相比于單目視覺,雙目視覺(Stereo Vision)的關鍵區別在于可以利用雙攝像頭從不同角度對同一目標成像,從而獲取視差信息,推算目標距離。
2016-11-05 03:46:28 3097
3097 據麥姆斯咨詢報道,物聯網及雙目視覺專家鉅芯發布了一款智能雙目立體視覺系統,以及業內首顆智能雙目立體視覺芯片eagleye100。
2017-10-26 10:26:219961 有多種 3D 傳感器方案來實現深度感知系統,包括立體視覺相機、激光雷達和TOF(飛行時間)相機。每個選擇都有其優缺點,其中,嵌入式深度感知立體系統成本低,堅固耐用,適合戶外使用,并且能夠提供高分辨率的彩色點云。
2022-08-23 16:45:151042 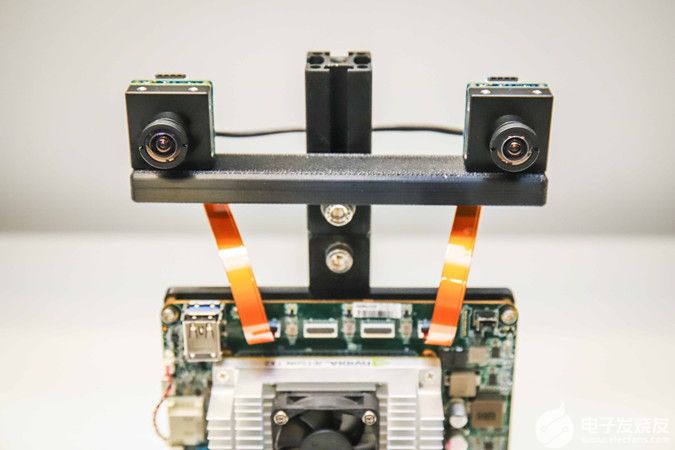
雙目立體視覺中常用的基于區域的局部匹配準則主要有圖像序列中對應像素差的絕對值之和SAD(sum of absolute differences)、對應像素差的平方之和SSD(sum of squared differences)及半全局匹配算法SGM(semi—global matching)。
2023-07-01 09:34:021117 
由大聯大世平推出的基于NXP S32V234雙目立體視覺解決方案,可顯著提高物體識別率以及識別種類,從而進一步完善ADAS領域的相關應用。
2021-05-18 14:13:291043 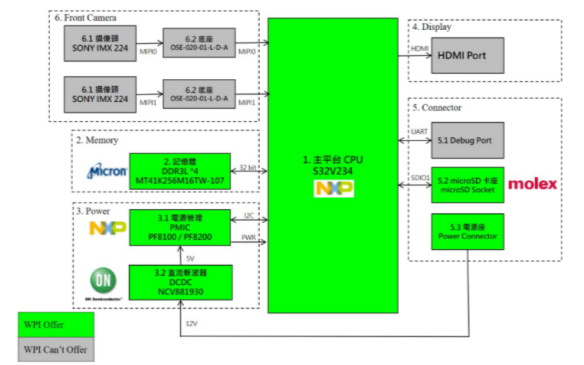
其使用的算法復雜。被動測距按照使用的視覺傳感器數量可分為單目視覺、雙目立體視覺和多目視覺三大類。 (1)單目視覺 單目視覺是指僅利用一臺照相機拍攝一張相片來進行測量。因僅需要一臺相機,所以該方法
2020-12-01 15:08:04
`雙目立體視覺原理大揭秘(一)——雙目視覺導航、定位;雙目立體視覺是一門有著廣闊應用前景的學科,根據雙目立體視覺CCAS提供的思路及組成原理,隨著光學、電子學以及計算機技術的發展,將不斷進步,逐漸
2013-11-21 16:20:51
將成為工業檢測、生物醫學、虛擬現實等領域的關鍵技術,還有可能應用于航天遙測、軍事偵察等領域。目前在國外,雙目體視技術已廣泛應用于生產、生 活中。雙目立體視覺是計算機視覺的一個重要分支,單從雙目視覺
2013-11-21 16:22:03
雙目立體視覺(BinocularStereoVision)是機器視覺的一種重要形式,因其可簡單地利用左右攝像機中的圖像信息計算得到相機視野中物體相對于攝像機的深度信息使得該技術擁有廣泛的應用前景
2021-12-23 07:19:52
四種:1、雙目視覺導航、定位;2、三維重構;3、雙目立體測量;4、空間三維立體跟蹤。這些運用需求,其實很多項目上都有用到,如工業流水線上物體外形檢測、表面缺陷等,如娛樂活動中可以利用立體視覺構造
2016-03-03 09:36:59
最近在做一個雙目立體視覺項目,LABVIEW有模塊嗎,有哪位大神用LABVIEW做過
2018-01-13 19:44:32
://mp.weixin.qq.com/s/kcecV6PNE92FB8ugSoV4tw雙目立體視覺系統使用兩只相機同步采集圖像,通過像素匹配獲得深度圖像,進而獲取三維點云,系統結構如下。用下圖來解釋雙目視覺的基本原理:圖中所示變量為
2020-03-02 17:03:12
大佬們好我有一定的Labview基礎,然而對Labview的雙目視覺測量所知甚少,現在有一個需求,就是在比較小的空間內實現微米級的三維動態測量,想知道通過Labview雙目視覺有實現的可能性嗎?希望大佬們多多指導。感激不盡!謝謝!
2020-07-21 21:50:21
基于matlab編程3D立體視差源碼程序
2020-12-23 07:57:04
申請理由:之前用wrtnode的u***接雙攝像頭外加一個么mcu實現過一個一個雙目視覺隨動平臺,這樣太麻煩了,希望能用這個來實現一個更簡單的解決方案。項目描述:u***接雙攝像頭,mcu控制云臺。通過WIFI將雙目視覺傳遞到手機進行顯示,同時將手機的角度信息返回,控制云臺轉動。
2015-09-10 11:25:10
,快速、精確的獲得被測對象的全場位移應變信息,在各個研究領域得到了廣泛應用。 立體視覺是由多幅圖像獲取物體三維幾何信息的方法。雙目立體視覺利用兩臺不同位置的攝像機同時拍攝,或由一臺相機變換位置后分時拍攝以
2015-09-21 10:11:12
雙目視覺智能平臺概述硬件資源1 FMC 雙目MIPI模塊FL0214FL0214模塊的參數說明 FL0214模塊的結構圖FL0214模塊原理框圖模塊FMC LPC的引腳分配
2021-01-01 06:18:17
`相比于單目視覺,雙目視覺(Stereo Vision)的關鍵區別在于可以利用雙攝像頭從不同角度對同一目標成像,從而獲取視差信息,推算目標距離。恩智浦視覺ADAS專用SoC: S32V234未來十年
2017-08-12 15:15:52
利用LABVIEW視覺模塊完成攝像機標定,一般需要哪些vi?相關參數怎么設置?
2015-05-17 17:24:58
。 那么,維視圖像的雙目立體視覺產品在以上應用中到底有哪些優勢呢,這個我們還要從典型的雙目應用流程說起。一套典型的雙目視覺系統處理流程如下圖所示: 其中,維視圖像提供的雙目立體視覺系統已經完成了雙目標定所
2016-01-19 16:59:12
、基于單目特征的室內定位導航等。同時,單目視覺是其他類型視覺系統的基礎,如雙目立體視覺、多目視覺等都是在單目視覺系統的基礎上,通過附加其他手段和措施而實現的。雙目立體視覺雙目立體視覺。雙目視覺
2018-12-13 21:23:57
基于DM642的機器人雙目視覺系統設計
2021-04-02 07:20:41
專注于雙目立體視覺技術分享與傳播
2021-11-22 09:26:58

根據雙目視覺傳感器的工作原理, 分析了影響測量精度的因素, 表明雙目視覺傳感器的物體空間坐標與圖像坐標之間存在復雜的非線性映射關系, 其數學模型無法用解析式精確地加以
2009-07-10 15:53:11 11
11 本文提出了一種雙目立體視覺的幾何解法,通過分別獲取場景中某物體在左右攝像機中投影點的實際像素坐標,利用標定得到的攝像機內參數,求得投影點的理想圖像坐標。然后
2009-12-30 17:01:1914 基于預測的立體視覺_力反饋研究:提出了一種多傳感器混合的機器人伺服控制方案, 該方案在任務初始階段利用視覺傳感器對對象進行跟蹤, 在任務的末段利用力傳感器對對象運動進
2010-01-02 14:20:5820 對于基于圖像的具有手眼或固定攝像機模式的雙目視覺伺服控制系統,考慮機器人的運動學特性,在攝像機的內外參數部分未知的情況下,給出了一種直接自適應控制器實現定位
2010-01-11 15:57:3118 本文主要從控制角度出發,針對手眼機器人雙目視覺伺服控制問題,利用變結構控制理論設計了視覺伺服控制器,同時用自適應估計的方法對深度進行估計,基于圖像誤差實現了定
2010-01-13 14:43:2719 雙日視覺是計算機視覺領域的一個重要組成部分。雙目視覺研究中的關鍵技術攝像機標定和立體匹配一直是研究的熱點。本文由兩部分組成,分別對雙目視覺的算法和未標定圖
2010-08-14 16:41:540 一種基于圖像分割和立體視覺相結合的障礙物檢測方法。通過分割提取出了障礙物的大致形體并濾去地面上的冗余信息,這樣就把立體視覺避障中匹配區域縮小到有用的障礙物區
2010-10-18 16:08:0827 視覺傳感器的標定技術
雙目視覺傳感器由兩臺性能相同的面陣CCD攝像機組成,基于立體視差的原理,可完
2009-11-07 11:42:011723
0 引言 雙目立體視覺測量是基于視差原理,由多幅圖像獲取物體三維幾何信息的方法。在計算機視覺系統中,雙目立體視覺測量一般由雙攝像機從不
2010-09-26 17:07:031051 
雙目立體視覺的研究一直是機器視覺中的熱點和難點。使用雙目立體視覺系統可以確定任意物體的三維輪廓,并且可以得到輪廓上任意點的三維坐標。因此雙目立體視覺系統可以應用在
2011-04-08 17:51:29130 本內容基于ADSP-BF548處理器設計實現了具有結構光雙目視覺的四足可變形仿生機器人系統
2011-08-31 17:42:15144 根據雙目立體視覺傳感器三角立體視差模型,建立了結構參數誤差的傳遞函數,分析了雙目視覺傳感器結構參數及其誤差傳遞規律對傳感器綜合測量精度的影響,得出了結構參數的合理
2011-09-06 14:38:4075 介紹了雙目立體視覺在光電子器件自動對接系統中的應用。該系統以線性成像模型為基礎建立了雙目立體視覺系統的數學模型,介紹了視覺系統標定的實現,包括標定點提取、特征點定
2011-10-11 15:15:4263 本文以遺視投影變換為依據,針對多視覺傳感器檢測系統中的雙目視覺傳感器,建立了雙目視覺傳感器測量空間三維坐標的模型.事先確定攝像機的部分不易變化的參數,其它參數在攝
2012-03-02 16:02:1315 本文將試著去闡述立體視覺技術。閱讀完本文后你將對數據如何在系統中流動和其間所有可調整的參數有一個更深入的了解。這將使你可以量身定做自己的系統來完成特殊的任務。
2012-04-28 15:08:1139 雙目視覺是利用機器視覺進行障礙物檢測的研究熱點。針對雙目視頻不同步,導致立體匹配不精準的問題,提出了一種基于圖像處理的雙目校準算法。算法首先根據道路的先驗特征模型,建立視覺校準的敏感區域,以減小
2015-12-18 16:26:5734 電子開發機器人相關教程資料——全自主機器人雙目視覺運動檢測
2016-09-06 16:42:430 微型實時多目立體視覺機設計與實現,感興趣的小伙伴們可以看一看。
2016-09-14 17:17:072 三目立體視覺外極線校正及其FPGA實現方法
2016-09-17 07:30:2416 全自主機器人垂直異構雙目視覺研究,感興趣的小伙伴們可以瞧一瞧。
2016-09-18 17:15:050 1、應用背景 隨著自動化程度越來越高,機器視覺扮演著越來越重要的角色,傳統的2D定位無法解決產品的空間坐標信息,而3D雙目立體視覺可提供較高精度的定位。在汽車行業,汽車后底板的抓取搬運主要交給工業
2017-10-09 15:29:5715 感知與建模、機器人導航、雙目物體跟蹤與檢測以及圖像分割等領域。 三維立體視覺就是研究由2D圖像恢復場景目標即3D信息的一門學科。目前用于三維恢復的方法主要有:結構光法、立體視覺法、光流法、亮度立體法、陰影法和紋
2017-10-20 11:51:305 目前在機器人自主導航方面,立體視覺的應用前景廣闊。,相比于造價昂貴的激光雷達,立體視覺的硬件成本僅為其五分之一左右; 而相比于超聲波測距,立體視覺又有著較遠的測距距離。得益于高精度的立體匹配算法
2017-10-30 17:04:447 攝像機標定是機器視覺和攝像測量領域相對基礎的工作,同時也是最復雜、困難的T作。攝像機標定的意義是得到立體空間中對象的幾何信息,其中所使用的圖像信息由雙目攝像機所得。定后的雙目攝像機得到的圖像目標信息
2017-11-06 14:41:0530 視覺是通過三維世界所感知的二維圖像來研究和提取出三維景物世界的物理結構。所謂的立體視覺,是基于人眼視差的原理,由不同位置的兩臺或多臺攝像機對同一物體進行拍攝,然后通過對同一物體不同圖像中的視差,計算出物體在
2017-11-08 16:20:3418 立體視覺是計算機視覺領域的一個重要課題,它的目的在于重構場景的三維幾何信息。立體視覺的研究具有重要的應用價值,其應用包括移動機器人的自主導航系統,航空及遙感測量,工業自動化系統等。立體視覺是計算機
2017-11-17 10:09:025173 為了滿足深空探測器實時測量天體表面形貌的需求,設計并實現了一套基于立體視覺的在線實時測量原型系統。該系統通過立體相機實時獲取空間天體的立體影像,利用每次觀測的一組立體影像來重建其局部表面形狀
2017-12-19 16:25:110 針對虛擬現實領域現有的顯示模塊無法提供滿足人眼視覺規律的立體視覺效果這一問題,提出一種基于斜交視錐體立體攝像機模型的虛擬現實(VR)立體視覺解決方案。首先,通過研究人眼視域模型和人眼雙目提取深度信息
2018-01-03 16:03:441 針對國內外橋梁裂縫測量效率低、成本高、精度低等現狀,提出了一種基于雙目立體視覺技術的橋梁裂縫測量系統。采用相機標定、圖像匹配、三維坐標計算等雙目立體視覺技術對橋梁裂縫的寬度和長度進行計算,實現了橋梁
2018-01-16 14:59:590 雙目視覺導航敏感器BVS逐漸成為各國航天最新領域的研制熱點。雙目立體視覺是由不同位置的兩臺或者一臺攝像機經過移動或旋轉拍攝同一幅場景,通過各種算法匹配出相應像點,從而計算出視差,然后基于三角測量
2018-01-25 14:00:160 本作品為基于ATLYS FPGA開發平臺、VmodCAM雙目攝像頭模塊開發設計的雙目立體視覺系統。VmodCAM用于采集雙路的視覺信息,FPGA開發平臺負責完成視覺信息的處理及圖像的高速分析。采集
2018-05-28 09:51:002852 隨著自動化程度越來越高,機器視覺扮演著越來越重要的角色,傳統的2D定位無法解決產品的空間坐標信息,而3D雙目立體視覺可提供較高精度的定位。
2018-02-02 10:54:4915431 雙目立體視覺是機器視覺的一種重要形式,它是基于視差原理并由多幅圖像獲取物體三維幾何信息的方法。雙目立體視覺系統一般由雙攝像機從不同角度同時獲得被測物的兩幅數字圖像,或由單攝像機在不同時刻從不同角度
2018-02-08 14:46:2449071 雙目立體視覺是基于視差,由三角法原理進行三維信息的獲取,即由兩個攝像機的圖像平面和北側物體之間構成一個三角形。一直兩個攝像機之間的位置關系,便可以獲得兩攝像機公共視場內物體的三維尺寸及空間物體特征點的三維坐標。所以,雙目視覺系統一般由兩個攝像機構成。
2018-04-11 14:32:5523098 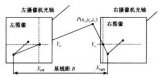
紅外或激光測距是目前應用最為廣泛的無人機探測技術,但是由于它是通過信號來計算的,因此很容易受到外界因素的干擾,用于自動避障的功能并不是很合適。而雙目視覺技術則不會受到太大的外界干擾,因此雖然該技術的難度較高,但是已經開始逐漸被應用到無人機避障技術中來。
2018-05-29 09:01:004684 依托自主研發的嵌入式主動/被動雙目立體視覺技術,人加已經推出雙目AI攝像頭產品——“司眸”系列,可以為各類機器人提供立體視覺感知解決方案,讓機器人擁有人體感知、自主避障等視覺智能,為下游客戶提供成熟、可量產的解決方案。
2018-06-07 14:44:085570 在硬件方面,IBM Research瞄準了一種利用棘波神經網絡的立體視覺系統;該公司表示,目前產業界是使用兩個傳統(訊框)攝影機來產生立體視覺,但從未有人嘗試過神經形態技術。雖然以傳統攝影機提供立體
2018-06-26 09:51:544663 
雙目立體視覺測量是基于視差原理,由多幅圖像獲取物體三維幾何信息的方法。在計算機視覺系統中,雙目立體視覺測量一般由雙攝像機從不同的角度同時獲取周圍景物的兩幅圖像,或有單攝像機在不同時刻從不同角度獲取周圍景物的兩幅數字圖像,并基于視差原理即可恢復出物體的三維幾何模型,重建周圍景物的三維形狀與位置。
2018-12-29 08:50:004102 智能雙目立體視覺芯片模擬人的“雙眼”,給車輛加上一雙“眼睛”,將二維成像變為三維成像。
2018-10-08 15:31:127052 這種自動駕駛演示運行了當今自動系統中常用的三種主要復雜算法,即卷積神經網絡(CNN),密集光流和立體視覺,所有這些都在一個Zynq Ultrascale + MPSoC器件中。
2018-11-28 07:00:001967 針對動車( CRH)車身尺寸范圍大、檢測項目復雜、車型變化多,不容易實現在線測量的難題,首先提出了大型動車車身關鍵尺寸的測量方案,利用雙目電荷耦合裝置( CCD)立體視覺建立各個關鍵尺寸的視覺測量
2019-01-03 11:10:064 視覺技術升級進步。丨深耕不輟,實現業內首款200幀雙目慣性相機面對日益提升的使用需求,為提升產品適用性,INDEMIND深耕不輟,為旗下雙目視覺慣性模組提供了200幀高速環境獲取能力,滿足了不同場景
2019-04-28 18:33:111894 目前的深度相機根據其工作原理可以分為三種:TOF相機、雙相機立體視覺、結構光投射立體視覺。
2019-05-14 09:04:587615 艾邁斯半導體新推出主動立體視覺系統可以增加3D傳感在智能手機、智能家居、智能樓宇和物聯網中的采用。
2019-10-16 17:00:47955 雙目立體視覺測量是人類利用雙眼獲取環境三維信息的主要途徑。隨著計算機視覺理論的發展,雙目立體視覺測量在工業測量中發揮了越來越重要的作用,具有廣泛的適用性。 本論文的主要研究內容是基于雙目立體視覺
2019-11-26 12:05:396 高效便捷安全, 且不會對被測物體造成損壞。 該文研發了一種運用視差原理設計的測量小型工件的雙目立體視覺系統,文中對系統在設計中所經歷的關鍵步驟進行了闡述,并重點對立體匹配展開了詳細的研究,尋找到一種利用機器學習
2020-03-19 08:00:000 利用幾何成像原理建立起CCD雙目立體視覺測量系統的數學模型,從提高系統測量精度出發,在理論上重點對系統結構參數、圖像識別誤差與系統測量精度的關系進行了深入的分析和探討,并通過實驗對結論進行了驗證。研究內容對實際建立該測量系統具有很強的指導作用。
2020-03-30 13:52:065 由于雙目視覺監控系統可以模仿人眼功能,感知三維世界信息,能夠得到被測對象到CCD攝像機的深度信息,近幾年已開始在需要三維立體檢測的領域得到應用。另外,雙目視覺監控系統也可用于多場景監控,大大擴展
2020-05-07 09:55:59966 1.1. 雙目視覺簡介 雙目視覺廣泛應用在機器人導航,精密工業測量、物體識別、虛擬現實、場景重建,勘測領域。 什么是雙目視覺? 雙目視覺是模擬人類視覺原理,使用計算機被動感知距離的方法。從兩個或者
2020-10-23 09:51:5710867 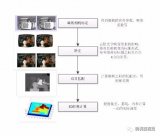
Ambarella日前推出了一款名為CV2的新型相機SoC,專用于提供深度神經網絡(DNN)和立體視覺處理,瞄準ADAS和自動駕駛汽車市場。
2020-12-26 01:16:14361 提出一種三目立體視覺外極線校正的快速算法.3個攝像機呈直角三角形配置,且已知攝像機透視投影矩陣。根據校正基本約束確定校正后的圖像平面,利用圖像不變形約束計算校正所需的三階矩陣,用于在平面仿射坐標
2021-04-01 10:27:2912 本文給出一種實時計算場景稠密深度圖的多目立體視覺機設計與實現方法。立體視覺機使用多個微型攝像機同步獲取場景圖像,采用圖像修正、LoG濾波、多立體圖像對匹配和稠密深度圖等并行算法,利用FPGA的大規模
2021-04-02 09:33:0021 雙目立體視覺技術具有成本低、適用性廣的優點,在物體識別、目標檢測等方面應用廣泛,成為計算機視覺領域的研究熱點。立體匹配是雙目立體視覺技術中的核心算法,對實現物體三維重建具有重要作用。在分析局部、全局
2021-04-12 09:47:543 前言 雙目立體視覺,由兩個攝像頭組成,像人的眼睛能看到三維的物體,獲取物體長度、寬度信息,和深度的信息;單目視覺獲取二維的物體信息,即長度、寬度。 1)雙目攝像頭 常見的雙目攝像頭有以下幾款: 能看
2021-04-26 14:19:438965 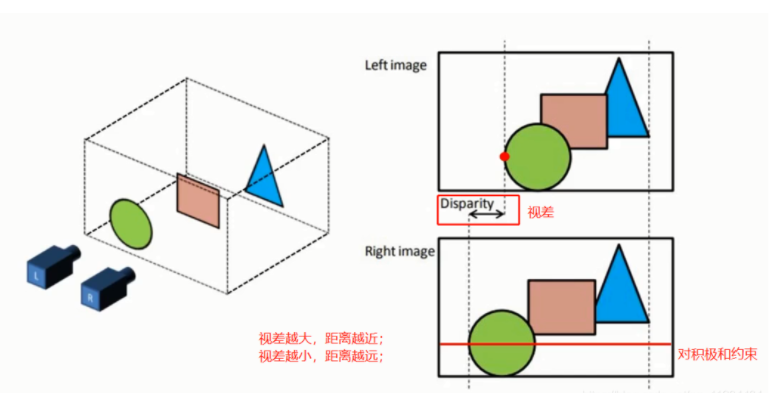
雙目視覺技術的原理、結構、特點、發展現狀和發展方向分析 雙目立體視覺是機器視覺的一種重要形式,它是基于視差原理并由多幅圖像獲取物體三維幾何信息的方法。 雙目立體視覺系統一般由雙攝像機從不同角度同時
2021-06-01 16:36:562223 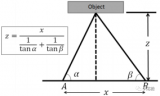
面向雙目立體視覺的迭代式局部顏色校正方法
2021-06-21 14:42:045 / 導讀 / 雙目立體視覺(Binocular Stereo Vision)是機器視覺的一種重要形式,它是基于視差原理并利用成像設備從不同的位置獲取被測物體的兩幅圖像,通過計算圖像對應點間的位置偏差
2021-07-01 09:15:222449 
深度信息恢復是計算機視覺領域的一個重要研究內容。使用傳統的光學成像系統對不同距離的物體成像時,需要機械移動會造成圖像放大率變化,導致深度測量產生誤差。近年來,電控調焦的液晶透鏡光學成像系統已實現對焦、變焦、深度測量等功能,利用液晶透鏡光學成像系統進行雙目立體視覺深度測量可以擴張雙目深度測量范圍。
2022-06-14 13:43:182266 華為nova10 Pro擁有全新雙目立體視覺影像系統 業界首發前置人像特寫鏡頭 ? ? ? ? ? 審核編輯:彭靜
2022-07-05 14:57:291054 
摘要:針對基于雙目深度圖的室外大規模地圖構建計算冗長,而在無人系統的有限算力下,計算效率需求顯著的情況,文中提出一種基于雙目視覺立體匹配的三維地圖構建方法。首先針對由立體匹配算法及原圖引入的噪聲誤差
2022-08-10 11:38:122020 總結一下,我們現在認識了三種制造立體視覺的方法,分別是視覺陷阱、全息投影和產生視差。 雙目立體視覺這一有著廣闊應用前景的學科,隨著光學,電子學以及計算機技術的發展,將不斷進步,逐漸實用化,不僅將成
2022-10-31 15:20:412055 簡單來說,基于雙目立體視覺的測距類似人類的雙眼,和基于TOF、結構光原理的測距不同,它不對外主動投射光源,完全依靠拍攝的兩張圖片( RGB 或者灰度圖)來計算距離。
2022-11-18 14:21:284207 雙目視覺傳感器有效彌補了數據驅動的 AI 算法在泛化性能上的短板,深度學習模型與視差點云技術的結合,極大擴張了視覺傳感器的工作邊界。
2023-06-07 14:16:32218 
電子發燒友網站提供《邊緣AI套件上的立體視覺深度感知.zip》資料免費下載
2023-06-12 14:36:400 在本文中,我們首先介紹了立體視覺系統的主要部分,并提供了有關使用硬件組成和開源軟件制作定制立體相機的說明。由于此設置專注于嵌入式系統,因此它將實時計算任何場景的深度圖,而無需電腦主機。
2023-07-13 16:49:17402 
采用立體視覺,不需要紅外傳感器、聲波定位儀、激光雷達等測距傳感器,可大大降低了技術解決方案的成本。
2023-07-19 12:41:18428 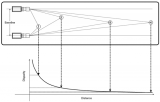
、圖像預處理和特征提取、立體匹配以及三維重建。為解決智能移動機器人、工業裝配機器人、家用機器人、公共服務機器人的視覺問題,雙目立體視覺技術的進一步研究可對多目視覺具有重要的啟發。 本文對雙目立體視覺測深
2023-07-19 14:18:240 雙目立體視覺一直是機器視覺研究領域的發展熱點和難點,“熱”是因為雙目立體視覺有著及其廣闊的應用前景,且隨著光學、計算機科學等學科的不斷發展
2023-08-25 17:28:331278 
的距離傳感解決方案,盡管性能存在顯著差異,特別是在惡劣的天氣和道路條件下。 Nodar是AV先進立體視覺技術的提供商,最近進行了一系列面對面的性能測試,以比較 LiDAR 和立體視覺攝像頭如何處理低光,黑暗和惡劣天氣條件,以及檢測道路上的
2023-10-13 15:33:25230 電子發燒友網站提供《三維立體視覺之三維恢復方法.doc》資料免費下載
2023-11-03 09:31:160 電子發燒友網站提供《立體視覺系統的設計方案.pdf》資料免費下載
2023-11-06 10:17:340 立體視覺傳感器使用遠光燈從 130 米外檢測到一塊躺在道路上的木材,使用近光燈從 100 米外檢測到一塊木材。
LiDAR 從最大 50 米外檢測到木材。
2023-11-08 14:53:11156 雙眼視物時,主觀上可產生被視物體的厚度以及空間的深度或距離等感覺,稱為立體視覺(stereopsis)。其主要原因是同一被視物體在兩眼視網膜上的像并不完全相同,左眼從左方看到物體的左側面較多,而右眼則從右方看到物體的右側面較多。
2023-12-28 17:08:49251 
與人眼的立體感知類似,雙目立體視覺用兩個相機從不同的角度對被測物體成像。依據兩幅圖像中對應點的立體視差( stereo disparity) ,根據三角測量原理實現三維信息測量。
2024-01-03 11:30:31224 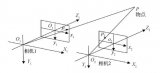
 電子發燒友App
電子發燒友App


 雙目立體視覺是左右眼固定基線(兩個攝像頭間距),通過三角測量的方式,推算出目標距離。
雙目立體視覺是左右眼固定基線(兩個攝像頭間距),通過三角測量的方式,推算出目標距離。 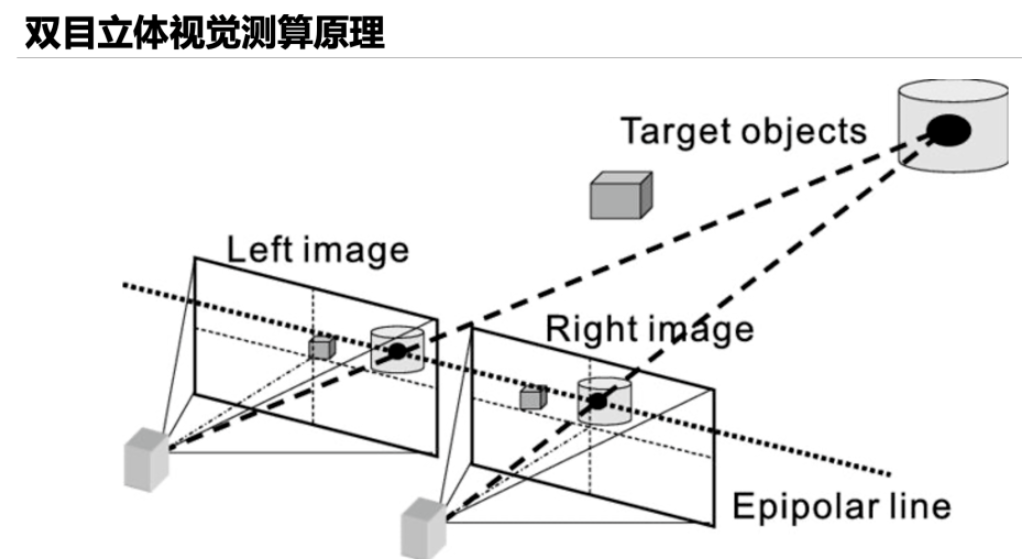







 工商網監
工商網監
評論