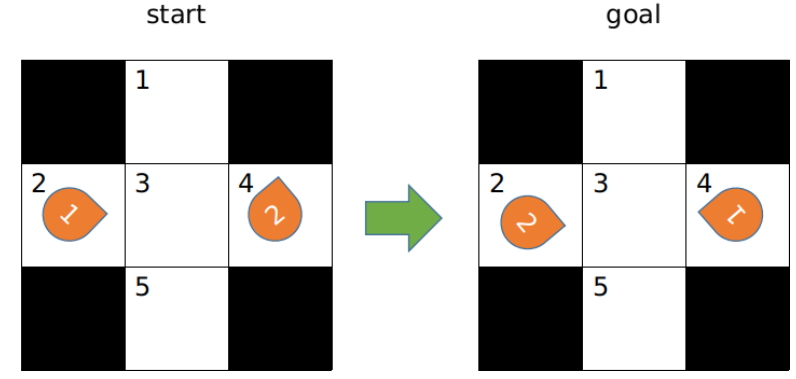
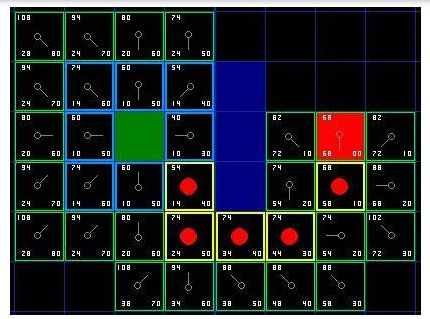
實例講解 以下將通過一個簡單的實例講解CBS的基本過程,實例如圖2所示。 圖2 初始和目標狀態 CB....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-17 16:44
?1294次閱讀
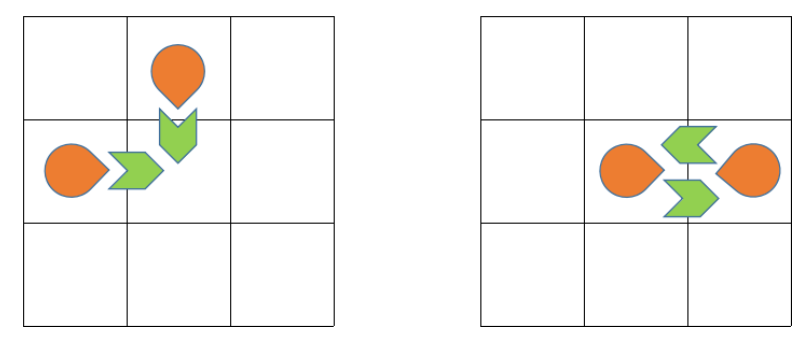
單個機器人通過路徑規劃、運動控制,能夠躲避環境中的障礙物,但會面臨一個嚴峻的問題。當一個場景中存在多....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-17 16:20
?1068次閱讀
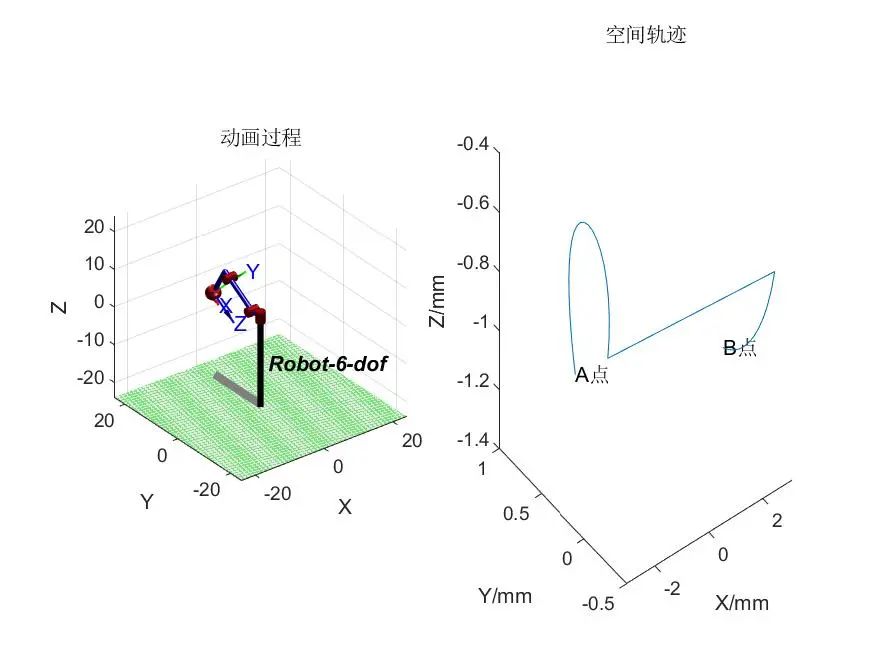
采用五次多項式插值法進行機械臂軌跡規劃,基于Matlab Robotics Toolbox平臺進行關....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-17 16:11
?2065次閱讀
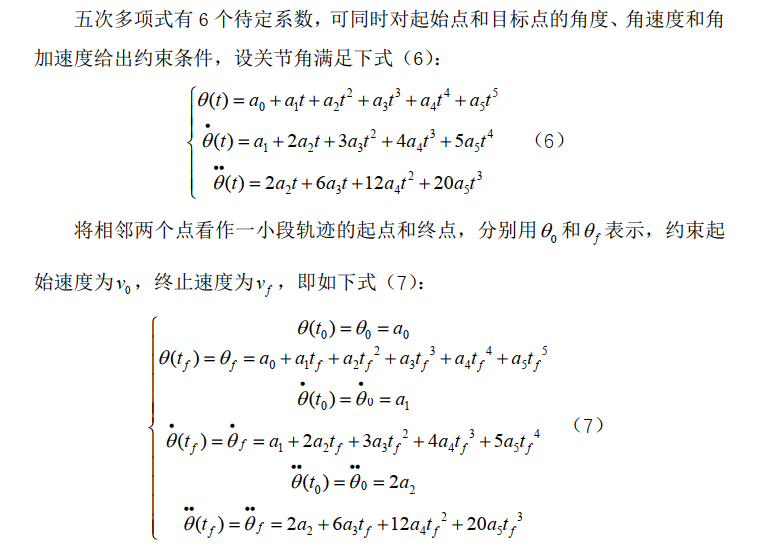
五次多項式插值法 五次多項式有6個待定系數,可同時對起始點和目標點的角度、角速度和角加速度給出約束條....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-17 15:57
?2920次閱讀
對串聯機械臂而言,軌跡規劃可以分為:關節空間軌跡規劃和笛卡爾空間軌跡規劃。關節空間軌跡規劃是把機器人....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-17 15:52
?2000次閱讀
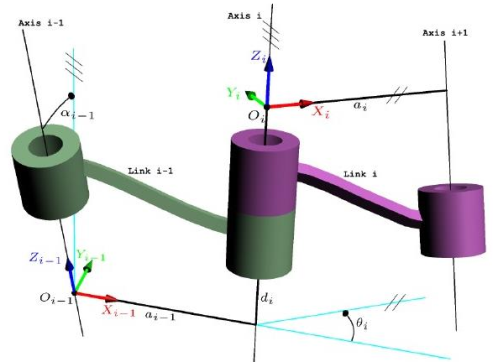
該機械臂 6 個關節都是轉動關節,前 3 個關節確定手腕參考點的位置,后 3個關節確定手腕的方位。和....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-17 15:48
?4178次閱讀
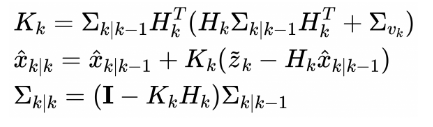
總體模型 將以上兩組單獨的測量結果疊加起來,形成卡爾曼濾波器中使用的觀測向量。 同樣,每個度量的協方....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-16 18:04
?843次閱讀
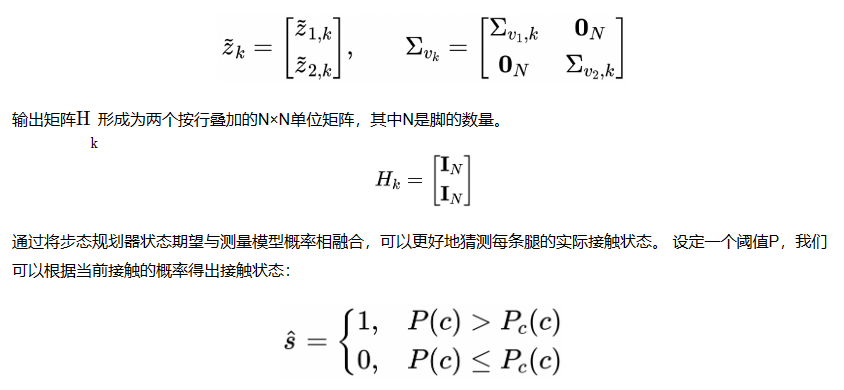
測量模型(update模型) 預測模型中極有可能包含了規劃器所產生的誤差,因此,我們可以使用更多的測....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-16 17:57
?688次閱讀
接觸檢測 步態規劃器給出的接觸序列是嚴格按照時間進行周期性計算的。而在實際運行當中,由于地形的不平整....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-16 17:51
?959次閱讀
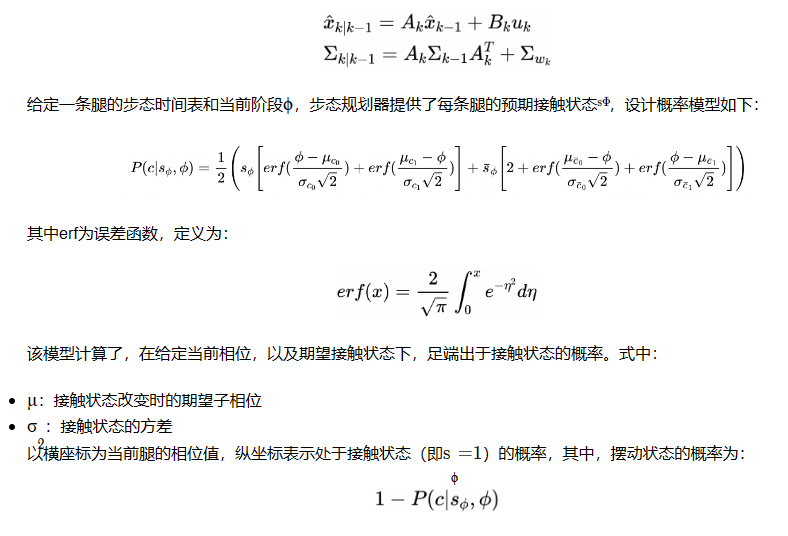
步態規劃 因為我們的四足機器人足端,是在不停地與地面接觸,懸空(擺動),所以這里說的步態規劃,其實指....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-16 17:33
?968次閱讀
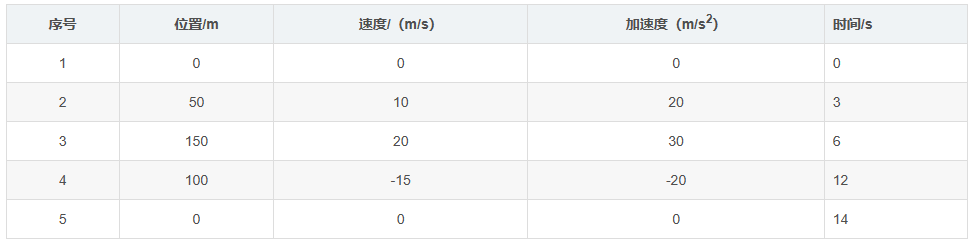
這里簡單利用一個線性函數進行演示 取a=1,b=1,其圖像隨時間變化如下: 利用周期函數對時間進行調....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-16 17:24
?523次閱讀
0、步態規劃 四足機器人控制當中,步態是至關重要的一項。我們可以簡單理解成四足機器人運動過程中各腿的....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-16 17:17
?1215次閱讀

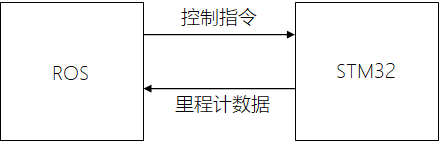
1.通信協議 控制指令格式(15字節) 2.ROS端 在ROS端,首先需要接收從其他節點的控制消息,....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-16 17:10
?940次閱讀

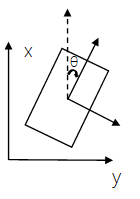
STM32端返回的x軸線速度、y軸線速度是相對于自身的機體坐標系的速度,而機器人的位置信息是相對于世....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-16 16:58
?538次閱讀
1.通信協議 里程計數據格式(19字節) 2.STM32端 /** * @brief 發送里程計數據....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-16 16:48
?761次閱讀

ROS與STM32的通信流程如圖所示 主要包含兩個方面: 小車里程計數據的上傳與接收 控制指令的下發....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-16 16:36
?663次閱讀
驅動器有哪些? 2.1 有刷電機驅動器 直流有刷電機的驅動方法其實本質上是使用 H 橋電路進行驅動,....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-16 16:28
?2256次閱讀
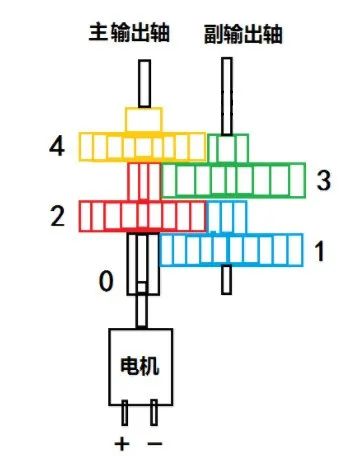
舵機 舵機是一種“特殊”的直流電機,其構造不僅只有電機部分,而且還自帶一個控制器,所以舵機本身就是一....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-16 16:17
?4482次閱讀
伺服電機 “伺服”一詞是來源于希臘語“奴隸”的意思,那么伺服電機也可以理解為絕對服從控制信號指揮電機....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-16 16:13
?1359次閱讀
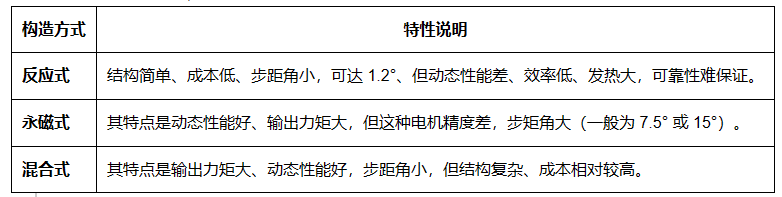
步進電機 步進電機是一種將電脈沖信號轉變為角位移或線位移的開環控制電機,是現代數字程序控制系統中的主....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-16 16:08
?1522次閱讀
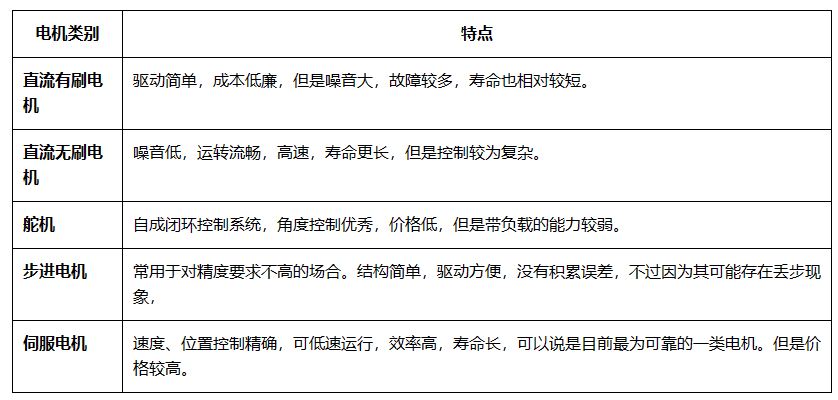
直流電機 在直流電機中還分為普通的直流電機、直流減速電機,有刷和無刷,共分為: 直流有刷電機 直流有....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-16 16:01
?4322次閱讀
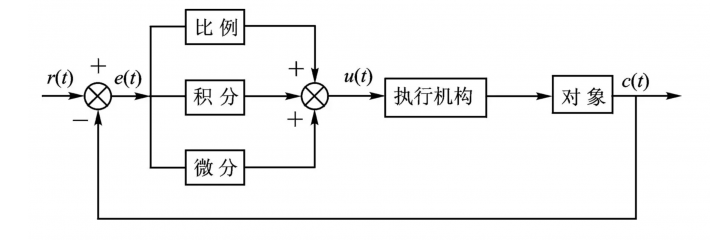
我們在學習和使用PID的時候,可能會有很多電機的選擇。然而不同的電機使用的PID參數是不太一樣的。所....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-16 15:56
?3037次閱讀
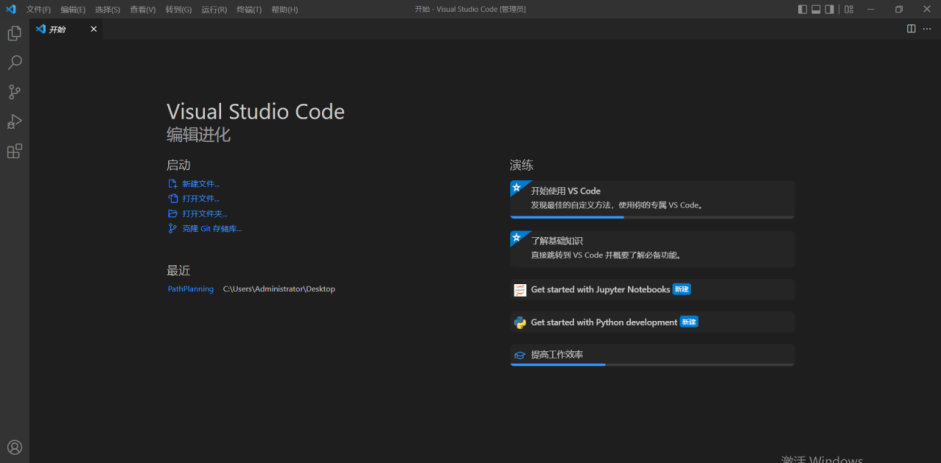
這里我們使用Anacondda的Python編程環境,使用Visual Studio Code軟件進....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-16 15:52
?799次閱讀
路徑規劃算法主要可分成兩種,一種是基于搜索結果的規劃,另一類便是本文中將要提及的基于采樣的規劃。 一....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-16 15:45
?793次閱讀
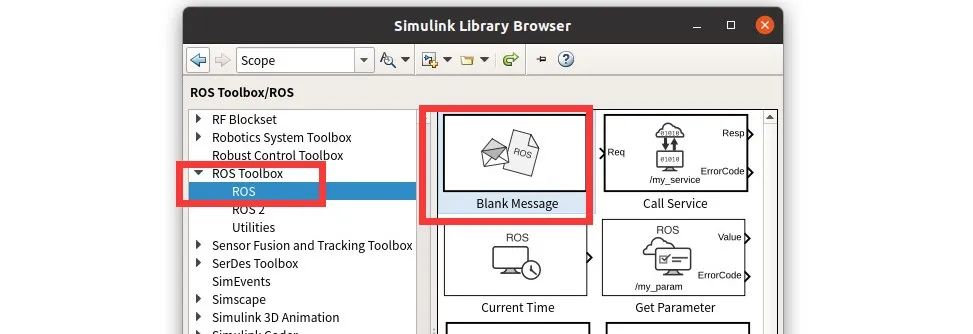
創建一個空白ROS消息,并用機器人路徑的X和Y位置填充它。然后將更新后的ROS消息發布到ROS網絡。....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-15 18:18
?1176次閱讀
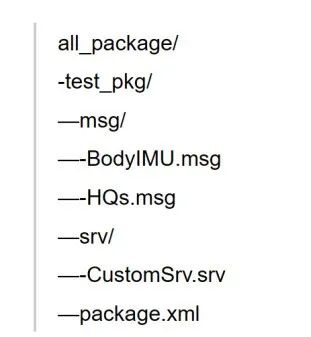
自定義Message 當我們的 message 消息比較復雜時,通常要用到自定義的 message ....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-15 18:12
?1889次閱讀
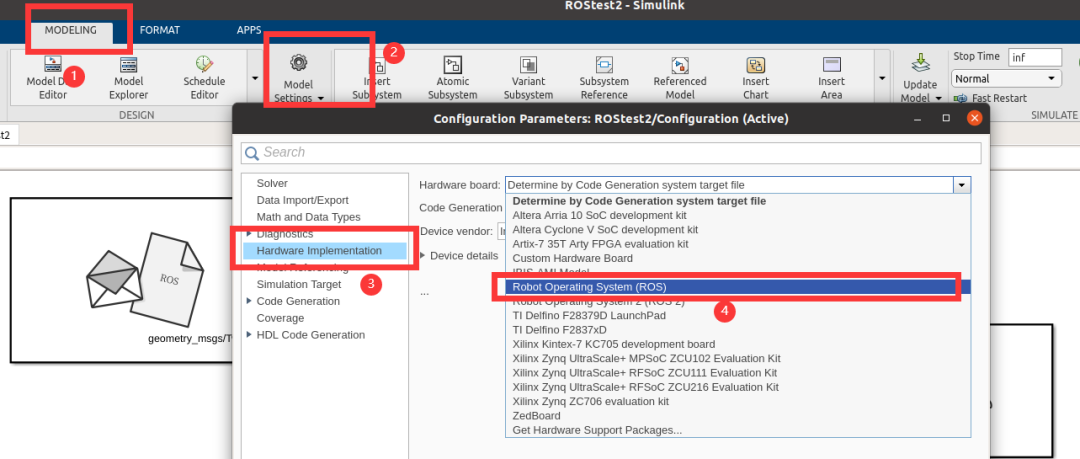
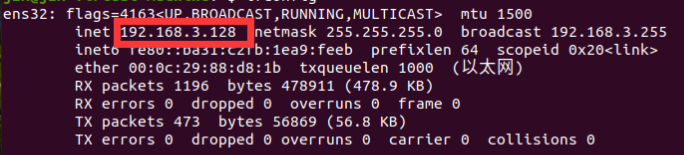
當我們用simulink完成控制程序的搭建后,我們期望下一次可以直接對ROS進行控制,而不是每次都需....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-15 17:53
?1168次閱讀
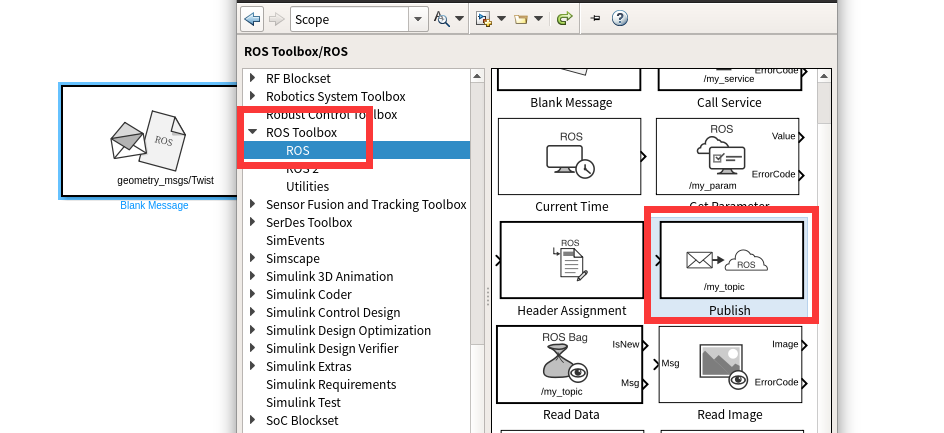
創建一個Publisher 配置一個block,并向/location的節點發送一條geometry....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-15 17:32
?808次閱讀
Simulink對機器人操作系統(ROS)的支持使我們能夠創建與ROS網絡一起工作的Simulink....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-15 17:26
?735次閱讀
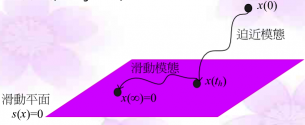
滑模控制目的 對于滑模控制而言,我覺得我們先要明白其目的再來學習。 一開始我們對滑動控制的定義是:滑....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-15 17:15
?5114次閱讀




 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1

