哪幾類?磁懸浮慣性動量輪是由哪些部分組成的?磁懸浮慣性動量輪各部分的功能有哪些?
2021-07-13 08:30:22
磁懸浮技術基本原理是什么?磁懸浮列車是什么?
2021-03-18 08:14:56
磁懸浮控制原理有人知道不,分享分享
磁懸浮玩具的控制原理有人知道嗎?
2023-06-14 07:40:13
。常用E檔和F檔,檔位的不同代表輸出電壓的不同。霍爾傳感器HW-101A目前常用于磁懸浮,磁懸浮地球儀器,電機驅動無刷電機控制板,線性位置檢測,磁頭感應器。
2018-01-24 16:01:38
磁懸浮科普介紹磁懸浮技術(簡稱EML技術或EMS技術)是指利用磁力克服重力使物體懸浮的一種技術。磁懸浮列車是由無接觸的磁力支承、磁力導向和驅動系統組成的新型交通工具,主要有超導電動型磁懸浮列車、常
2021-08-31 06:49:11
申請理由:之前用PIC單片機控制磁懸浮平臺,現計劃用ARM芯片完成磁懸浮平臺控制,基本完成后控制磁懸浮電機項目描述:磁懸浮平臺過度到磁懸浮電機,爭取在惡劣工況下正常工作
2015-10-21 09:19:53
會受一定的影響。?本文所提出的基于DSP+FPGA的控制系統方案,利用FPGA的容量大、可編程實現很多功能,結合DSP具有高速的信息處理能力的特點,使得本控制系統非常簡潔,結構靈活,通用性強,系統也易于維護和擴展。該方案基于軟件無線電的思想,是采用通用平臺的設計。?
2019-07-29 06:08:47
先進的馬達控制系統可實現馬達與硅芯片技術以及軟件的高度集成,以便在提升性能的同時顯著節約成本。先進控制器采用的高級技術可提高性能與馬達驅動的工作特性。基于數字信號處理器 (DSP) 的新型可編程
2012-11-28 15:36:19
基于DSP的高低速CAN總線汽車控制系統設計摘 要 采用TI公司內嵌CAN 2.0B模塊的數字信號處理器TMS320LF2407A作為汽車計算機控制系統中的主控制器并兼作網關,構建高低速CAN總線
2009-10-06 14:57:04
怎樣去開發一個基于PC的采集和控制系統?
2021-05-11 07:02:05
在很多嵌入式控制系統中,系統既要完成大量的信息采集和復雜的算法,又要實現精確的控制功能。采用運行有嵌入式Linux操作系統的ARM9微控制器完成信號采集及實現上層控制算法,并向DSP芯片發送上層算法得到控制參數,DSP芯片根據獲得的參數和下層控制算法實現精確、可靠的閉環控制。
2019-08-19 06:29:34
有人搞過磁懸浮嗎?ARM搞的,求技術經驗。
2013-11-20 21:55:16
下推式磁懸浮制作材料模塊實現L298Nah3503控制器部分更新于2021.9.4材料1.4個線圈2.磁環外徑100mm,內徑60mm3.100*100 mm pcb4.lm324(或其他運放芯片
2022-03-02 06:15:13
內外設集成在一起,DSP成為傳統的微控制單元和多片設計系統的一種理想替代品。在減搖水艙試驗臺架控制系統工作過程中,需要實時修改DSP中控制器參數等變量,因此如何實現PC機與DSP的可靠通信成為一個
2019-06-03 05:00:06
如何實現中斷控制系統的設計?
2022-02-17 07:59:03
基于MITSUBISHI的FX1N-40MR型PLC作為控制器的PLC控制程序與器件實現物料自動控制系統的設計
2021-06-15 06:40:21
運動控制技術是數控機床的關鍵技術,其技術水平的高低將直接影響一個國家裝備制造業的發展水平。目前,多軸伺服控制器越來越多地運用在運動控制系統中,具有較高的集成度和靈活性,可實時完成運動控制過程中復雜
2019-08-06 06:27:00
模糊PID溫度控制系統的硬件電路包括哪幾部分呢?如何去設計一種基于STM32控制器的模糊PID溫度控制系統呢?
2021-12-23 07:08:20
工業控制系統中的常用控制器有哪些?其常用控制器分別有哪些特點以及應用?
2021-07-05 06:48:21
本文在硬件電路設計上采用DSP 芯片和外圍電路構成速度捕獲電路,電機驅動控制器采用微控制芯片和外圍電路構成了電流采樣、過流保護、壓力調節等電路,利用CPLD實現無刷直流電機的轉子位置信號的邏輯換相
2021-05-12 06:44:08
怎么設計一個基于FPGA的磁浮軸承控制系統?
2021-04-30 06:30:53
運動控制系統被廣泛地運用于各個領域。傳統的運動控制系統設計有基于PC的中央控制方式和基于微控制器的嵌入式控制方式等。
2019-08-28 07:00:52
國內普遍采用TM320系列的DSP器件作為永磁同步電機控制系統的主控制器,因CPU負載過重導致系統實時性降低的問題日益顯著。采用具有并行工作特性的FPGA器件作為主控制器能夠提高系統實時性。因此,我們具體該怎么設計呢?
2019-08-14 08:02:56
本文采用Verilog FPGA設計懸掛運動控制系統的控制器,通過輸入模塊傳送控制參數,采用HDL語言編程實現的控制算法,驅動步進電機,對懸掛運動物體進行精確的控制。
2021-05-06 07:11:03
各位大俠:我現在急需要一可懸浮450克的磁懸浮地球儀電路原理圖。有的話我感激不盡謝謝!
2016-12-12 16:45:57
本文首先介紹了并聯型APF的系統結構和工作原理,然后討論了基于DSP+CPLD的全數字化控制系統的實現方案,并對該控制系統的硬件電路和軟件系統設計進行了研究,最后給出了實驗波形,驗證了控制策略的有效性。
2021-04-22 06:16:02
求大神msp430g2launch pad 控制的磁懸浮裝置設計 完全不懂怎么弄?最好有源代碼
2016-10-18 20:59:48
貼片機的控制系統由機器主控制器、內嵌式PC、運動控制卡、圖像卡和I/O接口板等組成,實現了坐標和外圍I/O接口控制,保證運動的準確性和快速響應性。VME箱是整個控制系統的核心,實現整機數據的采集
2018-09-07 16:12:05
需要磁懸浮高度可以達到20cm,載重2kg以上的磁懸浮裝置,誰能做?
2020-09-11 06:52:34
介紹了PC控制系統的一般步驟。
2009-04-07 10:05:36 15
15 電磁和永磁組成的混合懸浮系統,懸浮能耗小,能夠減少懸浮系統能量的損耗。本文建立了混合懸浮系統的數學模型,并采用了滑模控制器設計了混合懸浮控制系統,利用李亞普
2009-06-25 14:51:0215 提出了基于力控制的磁懸浮硬盤的概念, 介紹了力控制磁懸浮硬盤的基本工作原理和結構設計。對差動控制工作狀態下系統的受力情況進行了分析, 推導出了其主要參數的計算公式。
2009-07-01 10:58:2120 介紹了一種用于磁懸浮軸承實時控制的數據采集與處理系統, 該系統采用數字信號處理器(DSP) 作為主控單元, 可對五路傳感器信號實現高速采集, 所采用的A öD 轉換器集成在DSP 內部
2009-07-03 09:06:3111 分析了磁懸浮系統的機械耦合問題, 給出了磁懸浮系統在三維空間的機械耦合的計算方法, 討論了各參數對機械耦合的影響。在此基礎上探討了磁懸浮系統中傳感器直接測量方式和差
2009-07-14 09:20:5215 分析了磁懸浮系統的機械耦合問題, 給出了磁懸浮系統在三維空間的機械耦合的計算方法, 討論了各參數對機械耦合的影響。在此基礎上探討了磁懸浮系統中傳感器直接測量方式和差
2009-07-14 09:20:528 本文研究設計了一種基于PC 機與單片機的水下作業控制系統。本控制系統采用的是PC 機與單片機串行通訊的方式,來實現對自動工具庫的可視化控制。在對本計算機控制系統進行介
2009-07-30 11:37:5312 針對TI 公司的TMS320LF2407,在詳細描述其串行通信接口和模塊的基礎上,結合減搖水艙試驗臺架控制系統,介紹了實現DSP 與PC 機串行通信的設計方法,并給出了相關的框圖和程序。
2009-07-30 15:52:0015 本文主要討論由 DSP 為核心構建的磁懸浮系統,并詳細分析控制系統的兩個關鍵要素:主控器和懸浮驅動器。在設計中,這兩部分我們分別采用數字處理芯片TMS320LV5402 和兩象限
2009-08-10 09:27:2326 采用DSP 雖然可以實現無刷直流機的高性能實時控制,但僅靠DSP,很難再對系統的關鍵信息進行深入的分析和處理。為此,本文采用PC 機和DSP 的主從結構,在Matlab 環境下,設計了
2009-08-17 10:58:4311 模塊是EMS 型磁懸浮列車的基本功能單元,常用的懸浮控制方法是將其兩端等效為兩個完全獨立的對象分別設計控制器。實際上模塊兩端的運動狀態是互相耦合的,獨立設計的控
2009-08-26 10:29:0420 針對 EMS 型磁懸浮列車懸浮系統的非線性、遲滯性及模型不確定的特點, 本文采用了模糊自適應整定PID 控制技術來滿足其對動態和靜態性能的要求。仿真結果表明模糊自適應整定PID
2009-09-01 16:45:3627 本文研究設計了以ARM9 微處理器中的S3C2410 為硬件核心、嵌入式Linux 為軟件核心的懸浮轉子的自動控制系統。整個系統分為控制模塊和顯示模塊兩個部分,控制模塊給出了懸浮轉子
2009-12-16 11:32:2020 介紹了高速磁懸浮列車的基本原理,利用MATLAB/Simulink 搭建了高速磁懸浮列車用長定子直線同步電機的數學模型,并且構建了高速磁懸浮列車牽引控制的Simulink 仿真系統,最后提供
2009-12-22 16:17:1327 本文介紹了在DSP 上實現基于μC /OS 的遠程溫度控制系統的設計。用戶可以通過網絡中任一PC 機的瀏覽器界面實現對溫度的實時遠程控制。
2010-01-25 14:32:0637 本文介紹了一種的新型的步進電機控制系統,采用DSP作為控制器,構建步進電機的驅動系統,并在此基礎上實現細分角度和電流的實時運算。利用其片內集成的事件管理模塊通過軟
2010-02-21 14:14:0033 交替極無軸承永磁電機的懸浮力脈動分析交替極無軸承永磁電機的懸浮力與轉子轉角本質上是無關的,其控制系統因此得以簡化,但考慮到諧波因素時,其引起的懸浮力脈動對于
2010-02-22 10:23:4413 基于RTW 的DSP 控制系統研究
摘要 提出了一種基于RTW的TMS320F2812 DSP數字控制系統,基于模型的設計流程,實現了工程開發過程從算法設計到最終實現的所有開發階
2010-04-07 10:18:1737 數字信號處理芯片TMS320F240是針對電機、運動控制的專用DSP控制器。利用控制器DSP(TMS320F240)實現感應電機直接轉矩控制系統的全數字化,對控制系統的硬件包括外圍接口進行了設計
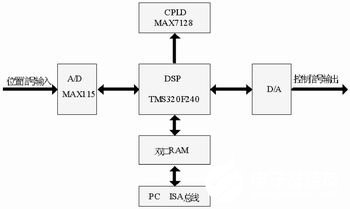
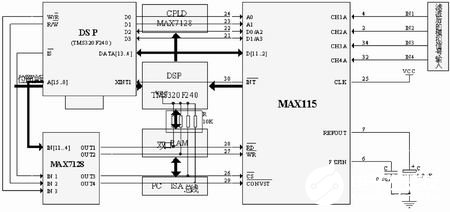
2010-07-20 15:51:1422 摘 要: 本文主要討論了一種快速多通道12位ADC MAX115在磁懸浮軸承控制系統中的應用,詳細介紹了MAX115的功能特點和工作過程,同時給出了MAX115與DSP(TMS320F240)之間的硬件接口
2006-03-24 13:32:29890 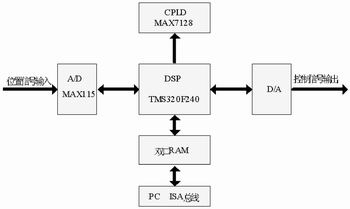
摘????要:本文介紹了應用于磁軸承的雙DSP熱備容錯控制方案,該方案采用時鐘同步技術,由總線表決模塊實現系統的容錯處理,硬件判決模塊實現
2006-04-15 16:35:46448 摘要: 為抑制電磁噪聲對懸浮控制系統的影響,介紹了一種通過避開噪聲持續時間進行A/D采樣的方法,詳細討論了該方法的原理與實現。實踐表明,它能有效地防
2009-06-20 14:50:10524 
現場總線技術在熱工控制系統中的應用
介紹現場總線技術及特點,并通過一個實驗系統說明了其在熱工控制領域的應用。最后說明了現場總線技術的應用現狀和存在的
2009-10-13 19:02:591573 
基于DSP的磁懸浮列車速控系統采用速度控制系統后,駕駛臺給出的不再是控制力的大小,而是速度大小,由速度控制平臺根據算法動態改變列車牽引力。司
2010-07-30 09:51:341421 
在鍍鋅生產線中垂直帶鋼水平晃動會造成鍍層不均$ 基于磁懸浮技術能夠實現無接觸穩定的特點.研制了用于帶鋼防抖的磁懸浮系統分析建立了系統的數學模型設計了PID控制器$ 研究設計
2011-05-17 10:34:050 磁懸浮列車運行控制系統(OCS)是一個安全性要求很高的系統,其安全可靠性直接關系到磁浮列車的安全穩定運行。
2011-07-24 10:56:424167 
工控機的鍵盤布置隨控制對象不同而變化,標準PC挺盤布局難以滿足要求。本文在分析標準鍵盤掃描、通訊原理基礎上,用單片機8751設計出一通用的鍵盤控制器,編制了相應的程序,實現了與標準鍵盤的完全兼容。
2016-03-28 15:32:048 基于DSP的伺服控制系統設計與實現,有興趣的同學可以下載學習
2016-04-26 18:16:4240 常導超導磁懸浮演示試驗裝置的控制資料,有興趣的同學可以下載學習
2016-04-28 15:45:318 磁懸浮開關磁阻電機高速數字控制系統的研究。
2016-05-04 15:05:0919 常導超導磁懸浮演示試驗裝置的控制資料,很好設計資料,快來學習吧。
2016-05-09 17:10:0128 功率放大器OPA544在主動磁懸浮控制系統中的應用,感興趣的小伙伴們可以看看。
2016-08-10 17:02:410 空間電磁懸浮系統中樣品監視系統的研制空間電磁懸浮,監視系統
2016-09-18 15:22:4816 磁懸浮pcb 磁懸浮電路圖
2016-12-16 15:40:4153 實車碰撞車速控制系統控制器的設計與實現
2017-01-24 15:45:238 磁懸浮牽引逆變器設計
2017-03-23 09:33:041 DSP的運動控制系統設計
2017-10-19 14:58:4212 的片內外設集成在一起, DSP成為傳統的微控制單元和多片設計系統的一種理想替代品。 在減搖水艙試驗臺架控制系統工作過程中,需要實時修改DSP中控制器參數等變量,因此如何實現PC機與DSP的可靠通信成為一個重要問題。串行通信具有連接簡單、使用靈活方便、數據傳遞可靠等優點,在
2017-10-27 11:20:300 磁懸浮系統具有非接觸、無摩擦、速度快、壽命長的優點,所以磁懸浮技術在實際中取得了廣泛的應用。磁懸浮系統為非線性開環不穩定系統,對其控制方法的研究非常具有典型意義。磁懸浮球系統作為研究磁懸浮特性,掌握
2017-11-07 15:04:5133 本文主要討論由 DSP 為核心構建的磁懸浮系統,并詳細分析控制系統的兩個關鍵要素:主控器和懸浮驅動器。在設計中,這兩部分我們分別采用數字處理芯片TMS320LV5402 和兩象限橋式懸浮斬波器。最后
2017-11-13 15:51:2922 磁懸浮列車是由無接觸的電磁懸浮、導向和驅動系統組成的新型交通工具,磁懸浮列車分為超導型和常導型兩大類。簡單地說,從內部技術而言,兩者在系統上存在著是利用磁斥力、還是利用磁吸力的區別。從外部表象而言
2017-12-05 17:56:40166174 在磁懸浮軸承的開關功率放大器系統中,采用數字單周期控制算法具有算法簡單、易實現、響應速度快等優點,但傳統的單周期控制算法存在控制延時的缺點,會影響系統的穩定性以及功率放大器帶寬。該文在考慮磁懸浮軸承
2018-04-24 17:57:3327 磁懸浮軸承具有運行時不產生摩擦且無需潤滑,維護費用低等優點,被廣泛用在各種工業應用中,如發電、石油提煉、渦輪機械、泵機和飛輪儲能系統。使用 COMSOL? 軟件可以模擬幾類磁懸浮軸承,簡化設計參數的計算方法,從而優化軸承性能。
2018-07-21 09:16:1411123 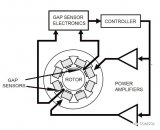
在折騰數字的PID電機控制之前,我想再弄一個模擬電路的磁懸浮東東,來加深對PID的理解。這個磁懸浮,就是讓一塊磁鐵懸浮在一個電磁鐵下面,屬于下拉式的,相對比較簡單,不過也是很鍛煉動手能力的東西。
2018-08-06 16:40:4480083 磁懸浮技術由于其無接觸的特點,避免了物體之間的摩擦和磨損,能延長設備的使用壽命,改善設備的運行條件,因而在交通、冶金、機械、電器、材料等各個方面有著廣闊的應用前景。功率放大器作為磁懸浮控制系統的重要組成部分,其作用是控制電磁鐵中電流產生電磁力。其性能優劣對磁懸浮控制系統有著顯著的影響。
2020-01-25 17:18:001406 
本文目的是通過磁懸浮技術的理論研究,讓跟多的人認識磁懸浮,了解磁懸浮。通過本文的理論知識的介紹,我自己設計制作了一個簡單的磁懸浮裝置,用于實現磁懸浮原理。通過一個簡單的裝置就能實現磁懸浮原理,讓人們
2020-07-03 08:00:0016 一、實驗內容:1、熟悉磁懸浮球控制系統的結構和原理;2、了解磁懸浮物理模型建模與控制器設計;3、掌握根軌跡控制實驗設計與仿真;4、掌握頻率響應控制實驗與仿真;5、掌握PID控制器設計實驗與仿真;6、實驗PID控制器的實物系統調試;
2020-08-14 08:00:0024 企查查APP顯示,3月2日,珠海格力電器股份有限公司公開“磁懸浮床墊、磁懸浮床墊的控制方法和床”專利,公開號為CN112425952A。
2021-03-02 14:17:451781 對以DSP為核心的磁懸浮軸承控制器、控制硬件的構成及其外圍電路的設計,釆用 Fuzzy-PID控制方法,并用C語言編制了相應的數控軟件。通過實驗證明該系統具有良好的控制效果。
2021-04-29 10:33:0733 本文主要對三軸轉臺伺服系統進行設計與研究。該控制系統主要由伺服控制器、交流伺服電機、光電編碼器等組成。其中,伺服控制器以TI公司TM3s20F2407DSP為核心,利用DSP事件管理器( EVA
2021-05-06 14:11:589 本文依托海爾集團研發中心“直驅式磁懸浮洗衣機”項目,針對洗衣機內桶旋轉過程轉子震蕩劇烈問題進行研究。課題中洗衣機內桶可看作立式磁浮軸承轉子,其定位控制原理、電控設計與磁浮軸承系統相同。本文以磁浮軸承電控驅動為研究重點。
2021-05-11 10:24:5111 本文建立了單電磁鐵懸浮系統(SMIS)的非線性動態模型,并在平衡點附近線性化,得到相應的磁懸浮系統線性化模型和對應的系統狀態方程。在系統能控和能觀的基礎上,設計了基于單電磁鐵的電壓反饋控制、PD控制、模糊控制和模糊PD控制,對這幾種控制方法進行了仿真分析,并對各種控制方法的性能特點進行了比較。
2021-05-13 10:21:0432 直線電機助力的磁懸浮鼓風機進入調試運行階段。眾所周知,在2020年,中車大連所成功研發磁懸浮鼓風機,將磁懸浮軸承技術和高速電機技術以及智能控制系統融入傳統風機中,進行一體化設計,形成快速、節能
2021-11-29 10:08:541333 遠翔霍爾fs50b在磁懸浮產品中的應用;磁懸浮的運作原理,擺件自轉原理,霍爾元件在磁懸浮擺件中的應用。遠翔FS50B線性霍爾能完美適配在磁懸浮產品中!
2022-05-31 17:03:431844 
眾所周知,磁懸浮技術現在被運用于眾多領域,其中最著名的就是磁懸浮列車,磁懸浮列車是由無接觸的磁力支撐、磁力導向和驅動系統組成的新型交通工具。為何近十幾二十年來磁懸浮列車的名聲如雷貫耳呢?讓我們來深究
2022-12-22 10:27:44558 
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論