創建新的ROS工作空間 由于ROS Motion Planning運動規劃庫與Navigation導....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-26 17:09
?1712次閱讀

簡單輸入對話框 simpledialog(簡單對話框)包含如下常用函數: 實操代碼 """簡單對話框....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-26 17:05
?1087次閱讀

文件對話框 文件對話框幫助我們實現可視化的操作目錄、操作文件. 將文件、目錄的信息傳入到程序中 文件....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-26 16:58
?1055次閱讀

Scale 移動滑塊 Scale(移動滑塊)用于在指定的數值區間,通過滑塊的移動來選擇值 實操代碼 ....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-26 16:48
?1475次閱讀
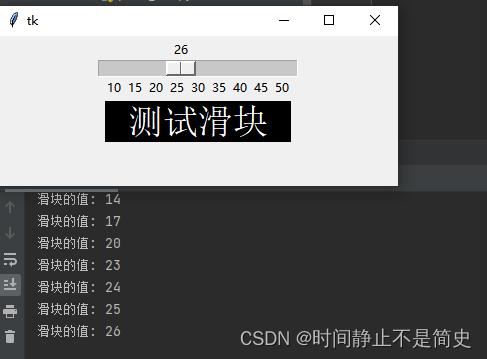
大家好, 我是了不起, 歡迎收看我的冒險之旅。 今天我們將深入學習GUI圖形界面編程tkinter,....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-26 16:42
?1200次閱讀

當然虛擬地址空間劃分不只是如此。因為目前應用程序沒有那么大的內存需求,所以ARM64處理器不支持完全....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-26 16:35
?1149次閱讀
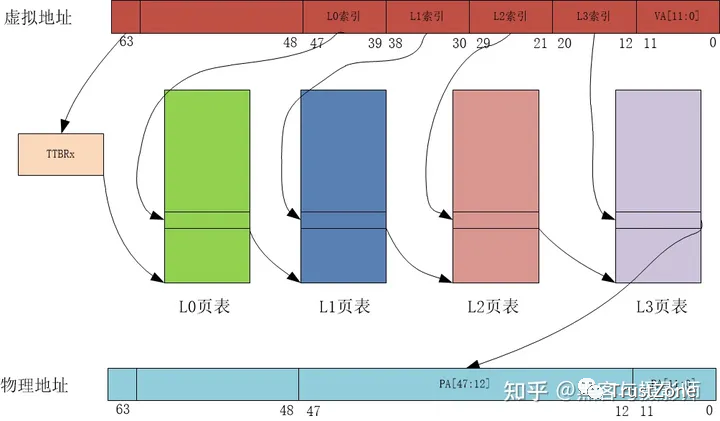
物理頁面大小一級地址總線寬度不同,頁表的級數也不同。以AArch64運行狀態,4KB大小物理頁面,4....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-26 16:28
?1363次閱讀
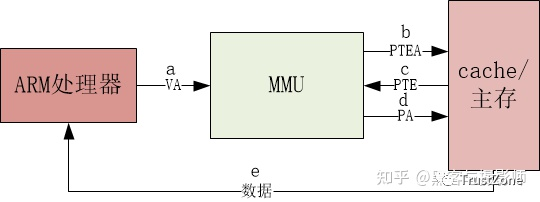
頁命中、缺頁 (1)頁命中 ? a) 處理器要對虛擬地址VA進行訪問。 ? b) MMU的TLB沒有....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-26 16:19
?1510次閱讀
1-MMU相關的基本概念 (1)虛擬地址相關基本概念 ? 虛擬內存(Virtual Memory,V....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-26 16:11
?891次閱讀
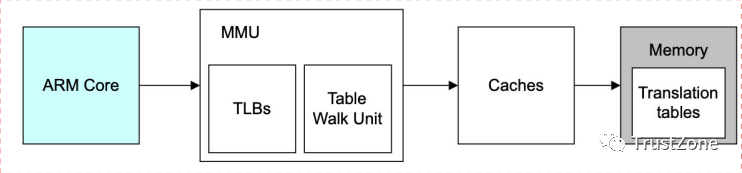
TWU table walk unit:包含從內存中讀取translation tables的邏輯 ....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-26 16:04
?850次閱讀
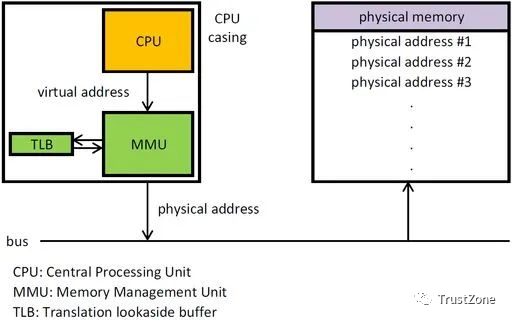
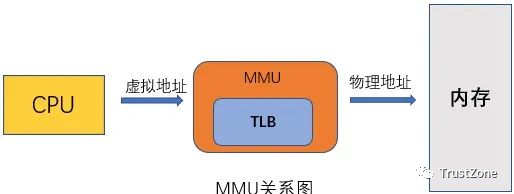
TLB 是 translation lookaside buffer 的簡稱。首先,我們知道 MMU....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-26 15:54
?1116次閱讀
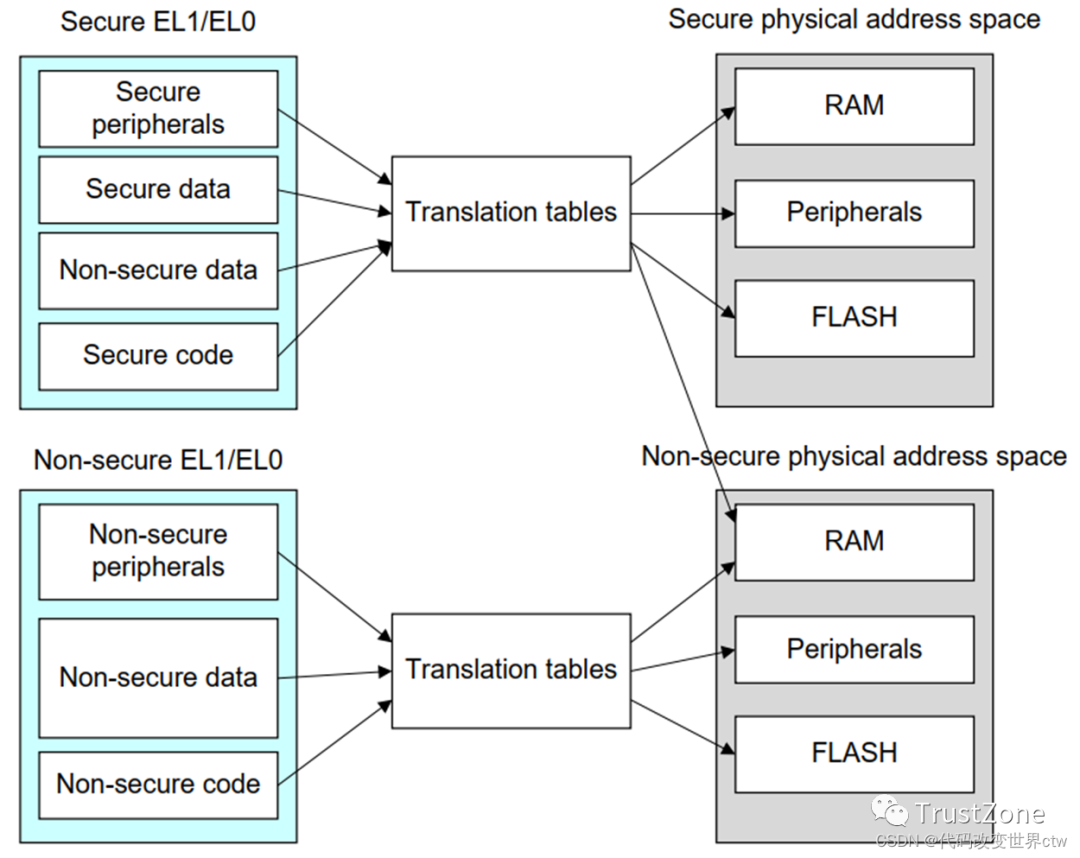
訪問權限控制 TrustZone技術之所以能提高系統的安全性,是因為對外部資源和內存資源的硬件隔離。....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-26 15:47
?874次閱讀
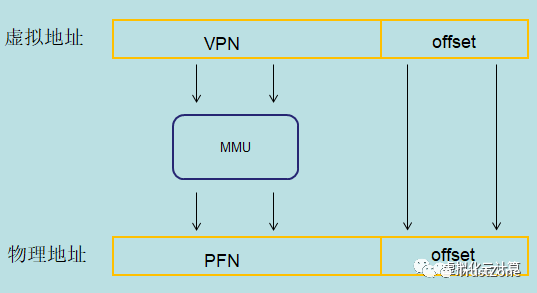
1-CPU發出的虛擬地址 CPU發出的虛擬地址由兩部分組成:VPN和offset,VPN(virtu....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-26 15:40
?986次閱讀
微觀理解 內存管理單元(MMU)的一個重要功能是使系統能夠運行多個任務,作為獨立的程序運行在他們自己....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-26 15:36
?920次閱讀
最近一直在學習內存管理,也知道MMU是管理內存的映射的邏輯IP,還知道里面有個TLB。 今天剛剛好看....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-26 15:21
?844次閱讀
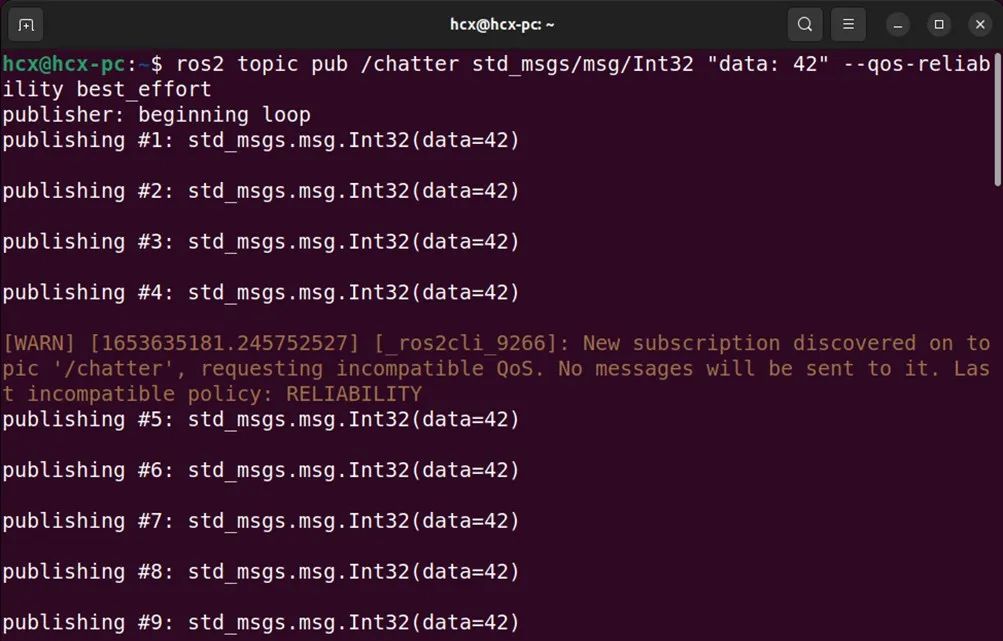
DDS編程示例 我們嘗試在代碼中配置DDS,以之前Hello World話題通信為例。 運行效果 啟....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-24 18:08
?1381次閱讀

DDS這么好,那該如何配置和使用呢?我們先帶大家入個門。 案例一:在命令行中配置DDS 我們先來試一....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-24 18:03
?1329次閱讀
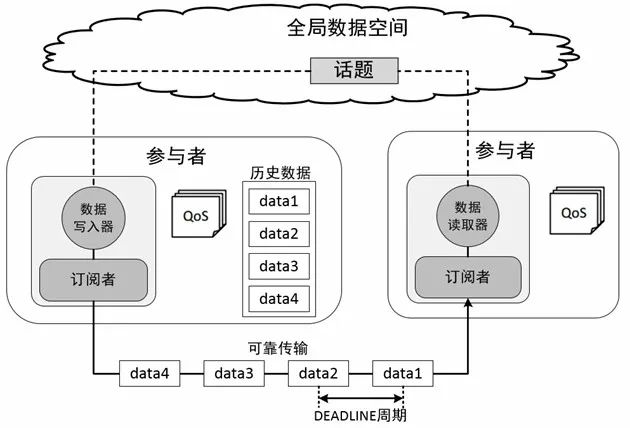
質量服務策略QoS DDS為ROS的通信系統提供了哪些特性呢?我們通過這個通信模型圖來看下。 DDS....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-24 17:59
?1065次閱讀
DDS在ROS2中的應用 DDS在ROS2系統中的位置至關重要,所有上層建設都建立在DDS之上。在這....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-24 17:54
?1426次閱讀

Hello,大家好,歡迎來到《ROS2入門21講》,我是主講人古月。 終于講到ROS2中最為重大的變....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-24 17:50
?2048次閱讀
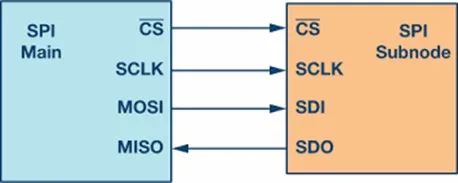
運行示例程序 大家來運行例程,看看會發生什么? $ sudo python3 test_spi.py....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-24 17:43
?747次閱讀

UART串口通信中的數據只能一位一位的傳輸,如果數據量比較大的時候,傳輸速率會受到很大影響,此時我們....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-24 17:37
?1630次閱讀
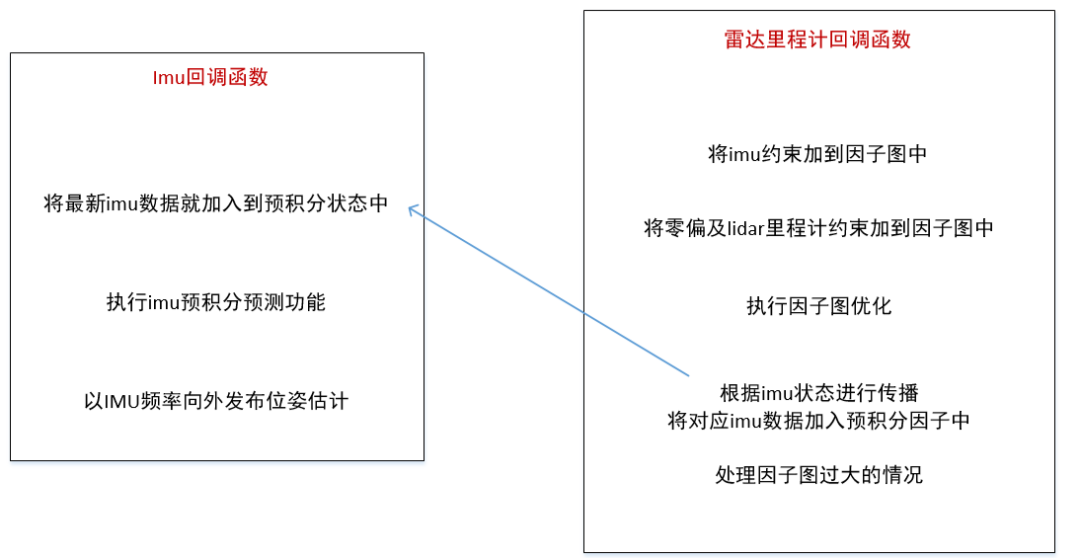
在imu預積分的節點中,在main函數里面 還有一個類的實例對象,那就是TransformFusio....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-24 17:28
?1166次閱讀
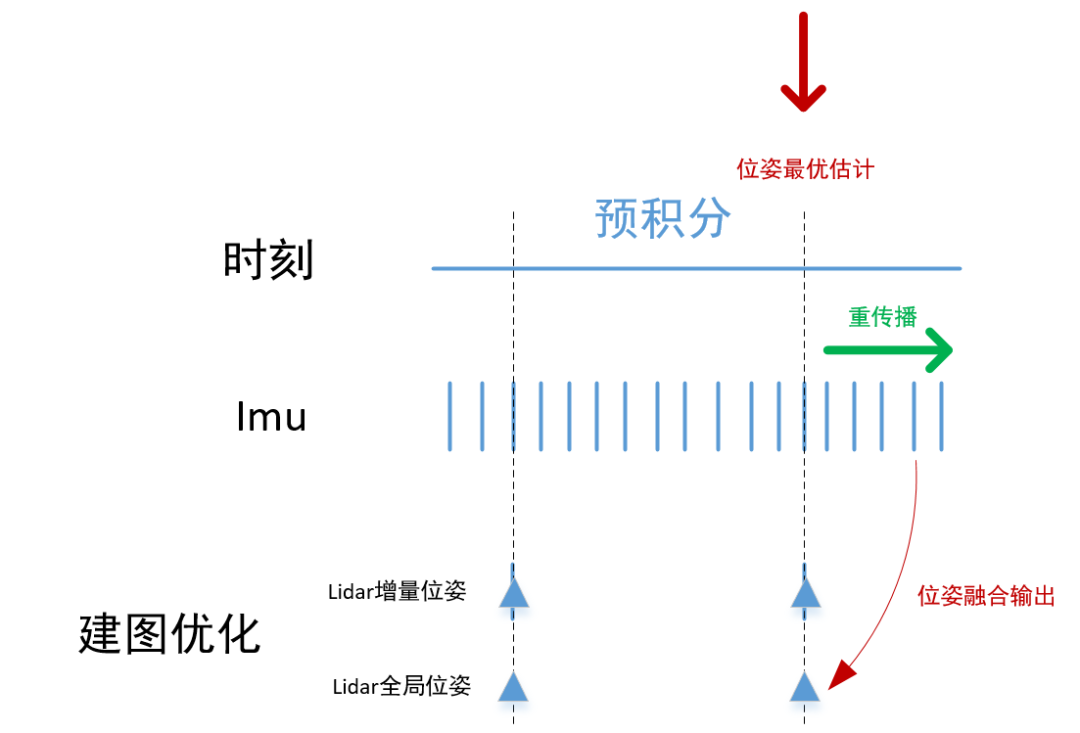
LIO-SAM的全稱是:Tightly-coupled Lidar Inertial Odometr....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-24 17:08
?1760次閱讀
繪制最優路徑 從目標點開始,依次根據節點及父節點回推規劃的路徑直至起點,要注意tree結構體中par....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-24 16:34
?1191次閱讀
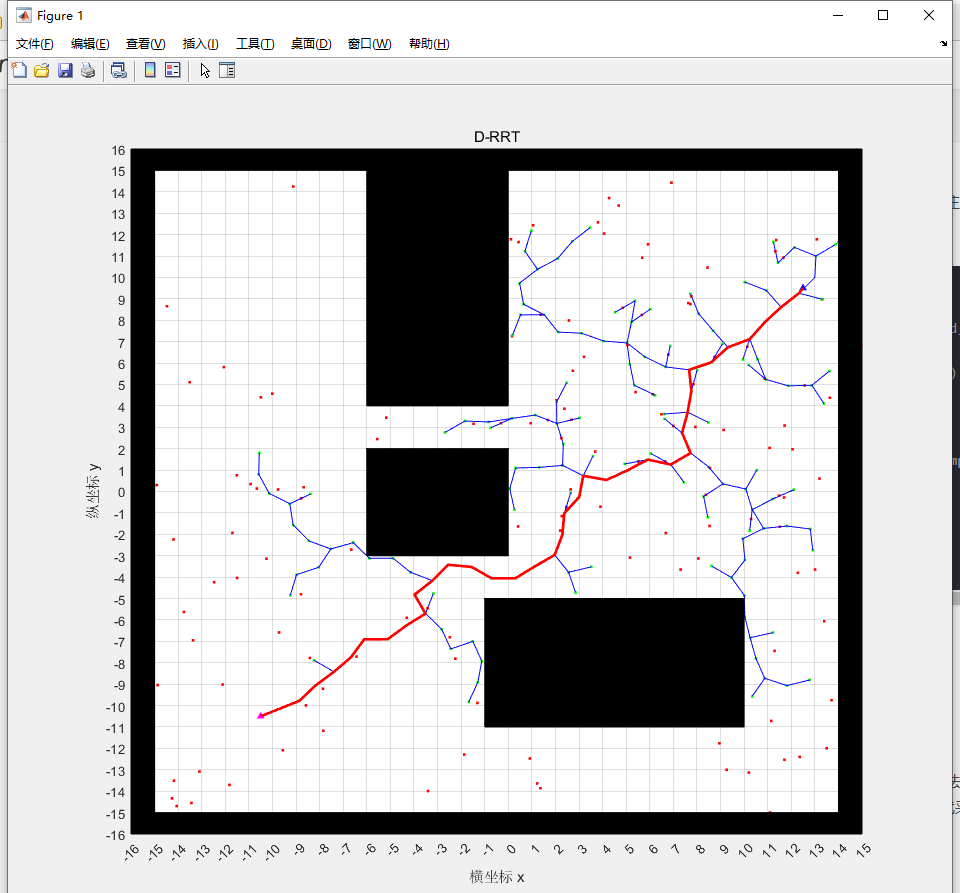
初始化隨機樹 初始化隨機樹,定義樹結構體tree以保存新節點及其父節點,便于后續從目標點回推規劃的路....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-24 16:25
?712次閱讀
使用matlab2019來編寫RRT算法,下面將貼出部分代碼進行解釋。 1、生成障礙物 在matla....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-24 16:04
?848次閱讀
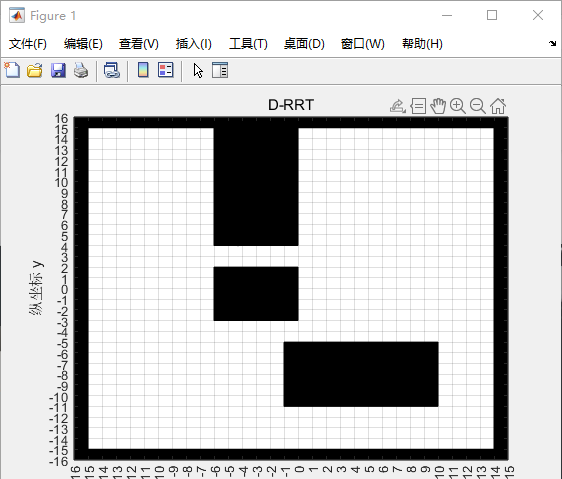
無人駕駛路徑規劃 眾所周知,無人駕駛大致可以分為三個方面的工作:感知,決策及控制。 路徑規劃是感知和....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-24 15:57
?1523次閱讀
激光雷達驅動 移動機器人中常用的激光雷達大多也是USB借口的,比如這款rplidar。 安裝與配置 ....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-24 15:51
?2292次閱讀

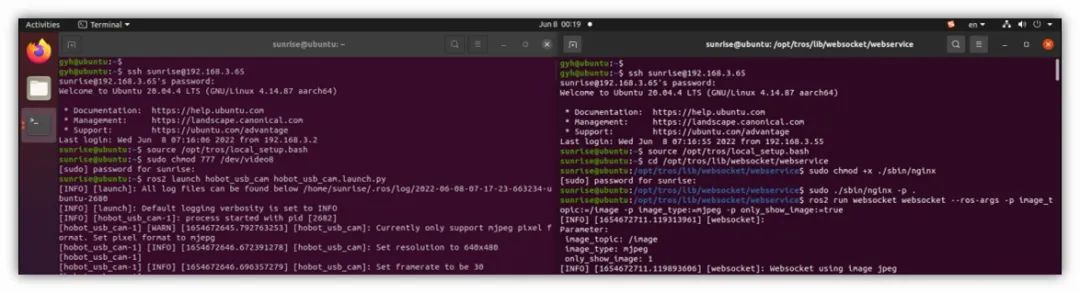
TogetherROS?·Bot相機驅動 除此之外,TogetherROS?·Bot中也提供了USB....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-24 15:48
?700次閱讀




 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1

