卡爾曼濾波(Kalman Filter)是一種遞歸的、自適應的濾波算法,廣泛應用于估計系統狀態和觀測過程中的噪聲。它最初在1960年被提出,被認為是控制理論和信號處理領域中最重要的發展之一。卡爾曼濾波器在許多領域,包括導航、機器人、金融和通信系統中都有廣泛的應用。
2023-12-07 18:26:15 778
778 
卡爾曼濾波的估計值能很好的逼近真實值,我的疑惑是,這和濾波有什么關系,請高手介紹下卡爾曼算法是如何濾波的?
2013-07-04 22:57:04
已知測量值和原始值,但測量噪聲和觀測噪聲未知,如何進行卡爾曼濾波。之前看了好像可以用自適應卡爾曼,但不是很懂,求例子,最好有注釋的
2017-03-23 19:12:17
卡爾曼濾波算法對比其他的濾波算法有什么優點
2023-10-11 06:42:24
卡爾曼濾波算法是怎么實現對數據的預測處理的
2023-10-10 08:28:02
將高斯過程回歸融入平方根無跡卡爾曼濾波(SRUKF)算法,本文提出了一種不確定系統模型協方差自適應調節濾波算法.該算法分為學習和估計兩部分:學習階段用高斯過程對訓練數據進行學習,得到系統回歸模型
2011-10-24 09:59:04
[開發工具] STM32算法的翅膀之MATLAB基于加速度計與氣壓計的三階卡爾曼濾波計算加速度、速度及高度主要介紹了卡爾曼濾波器的使用原理,給出了matlab代碼,并在STM32F407平臺對卡爾曼濾波器進行了驗證,傳感器為MPU6050與DPS310,測試結果令人滿意,速度與高度無累積...
2021-08-17 07:02:07
本帖最后由 huangdewen 于 2015-4-8 23:19 編輯
收藏的一些關于卡爾曼濾波算法的教程,簡單易懂自己寫的代碼#define dt 0.001//微分時間#define
2013-09-13 17:52:42
卡爾曼濾波風力發電機中的風速估計,轉速估計甚至扭矩估計都設計到卡爾曼濾波,如果只是單一傳感變量的平滑處理也能用到卡爾曼濾波。振動信號中的濾波大多采用低通去除高頻噪音,而卡爾曼濾波則是通過不確定度把
2021-07-12 06:00:47
在陀螺儀和加速度計中使用卡爾曼濾波static float P[2][2] = {{ 1, 0 }, { 0, 1 }};//協方差矩陣P的兩列代表陀螺儀、加速度計兩維,那兩行代表什么呢?為什么P的數組元素是{{ 1, 0 }, { 0, 1 }}而不是其他值?
2013-11-04 21:06:10
的Kg,就是卡爾曼增益(Kalman Gain)。他可以隨不同的時刻而改變他自己的值,是不是很神奇!下面就要言歸正傳,討論真正工程系統上的卡爾曼。3. 卡爾曼濾波器算法(The Kalman
2016-09-21 11:41:07
希望這篇筆記可以幫助到你。卡爾曼濾波(Kalman filtering)是一種利用線性系統狀態方程,通過系統輸入輸出觀測數據,對系統狀態進行最優估計的算法。卡爾曼濾波簡介:你可能經常聽學長學姐提起這個...
2022-02-28 14:24:57
用于實時處理。為了克服這一缺點,60年代Kalman把狀態空間模型引入濾波理論,并導出了一套遞推估計算法,后人稱之為卡爾曼濾波理論。卡爾曼濾波是以最小均方誤差為估計的最佳準則,來尋求一套遞推估計的算法,其
2016-09-21 12:10:54
最近正在學習卡爾曼濾波算法,用LabVIEW仿照C語言寫了個一維的卡爾曼濾波程序,不知寫的對不對,發上來希望大家指正。
2017-10-21 21:15:50
[共享] 卡爾曼濾波算法在TI TMS320C6713 DSP上的實現
2011-08-20 23:23:18
最近想做四軸飛行器,在論壇看到這個帖子MikroKopter:來自德國的開源四軸飛行器項目bbs.elecfans.com/jishu_475743_1_1.html小弟看過之后對其中有些內容不太了解,四軸飛行器不是卡爾曼濾波最好嗎?這個mikrokopter的代碼是不是用的卡爾曼濾波器?
2015-06-11 17:27:38
,傳感器返回值都是不夠準確的。需要用DSP芯片對飛行器各飛行模態的傳感器返回信息進行處理,處理的算法是根據卡爾曼濾波理論開發的。這個項目的核心就是用DSP芯片對卡爾曼濾波算法進行實現,難點是研究出一種效果好的卡爾曼濾波算法。
2015-10-09 15:12:30
` 本帖最后由 liqijian101 于 2017-7-14 11:22 編輯
-->相比中值濾波、平均值濾波,卡爾曼濾波具有更好的濾波效果。 但初學者一般難以編寫卡爾曼濾波算法
2017-07-14 10:58:02
`做四軸飛行器有一段時間了,現在分享一些我對于卡爾曼濾波算法用于兩個傳感器融合的一些心得:卡爾曼濾波 實現性最優解的一種求解算法,但是他必須根據建模的預測值和傳感器數據采集的測量值 才能夠進行
2015-06-12 15:11:05
國外撈回來的一個卡爾曼濾波的栗子,學習了一下程序解釋:程序中的Q是系統噪聲,R是測量噪聲,大概意思就是說該信誰多一點,如果Q=0就最后完全信預測結果,R=0則完全信測量結果[code]/** A
2015-06-12 15:21:49
單片機ADC采樣算法 之 卡爾曼濾波算法的核心思想是,根據當前的儀器"測量值" 和上一刻的 “預測量” 和 “誤差”,計算得到當前的最優量.再預測下一刻的量, 里面比較突出
2022-01-11 07:02:38
時間差距較大,卡爾曼濾波的優勢就不是很明顯,而互補濾波算法的處理時間則短得多,處理后的數據精度與卡爾曼濾波算法的精度相差無幾,采用胡波濾波的方法。對于水平位置測量,則用電子羅盤對GPS的信息進行校正
2016-12-30 18:03:48
模塊在隧道、地下停車場等弱信號環境下均表現出了高水平的導航定位性能。SKM-4DU實跑路測的行車軌跡證明SKM-4DU能充分利用慣性導航系統和衛星導航系統優點,基于最優估計算法—卡爾曼濾波算法融合兩種
2017-10-12 18:13:02
網上搜到一篇關于卡爾曼濾波算法的論文,對低維卡爾曼濾波算法作了幾何解釋,這種解釋對卡爾曼濾波有一種直觀的理解,使人們對卡爾曼濾波有更本質的認識。有需要的童鞋帶走吧
2015-06-11 15:28:33
以ADSP為系統核心實現的兩輪自平衡動作模仿小車,主要由自平衡模塊與控制模塊構成。自平衡模塊采用卡爾曼濾波算法對傳感器測得的角度值和角速度值進行數據融合后求出精確的角度值,再利用PID控制實現倒立
2014-11-03 17:12:35
這是學校的一個課題,概念理解了,但是自己C水平有限,編寫不規范,實驗數據有問題,因為網上例子接近無
2017-08-02 19:49:27
的影響,決定用卡爾曼濾波的算法,2、如果 位移通過加速度二次積分得到,那樣誤差是逐漸累積增大的,如何解決?對于速度變化小的情況如何解決,比如某個路段接近勻速,那么這一段又要做如何的處理目前只想到這么多的問題,不知道大家有沒有好的建議
2013-08-11 22:00:01
。2.數字濾波算法的選擇根據運動傳感器噪聲模型,一般以下濾波算法可供融合算法選擇: a)互補濾波算法 b)擴展卡爾曼濾波算法 c)無跡卡爾曼濾波算法 d)粒子濾波算法 e)Mahony互補濾波算法
2019-07-19 06:47:49
怎么減少濾波的計算量
2023-10-12 07:14:28
本項目主要以自平衡小車為原型,通過PDF控制策略來實現系統的平衡,核心原理為倒立擺,通過該系統來驗證和分析PDF控制算法性能的優缺點。同時,該系統需要采用角加速度計和陀螺的數據融合,通過卡爾曼濾波
2013-10-28 18:40:19
【作者】:***;宋申民;陳興林;【來源】:《控制理論與應用》2010年02期【摘要】:將高斯過程回歸融入平方根無跡卡爾曼濾波(SRUKF)算法,本文提出了一種不確定系統模型協方差自適應調節濾波算法
2010-04-24 09:04:39
為研究機載火控系統多傳感器數據融合的方法。采用了用于多目標多傳感器航跡數據融合的改進的卡爾曼濾波算法,運用假設檢驗理論,充分考慮了位置數據互聯的正確性和目標信號的
2009-06-27 08:30:08 12
12 在實際系統中,常用的數據融合方法是基于擴展的卡爾曼濾波算法的融合算法,但是這種融合算法的跟蹤精度并不是很高. 通過對濾波跟蹤型數據融合的研究,提出了基于轉換測量值卡爾
2009-07-14 11:28:0015 擴展卡爾曼濾波估計載波參數的算法研究:提出了一種在接收信號幅度未知的情況下進行載波參數估計的擴展卡爾曼濾波算法,該算法把信號幅度及偽碼自相關的乘積作為一個獨立變
2009-10-20 18:04:1834 本文介紹了一個自由轉子陀螺的漂移誤差模型識別系統。該系統在實現數據采集的基礎上采用擴展卡爾曼濾波算法進行模型參數的識別,在擴展卡爾曼濾波計算中采用了改進的格
2009-12-19 14:59:088 根據目前動力蓄電池模型研究的現狀,分析了各種電池模型的優缺點,提出了一種非線性的等效電路電池模型,并通過卡爾曼濾波算法,在線辨識電池內阻,得到內阻自適應電池模型,通過
2010-06-15 08:08:0520 首先介紹了卡爾曼濾波的算法,并給出了一套遞推計算公式,然后將此算法應用于短期負荷預測,并針對負荷預測的本身的特點對算法進行了改進,用兩種算法進行了實際的負荷預
2009-07-11 18:44:361122 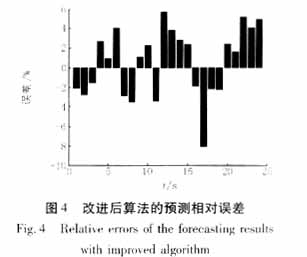
卡爾曼濾波 算法具有收斂平穩、速度快、精度高的優點,在信號處理中受到廣泛應用。但由于卡爾曼濾波算法不僅是一種迭代算法,而且還包含矩陣的連乘運算和求逆運算,這使得該算
2011-06-14 16:36:400 本文將從嵌入式DSP電機控制芯片的基本特征開始,介紹一下基于DSP的磁場定向控制和擴展卡爾曼濾波算法
2011-09-24 00:43:47853 
將多傳感囂信息融合技術應用于水環境監測系統,提出了采用分散化濾波方案的系統融合結構模型,并討論了向量卡爾曼濾波算法和單隱層3層前向神經網絡。實踐表明,融合效果良好。
2011-11-04 15:11:3449 以ADSP為系統核心實現的兩輪自平衡動作模仿小車,主要由自平衡模塊與控制模塊構成。自平衡模塊采用卡爾曼濾波算法對傳感器測得的角度值和角速度值進行數據融合后求出精確的角度
2011-12-02 14:27:14540 為驗證衛星導航系統/SINS組合導航系統具有更高的精度,采用深度組合的方法,利用技術比較成熟的GPS與我國正在研發的COMPASS組網形成的衛星導航系統,通過對3種卡爾曼濾波算法仿真實
2012-03-20 10:20:1229 將擴展卡爾曼濾波算法由6維推廣至9維,根據觀測到的坐標位置、方位角和俯仰角,應用擴展卡爾曼濾波算法進行濾波,并通過計算機仿真得以驗證,從而獲得較好的定位效果。
2012-03-22 17:17:4415 建立了雙觀測站被動跟蹤系統的非線性濾波模型,通過擴展卡爾曼濾波方法在該非線性模型下的具體實現步驟。分析了目標通過不同角度向觀測站襲來時,卡爾曼濾波算法對目標參數估計的
2012-04-18 15:32:3450 2013-03-23 12:34:37126 針對測量船伺服系統存在隨機誤差的情況,為提高角誤差的精度,基于著名的Singer模型建立了航天測量船伺服系統卡爾曼濾波算法,并通過計算機進行了實際測量數據的仿真實驗。從實
2013-06-25 16:31:4132 文中以第七屆飛思卡爾杯大學生智能車競賽為背景,以飛思卡爾MC9S12XS128單片機為核心,設計了一種自平衡巡線智能車系統。本設計基于倒立擺的動力學模型,經過卡爾曼濾波算法對陀螺
2013-07-26 11:43:0794 2013-12-16 16:27:2114 2014-03-05 22:32:2361 2014-12-02 16:08:170 2015-06-11 15:25:5910 2015-08-05 17:55:382 卡爾曼固定值濾波算法C語言及說明,值得初學者下載試用。
2015-11-09 16:53:107 本文針對提高低精度微陀螺精度的問題展開研究,基于陀螺陣列的虛擬陀螺技術,利用濾波補償算法,將多個具有相似特性的低精度陀螺組成陀螺陣列,提出改進的卡爾曼濾波算法將多個陀螺的輸出進行數據融合,構成虛擬
2015-12-28 09:56:144 卡爾曼濾波算法在TI TMS320C6713 DSP上的實現
2016-06-03 15:37:0341 電子、電子信息專業電路單片機學習教程資料——新手平衡小車的卡爾曼濾波算法總結
2022-05-11 17:20:570 卡爾曼濾波算法C語言實現 可以運行STM32 和 arduino上 已測試成功
2016-09-27 16:34:1667 卡爾曼濾波算法介紹,公式實現,后面附有公式的實現代碼。封裝函數。
2016-12-17 17:22:2240 卡爾曼濾波算法
2016-12-17 17:22:2251 雙卡爾曼濾波算法在鋰電池SOC估算中的應用
2017-01-13 13:50:2116 大家加油
2017-02-28 20:52:2220 本文在簡單介紹了卡爾曼濾波基本原理基礎上,基于分段線性系統理論以及SOM方法對系統狀態可觀性和可觀度的分析,采用降階卡爾曼濾波算法,合理剔除不可觀或觀測度較低的狀態因子,對高階系統進行降階設計。采用
2017-11-05 15:34:3212 ,提出了機器人狀態估計的擴展卡爾曼濾波算法,并證明了該算法的均方誤差是指數有界的。進而,考慮了網絡具有隨機時延的情況,對上述擴展卡爾曼濾波算法做出了相應的修正。最終,仿真與實驗結果表明該算法是有效可行的。
2017-11-11 17:13:274 針對常用的非線性擴展卡爾曼濾波算法在工程應用中所存在的發散問題,文中分析歸納了導致該算法發散的主要原因,同時在目前兩種抑制濾波發散非線性算法的基礎上,探討了一種既保證濾波精度又提高自適應能力的改進型
2017-11-11 17:51:145 為了實現在線估計汽車動力電池的荷電狀態( sOc),提出了結合神經網絡的無跡卡爾曼濾波算法。以Thevenin電路為等效電路模型,建立了狀態空間表達式,采用最小二乘算法對模型參數進行辨識。在此基礎上
2017-12-08 16:47:192 介紹了mpu6050姿態融合原理及程序代碼分析,MPU6050是一款姿態傳感器。主要介紹三種姿態融合算法:四元數法、一階互補算法和卡爾曼濾波算法。
2017-12-11 13:31:4071163 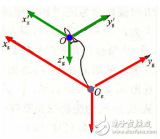
針對自動扶梯或自動人行道自動扶梯安全性參數檢測的快速、準確需要,采用增量式光電編碼器為傳感檢測單元,以STM32處理器為最小系統,基于卡爾曼濾波算法,本文設計了一種智能型自動扶梯安全性參數測試儀
2017-12-12 18:25:461 本文主要對基于STM32和MPU-6050的兩輪自平衡小車系統設計與實現進行了分析,采用高性能STM32F103C8T6作為主控制器,采用卡爾曼濾波算法和雙閉環PID控制算法對小車進行自平衡控制。提高了數據采集和控制的實時性,提高了系統的穩定性和抗干擾能力。
2017-12-23 16:36:4029638 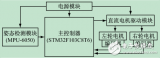
隨著數據流的廣泛運用,數據流中異常數據的檢測問題也引起了更多的關注。現有的卡爾曼濾波算法需要的歷史數據量雖然小,但只適用于單個異常點的檢測,對于復雜連續的異常值檢測效果較差。針對這個問題,提出一種
2017-12-29 10:10:082 針對一個無融合中心傳感器網絡中的狀態估計問題,提出一種基于量化信息的分布式卡爾曼濾波(QDKF)算法。首先,在分布式卡爾曼濾波(DKF)中,以節點狀態估計精度為加權準則,動態選取加權矩陣,使得全局
2018-01-07 11:18:130 為了進一步提高非線性卡爾曼濾波算法的估計精度,提出一種高階球面單形一徑向容積求積分卡爾曼濾波( HDSSRCQKF, high-degree spherical simplex-radial
2018-01-15 16:58:401 針對傳統魯棒非線性濾波在觀測噪聲為非高斯強干擾噪聲情況下,濾波性能下降的問題,提出一種利用卡方檢測法預判斷的非線性魯棒檢測濾波算法。該算法通過卡方檢測設置門限,剔除突變野值,利用M估計修正量測更新
2018-01-25 14:33:350 針對電動汽車動力鋰離子電池的狀態估計問題,提出一種基于分數階等效電路建模方法,并采用分數階卡爾曼濾波算法估計電池荷電狀態( SOC)。首先建立基于二階等效電路的分數階電池模型,采用遺傳算法辨識
2018-03-09 09:51:411 就是這樣,卡爾曼濾波器就不斷的把covariance遞歸,從而估算出最優的溫度值。他運行的很快,而且它只保留了上一時刻的covariance。上面的Kg,就是卡爾曼增益(Kalman Gain)。他可以隨不同的時刻而改變他自己的值,是不是很神奇!
2018-03-31 10:46:0115131 本文檔的主要內容詳細介紹的是MSP430控制MPU-6050測量角度和角加速度并通過卡爾曼濾程序免費下載,基于卡爾曼濾波算法寫的程序,比DMP解算省掉不少MCU資源,有需要的可以下載。
2018-11-05 08:00:0028 針對小型四旋翼飛行器姿態解算這一基本問題,詳細分析了姿態解算的過程,提出了其中的難點問題。應用低成本捷聯慣性測量單元,設計了一種基于互補濾波器算法的姿態求解器。經過實驗驗證表明: 與目前常用的卡爾
2019-04-08 08:00:001 本文檔的主要內容詳細介紹的是使用51單片機實現MPU6050的卡爾曼濾波算法代碼免費下載 。
2019-08-20 17:31:0059 針對小型四旋翼飛行器姿態解算這一基本問題,詳細分析了姿態解算的過程,提出了其中的難點問題。應用低成本捷聯慣性測量單元,設計了一種基于互補濾波器算法的姿態求解器。經過實驗驗證表明: 與目前常用的卡爾
2019-07-22 08:00:003 卡爾曼于 1960 年提出了離散系統線性濾波的遞推求解方法即卡爾曼濾波算法。 該濾波算法是基于線性最小平方法的、進行有效遞推計算的一組數學方程式, 算法功能強大, 支持對過去、現在和將來狀態的估算
2019-07-25 08:00:004 無人機飛控三大算法:捷聯式慣性導航系統、卡爾曼濾波算法、飛行控制PID算法。
2020-09-24 11:08:512138 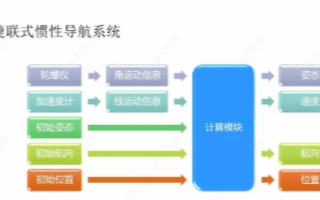
卡爾曼濾波實質上就是基于觀測值以及估計值二者的數據對真實值進行估計的過程。預測步驟如圖1所示: 圖1 卡爾曼濾波原理流程圖 假設我們能夠得到被測物體的位置和速度的測量值 ,在已知上一時刻的最優估計值
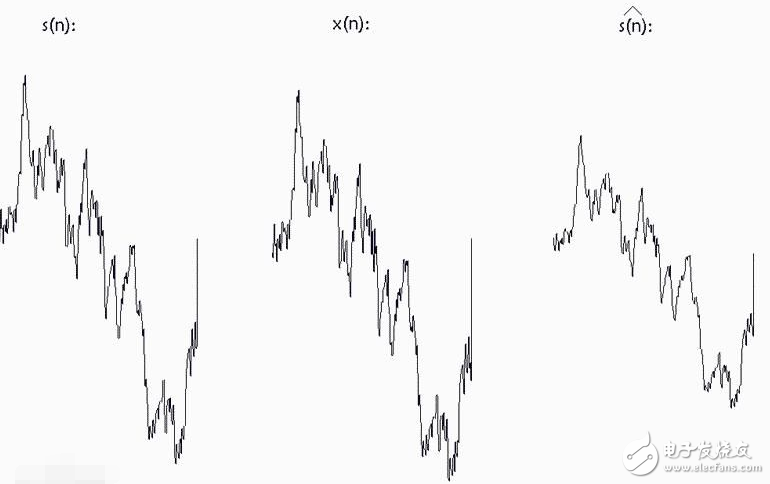
2021-01-07 10:08:029444 在視頻圖像獲取過程中“由于噪聲對圖像序列的降質”需要設計實時噪聲濾波器。討論了視頻圖像的卡爾曼濾波問題及自適應卡爾曼濾波算法“并討論了自適應卡爾曼濾波算法的簡化”以利于硬件實現自適應卡爾曼濾波器“并進行了簡化算法仿真”完成基于FPGA實現的實時自適應卡爾曼濾波器的設計。
2021-01-22 14:29:2922 在視頻圖像獲取過程中“由于噪聲對圖像序列的降質”需要設計實時噪聲濾波器。討論了視頻圖像的卡爾曼濾波問題及自適應卡爾曼濾波算法“并討論了自適應卡爾曼濾波算法的簡化”以利于硬件實現自適應卡爾曼濾波器“并進行了簡化算法仿真”完成基于FPGA實現的實時自適應卡爾曼濾波器的設計。
2021-01-22 14:29:2913 非線性動態系統存在非線性和噪聲不確定的問題,容積卡爾曼濾波對解算該類系統有較好的精度,為了提升導航系統對異常觀測值的穩定性,對采樣欻據進行均值濾波處理,降低干擾較大的采樣欻據對于濾波結果
2021-05-06 16:20:008 卡爾曼濾波算法:卡爾曼濾波算法包括預測、更新和估計三個步驟。其中,預測步驟通過狀態的動態方程來預測系統的下一個狀態;更新步驟通過觀測方程來更新系統的狀態估計;估計步驟通過估計誤差來評估狀態估計的準確性。因此,需要深入了解卡爾曼濾波算法的基本思想和步驟。
2023-04-26 10:43:57955 風河智能FH-9004通過采用北斗差分RTK差分定位原理,利用北斗高精度定位技術對導線舞動進行在線監測,可直觀得到舞動的觀測值,利用改善的卡爾曼濾波算法對數據進行處理,使監測精度更高;更及時發現并預警線路安全隱患。
2022-12-29 13:03:18512 
本文采用自適應卡爾曼濾波算法,基于Thevenin/RC電池模型,鋰離子電池SOC進行估算,并和常規KF算法進行比較分析,以此提高SOC估算的精度。
2023-06-28 11:45:571707 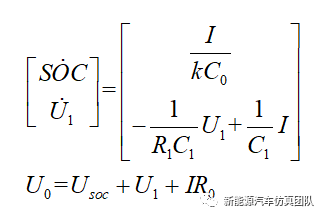
講解卡爾曼濾波之前,先講一個故事。兩個釀酒師傅判斷當前酒的度,一個老師傅,一個學徒。酒廠里酒的度數,老師傅的判斷大多時候是更加準確,而學徒大多時候的判斷誤差會大一些。
2023-07-13 16:37:01720 
MPU6050使用互補濾波與卡爾曼濾波算法進行姿態解算
2023-08-07 15:46:562 卡爾曼濾波(Kalman Filter)是一種用于估計狀態的算法,最初由R.E. Kalman在1960年提出。它是一種線性高斯濾波器,常用于處理包含誤差噪聲的動態系統。卡爾曼濾波算法通過組合測量
2024-01-17 10:51:51401
 電子發燒友App
電子發燒友App










 工商網監
工商網監
評論