1. 摘要 神經輻射場(NeRF)是一種新穎的隱式方法,可以實現高分辨率的三維重建和表示。在首次提出....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 11-14 16:48
?1077次閱讀

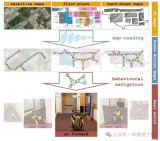
機器人能否像人類一樣利用有限的度量和空間信息進行導航呢?目前,大多數機器人的導航系統依賴于詳細的幾何....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 11-13 10:51
?897次閱讀
同時定位與地圖構建(SLAM)是一項關鍵技術,允許移動機器人在部分或完全未知的環境中自主導航。它包括....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 11-12 11:26
?1242次閱讀

0. 這篇文章干了啥? 機器人學中的一個基本問題是創建機器人觀察到的場景的有用地圖表示,其中有用性由....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 11-12 10:54
?684次閱讀

同步定位與地圖構建 (SLAM) 是計算機視覺中的一個基本問題,旨在在同時跟蹤相機姿勢的同時對環境進....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 11-11 16:17
?883次閱讀

在眾多無人機類型中,四旋翼因其具備垂直起降、穩定性強、結構相對簡單等特點而得到廣泛應用。目前,無論是....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 11-08 09:41
?1398次閱讀

這篇文章提出了一種新穎的目標跟蹤方法SFTrack,針對無人機(UAV)視頻中的獨特挑戰,采用了三種....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 11-01 10:23
?885次閱讀

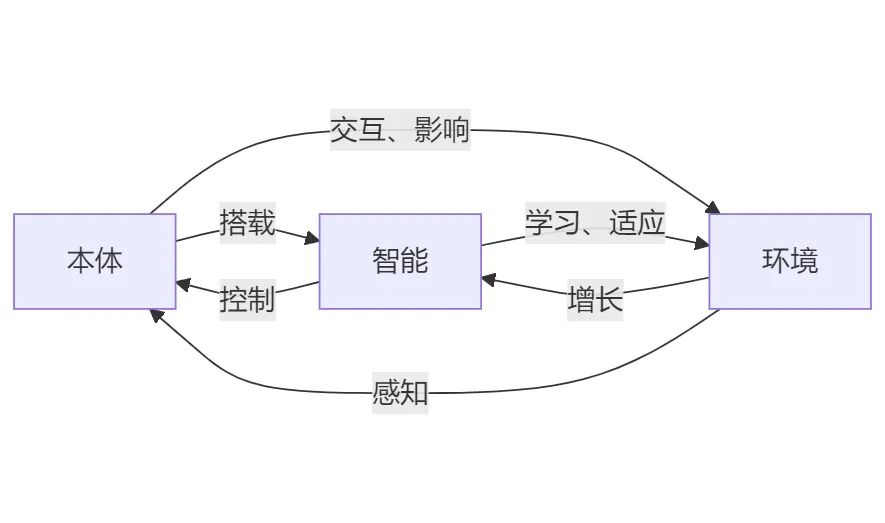
還是各類具身智能產品,如李飛飛的 Voxposer、谷歌的 RT1 和 RT2、谷歌的 RTX、字節....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 11-01 10:19
?3472次閱讀
精確和魯棒的初始化對于視覺慣性里程計(VIO)至關重要,因為不良的初始化會嚴重降低姿態精度。
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 11-01 10:16
?973次閱讀

近年來,點云表示已成為計算機視覺領域的研究熱點之一,并廣泛應用于自動駕駛、虛擬現實、機器人等許多領域....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 10-29 09:43
?1595次閱讀

運動恢復結構(SfM)是計算機視覺領域一個長期存在的問題,旨在根據每個相機拍攝的圖像來估計場景的3D....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 10-28 14:13
?1936次閱讀

掌握這 17 種方法,用最省力的方式,加速你的 Pytorch 深度學習訓練。
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 10-28 14:05
?667次閱讀

3D多目標跟蹤(3D MOT)在各種機器人應用中發揮著關鍵作用,例如自動駕駛車輛。為了在駕駛時避免碰....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 10-28 10:07
?671次閱讀

視覺定位旨在估計在已知環境中捕獲的給定圖像的旋轉和位置,大致可以分為絕對姿態回歸(APR),場景坐標....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 10-28 10:03
?579次閱讀

視覺匹配是關鍵計算機視覺任務中的關鍵步驟,包括攝像機定位、圖像配準和運動結構。目前最有效的匹配關鍵點....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 10-28 09:57
?896次閱讀

擴散模型的迅速崛起是過去幾年機器學習領域最大的發展之一。在這本簡單易懂的指南中,學習你需要知道的關于....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 10-28 09:30
?1394次閱讀

BundleFusion是一種稠密的實時室內場景三維重建算法框架。輸入為RGB-D相機采集的并且是對....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 04-16 09:37
?1564次閱讀

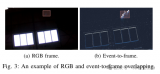
這篇文章的基本原理是利用事件驅動的視覺傳感器(DVS)和傳統的RGB攝像頭相結合,實現在邊緣設備上實....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 04-13 12:15
?1279次閱讀
為了使用三維運動先驗正則化估計的三維軌跡,模型另外預測了每條軌跡的剛性嵌入,這使能夠軟地分組表現出相....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 04-13 12:12
?1603次閱讀

基于NeRF的SLAM算法采用全局地圖和圖像重建損失函數,通過可微分渲染捕獲稠密的光度信息,具有高保....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 04-01 12:44
?1279次閱讀
這篇論文介紹了一種名為RT-DETR的實時檢測Transformer,是第一個實時端到端目標檢測器。
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 03-06 09:24
?2656次閱讀

基于Transformer架構的大型模型在人工智能領域中發揮著日益重要的作用,特別是在自然語言處理(....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 02-22 16:27
?1061次閱讀

背景部分介紹了3D點云應用領域中公開可訪問的數據集的重要性,這些數據集對于分析和比較各種模型至關重要....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 02-22 16:16
?1920次閱讀

控制模塊可以分為控制邏輯和控制算法兩大部分,邏輯用于處理各種輸入輸出的選擇、切換等,算法是輸入輸出具....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 02-20 10:43
?979次閱讀

精確、快速地劃定清晰的邊界和魯棒的語義對于許多下游機器人任務至關重要,例如機器人抓取和操作、實時語義....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 02-20 10:30
?1333次閱讀

基于NeRF的SLAM算法采用全局地圖和圖像重建損失函數,通過可微分渲染捕獲稠密的光度信息,具有高保....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 01-26 10:48
?988次閱讀

Uni3D在少樣本點云部件分割任務上也展示出了卓越的性能。下表結果顯示,在各種實驗條件下,Uni3D....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 01-25 10:10
?776次閱讀

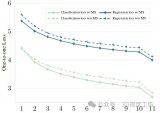
混合監督會產生比基線更低的一對一損失。x軸對應epoch,y軸對應一對一監督的訓練損失。虛線和實線分....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 01-23 14:14
?954次閱讀
S3DIS Area 5的大規模全景分割結果,共有9.2 M個點( 78M預采樣)和1863個真實"....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 01-22 14:03
?997次閱讀

發自動駕駛論文哪少的了數據集,今天筆者將為大家推薦一篇最新的綜述,總結了200多個自動駕駛領域的數據....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 01-19 10:48
?1323次閱讀




 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1

