SLAM作為一種基礎技術,從最早的軍事用途(核潛艇海底定位就有了SLAM的雛形)到今天,已經逐步走入人們的視野,過去幾年掃地機器人的盛行讓它名聲大噪,近期基于三維視覺的VSLAM又讓它越來越顯主流。
2018-08-08 10:07:28 9779
9779 特征點法的VSLAM系統中,特征點并不是越多越好;相反, 少量 并且 質量高 的點會讓這個SLAM系統位姿精度更高,且消耗更少的存儲資源和計算資源。
2022-08-23 11:09:481200 本文提出了一個魯棒且快速的多模態語義 SLAM 框架,旨在解決復雜和動態環境中的 SLAM 問題。具體來說,將僅幾何聚類和視覺語義信息相結合,以減少由于小尺度對象、遮擋和運動模糊導致的分割誤差的影響。
2022-08-31 09:39:141302 相較于激光雷達SLAM系統,視覺SLAM系統具有不主動發出信號的優點。此外,視覺是對環境的稠密感知,可以利用視覺特征構建出更符合人類感知的環境地圖。
2022-12-21 16:18:092454 本文的優勢不僅包括討論A-SLAM的內部組成部分,還包括其應用領域、局限性和未來前景,以及對過去十年A-SLAM進行全面的統計調查。
2023-03-17 10:44:57504 上周的組會上,我給研一的萌新們講解什么是SLAM,為了能讓他們在沒有任何基礎的情況下大致聽懂,PPT只能多圖少字沒公式,這里我就把上周的組會匯報總結一下。 這次匯報的題目我定為“視覺SLAM:一直在
2023-08-21 10:02:071574 
激光SLAM局部定位精度高但全局定位能力差且對環境特征不敏感,而視覺SLAM全局定位能力好但局部定位相對激光雷達較差,兩者融合可以提高SLAM系統的精度和魯棒性。
2023-10-23 11:01:14650 
大多同時定位于建圖(SLAM)系統在傳統上假定的都是靜態世界,這與現實世界的場景不符。
2024-01-05 13:46:49463 
LSD-SLAM 即 Large-Scale Direct SLAM,兼容單目相機和雙目相機。LSD-SLAM是一種基于光流跟蹤的直接法SLAM,但是實現了半稠密建圖,建圖規模大,可以在線實時運行。
2024-02-26 09:41:50272 
SLAM技術作為機器人自主移動的關鍵技術,讓很多人都誤解為:SLAM=機器人自主定位導航。 其實,SLAM≠機器人自主定位導航 ,不解決行動問題。 SLAM如其名一樣,主要解決的是機器人的地圖構建
2018-08-24 16:56:24
。 超大場景下建圖完整閉合過程 2.詞袋模型 除了SLAM算法的升級和優化之外,現在還有很多系統采用成熟的詞袋模型方法來幫助機器人完成閉環,說的簡單點就是把幀與幀之間進行特征比配。 1、從每幅圖像中提
2019-03-06 15:38:04
近年來,由于掃地機的出現使得SLAM技術名聲大噪,如今,已在機器人、無人機、AVG等領域相繼出現它的身影,今天就來跟大家聊一聊國內SLAM的發展現狀。 SLAM的多領域應用SLAM應用領域廣泛,按其
2018-12-06 10:25:32
目前,SLAM(即時定位與地圖構建)技術主要被運用于無人機、無人駕駛、機器人、AR、智能家居等領域,從各應用場景入手,促進消費升級。 機器人 激光+SLAM是目前機器人自主定位導航所
2020-12-01 14:26:37
研究生期間進行了基于2D激光雷達的SLAM的研究,當時主要做了二維激光雷達的數據處理。小弟不才,沒有入得了SLAM的坑,卻一直謎之向往,如今得以機會,決定正式邁出第一步,徹底進入SLAM的坑!心中
2021-08-30 06:13:31
傳統ACC控制系統和RIDIC系統對比分析哪個好?
2021-10-22 07:31:35
agv自由行走的問題。 定位和導航一般是相輔相成,傳統的定位導航方式(電磁導航、磁條導航)的優缺點如下方圖表所示,這些方案的優點和局限性都很明顯。稍微靈活點的導航定位方案運用二維碼、反光板等,人工
2018-11-09 15:59:01
Intelligent Vehicles Applications1. 介紹2. HOOFR-SLAM2.1 系統框架2.2 HOOFR特征提取2.3 映射線程2.3.1 特征匹配1. 介紹提出一種HOOFR-...
2021-12-21 06:35:49
題目:基于SLAM的移動機器人設計嵌入式PPT應具有的幾個部分1、有哪些硬件 1)小車 2)STM32F429開發板 3)樹莓派3b+開發板 4)4g通信模塊 5)GPS模塊 6
2021-11-08 06:17:14
基于視覺的slam自動駕駛,這是我們測試的視頻《基于slam算法的智能機器人》調研分析報告項目背景分析機器人曾經是科幻電影中的形象,可目前已經漸漸走入我們的生活。機器人技術以包含機械、電子、自動控制
2021-08-09 09:37:34
嵌入式系統開發與應用——基于視覺的機器人SLAM入門實踐1一、OpenCV的安裝與配置1. 下載OpenCV3.4.1并解壓到ubuntu相應目錄上2. 下載安裝依賴庫和編譯工具cmake(1)更新
2021-12-16 08:16:12
如何實現基于RK3399開發板的cartographer激光SLAM建圖模塊的設計?
2022-03-07 07:05:11
大家好,我想學習SLAM技術有資深的老師愿意教我嗎?qq:496397940
2018-11-09 13:42:27
樹莓派ROS stm32 slam Freertos VFH+A避障路徑如何規劃?
2022-02-09 07:09:16
的視覺里程計及后端優化的SLAM系統,似乎已經比較好用了。但其在提高實時性的同時精度卻降低了,一旦精度降低,又會面臨長時間累計誤差的問題,特別是像ORB-SLAM那樣只做局部地圖優化的方案。我們該
2018-10-23 17:47:22
SLAM(同步定位與地圖構建),是指運動物體根據傳感器的信息,一邊計算自身位置,一邊構建環境地圖的過程,解決機器人等在未知環境下運動時的定位與地圖構建問題。目前,SLAM 的主要應用于機器人、無人機、無人駕駛、AR、VR 等領域。其用途包括傳感器自身的定位,以及后續的路徑規劃、運動性能、場景理解。
2020-05-20 08:19:40
在機器人運動控制系統架構中,可分為最底層、中間通信層和決策層三大層面,最底層包含了機器人本身的電機驅動和控制部分,中間通信層是底層部分和決策層的通信通路,而決策層則是實現機器人的定位建圖及導航。在
2021-07-05 06:41:57
什么是激光SLAM?視覺VSLAM又是什么?激光SLAM和視覺VSLAM有哪些不同之處?
2021-11-10 07:16:02
什么是激光SLAM?激光SLAM技術在機器人運動控制系統中的應用是什么?
2021-07-30 06:37:25
視覺SLAM——特征點法與直接法對比以及主流開源方案對比 ORB LSD SVO DSO
2020-06-02 16:56:49
【總結】視覺SLAM筆記整理
2020-07-17 14:05:20
圖引擎,讓機器人在復雜、大面積的場景下也能輕松應對,穩定發揮,完成定位導航任務。 傳統SLAM 及SLAM 3.0的建圖對比: -建圖精度高,圖優化式建圖 - 主動閉環修正 - 建圖穩定、不
2019-01-21 10:57:46
請問如何理解SLAM用到的傳感器輪式里程計IMU、雷達、相機的工作原理?
2021-10-09 08:52:46
實現單目視覺同時定位與建圖(SLAM)仿真系統,描述其設計過程。該系統工作性能良好,其SLAM算法可擴展性強,可以精確逼近真實單目視覺SLAM過程。以方便SLAM算法的研究為目標,提
2009-04-15 08:50:37 82
82 基于擴展卡爾曼濾波的SLAM算法相關代碼。
2016-03-22 14:11:1434 隨著AR/VR行業的興起,以及智能移動機器人、無人駕駛的發展,行業對SLAM技術的需求出現了井噴。 另一方面,隨著傳感器技術的發展,計算資源的豐富以及算法的進步,SLAM技術本身也進入了一個從算法
2017-09-22 16:11:032 、幀間配準、位姿變換估計以及閉環檢測對SLAM系統的影響,建立了關鍵幀閉環匹配算法和SLAM實時性與魯棒性之間的關系,提出了一種基于ORB關鍵幀匹配算法的SLAM方法。運用改進ORB算法加快了圖像特征點提取與描述符建立速度;結合相機模型與深度信息,
2018-03-26 10:57:326 高仙的SLAM2.0技術體系核心,是基于多傳感器融合+深度學習的架構,即語義SLAM。高仙SLAM2.0技術方案以語義分析、機器學習為基礎,結合云端實時信息處理以及專為多傳感器融合而開發的專業算法體系,真正實現了SLAM在建圖和導航兩個環節的完整應用。
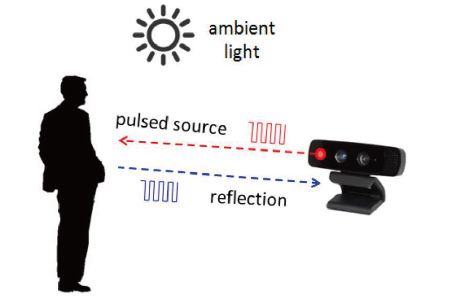
2018-05-15 16:48:308535 SLAM要實現定位和制圖,第一步就是采集數據,而采集數據的關鍵就是傳感器,可以說沒有傳感器就沒有SLAM。而SLAM上的傳感器種類多樣,目前主流的我們可以將其分為兩大類:激光雷達和攝像頭。
2018-07-17 16:59:0232392 SLAM(同步定位與地圖構建),是指運動物體根據傳感器的信息,一邊計算自身位置,一邊構建環境地圖的過程,解決機器人等在未知環境下運動時的定位與地圖構建問題。
2018-11-14 08:54:017334 隨著傳感器種類和安裝方式的不同,SLAM的實現方式和難度會有很大差異。按傳感器來分,SLAM主要分為激光、視覺兩大類。其中,激光SLAM研究較早,理論和工程均比較成熟。視覺方案目前大部分實驗室研究
2019-05-12 10:31:134896 近年來SLAM系統與其他傳感器的融合成為了一大熱點。
2019-05-24 09:45:0612481 顯著地減小累積誤差。回環檢測實質上是一種檢測觀測數據相似性的算法。對于視覺SLAM,多數系統采用目前較為成熟的詞袋模型(Bag-of-Words, BoW)。詞袋模型把圖像中的視覺特征(SIFT
2019-08-09 17:31:201430 顯著地減小累積誤差。回環檢測實質上是一種檢測觀測數據相似性的算法。對于視覺SLAM,多數系統采用目前較為成熟的詞袋模型(Bag-of-Words, BoW)。詞袋模型把圖像中的視覺特征(SIFT
2019-09-11 22:01:351759 運動恢復結構(SfM)和 SLAM 所解決的問題非常相似,但 SfM 傳統上是以離線形式進行的,而 SLAM 則已經慢慢走向了低功耗/實時/單 RGB 相機的運行模式。
2019-11-22 14:34:0716984 
近年來,隨著機器人、無人駕駛、AR等行業的興起,SLAM熱度持續攀升,對于SLAM技術的關注除了學術界,在相關產品的帶動下,大眾對于SLAM的關注度也在逐年遞增。根據百度的搜索指數
2019-11-27 12:12:453731 ? 在某社交平臺,一篇題為“自主移動機器人真的需要SLAM嗎“的問答,引起了大家的熱議。 有人認為機器人確實是需要SLAM的,但目前流行的SLAM項目還不夠,機器人更需要符合其特色的SLAM方法
2019-12-13 13:47:222106 近年來,伴隨移動機器人在各行各業的廣泛應用,SLAM這個“名字”逐漸被更多的人所熟悉,但是SLAM具體是什么、SLAM有哪些應用領域、激光SLAM和視覺SLAM哪種方式更有優勢等等這些問題卻總是模糊不清。今天,小編就帶大家來詳細了解一下~
2020-01-18 17:43:003117 SLAM技術作為機器人自主移動的關鍵技術,讓很多人都誤解為:SLAM=機器人自主定位導航。
2020-03-30 10:39:112647 如今科技發展日新月異,諸如機器人、AR/VR等前沿科技產品已走入了大眾生活當中。但是想在這些領域讓用戶有更好的體驗,就需要很多底層技術的支持,SLAM就是其中之一。如果說機器人離開了SLAM
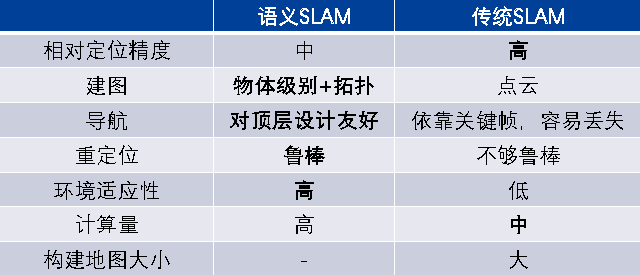
2020-04-17 09:21:4153848 在業內,視覺SLAM與激光SLAM誰更勝一籌,誰將成為未來主流趨勢這一問題,成為大家關注的熱點,不同的人也有不同的看法及見解,以下將從成本、應用場景、地圖精度、易用性幾個方面來進行詳細闡述。
2020-08-28 14:53:3016068 
SLAM技術是一種計算機程序,用于構建座席周圍環境的虛擬地圖并更新其實時坐標。
2021-01-22 14:55:0018670 仙工智能近日推出基于SRC的激光SLAM搬運式自動叉車SFL-CBD20和基于SRC的激光SLAM小型堆高式自動叉車SFL-CDD14。 激光SLAM搬運式自動叉車SFL-CBD20 激光SLAM
2020-10-09 14:53:111763 當我們談論SLAM時,最先問到的就是傳感器。SLAM的實現方式與難度和傳感器的形式與安裝方式密切相關。傳感器分為激光和視覺兩大類,視覺下面又分三小方向。
2020-12-26 00:25:302034 SLAM作為機器人自主定位導航的重要突破口正不斷引起業內重視,它是實現機器人自主行走的關鍵技術,可幫助機器人實現即時定位與地圖構建,在實際應用中,SLAM技術究竟又是如何實現的呢?一起來探個究竟。
2020-12-26 09:23:19569 SLAM這個“名字”逐漸被更多的人所熟悉,但是SLAM具體是什么、SLAM有哪些應用領域、激光SLAM和視覺SLAM哪種方式更有優勢等等這些問題卻總是模糊不清。
2020-12-26 09:39:322084 定位技術是機器人實現自主定位導航的最基本環節,是機器人在二維工作環境中相對于全局坐標的位置及其本身的姿態。目前SLAM (Simultaneous Localization and Mapping即時定位與地圖構建)是業內主流的定位技術,有激光SLAM和視覺SLAM之分。
2020-12-26 10:59:431286 在SLAM系統中增加更多的相機可以提高魯棒性和準確性,但會使視覺前端的設計變得非常復雜。因此,文獻中的大多數系統是為特定的相機配置定制的。在這項工作中,我們的目標是一個適用于任意多相機設置的自適應
2021-01-07 11:51:061792 本文提出的立體視覺+慣導+激光雷達的SLAM系統,在比如隧道一些復雜場景下能夠實現良好性能。VIL-SLAM通過將緊密耦合的立體視覺慣性里程計(VIO)與激光雷達建圖和激光雷達增強視覺環路閉合相結合
2021-02-18 17:59:061949 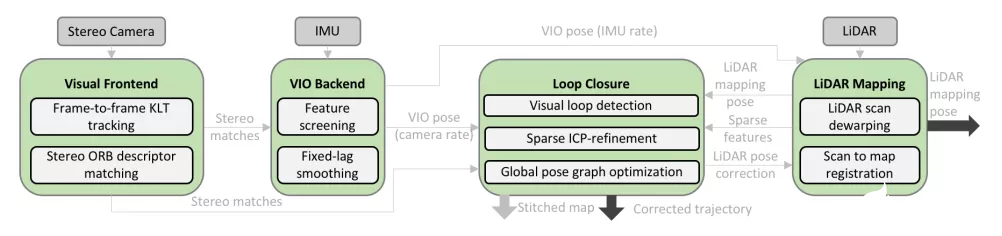
針對基于RBPF的激光SLAM算法在重采樣過程中出現的樣本貧化和激光測量模型不準確的問題,提出種優化的激光SLAM算法。為緩解重采樣過程中的樣本貧化問題,采用最小采樣方差重采樣方法改進原重采樣方法
2021-04-01 10:48:316 一般將使用單線雷達建構二維地圖的SLAM算法,稱為2D Lidar SLAM。大家熟知的2D Lidar SLAM算法有:gmapping, hector, karto, cartographer。通常數據和運動都限制在2D平面內且運動平面與激光掃描平面平行。
2021-04-18 10:18:1212157 
課題組已將該研究成果應用于智能駕駛即時定位與建圖(SLAM)任務中,提出了基于三維激光數據的層級式SLAM方法,實現了無GNSS環境下智能無人系統的高精度自主定位定姿,在智能駕駛國際著名公開數據集KITTI上排名全球第7(純激光SLAM算法中排名全球第4)。
2021-04-20 09:19:301806 
我看來,vslam得發展也就是從MonoSLAM->PTAM->圖優化SLAM->ORB-SLAM為代表的現代slam,其中可能還有許多內容,不過這些開源SLAM一定程度上體現了SLAM發展過程了....
2021-06-18 10:40:521357 
SLAM (simultaneous localization and mapping),也稱為CML (Concurrent Mapping and Localization), 即時定位與地圖
2021-08-26 16:07:316792 無人平臺在大范圍環境中 實現自 主定位與導航的能力 需求日 益嚴苛, 其中 基于激光雷達的同步定位和繪圖 技術(SLAM) 是主流的研究方案。 在這項工作中, 本文系統概述了 3D 激光雷達SLAM
2022-03-21 16:07:574576 ./oschina_soft/Snake-SLAM.zip
2022-06-16 11:27:432 同時定位和映射(SLAM)是大多數自主系統所需的基本能力。在本文中,我們討論了基于自動駕駛汽車記錄的3D激光掃描的SLAM閉環問題。
2022-10-27 11:08:14774 視覺SLAM是一種基于視覺傳感器的 SLAM 系統,與激光傳感器相比,視覺傳感器具有成本低、保留環境語義信息的優點,能夠與深度學習進行大量結合。
2022-11-02 15:02:32747 一個建立在兩個基于直接法的緊耦合的完整的激光視覺慣導融合的slam框架;
2022-11-09 09:55:541148 視覺SLAM是一種基于視覺傳感器的 SLAM 系統,與激光傳感器相比,視覺傳感器具有成本低、保留環境語義信息的優點,能夠與深度學習進行大量結合。
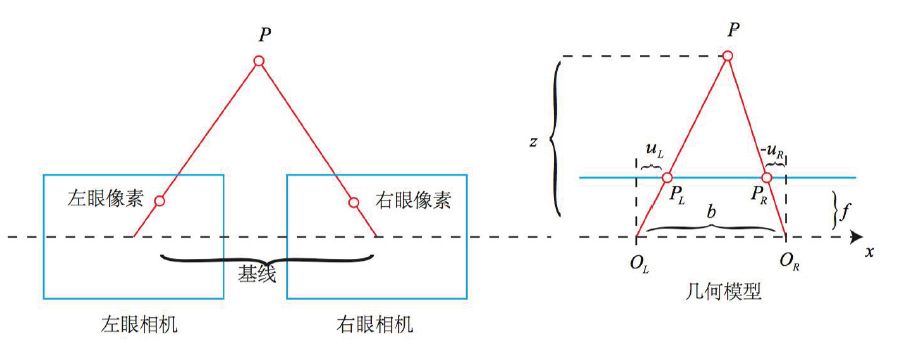
2022-11-29 21:38:37627 (Visual SLAM,VSLAM)是將圖像作為主要環境感知信息源的SLAM系統,VSLAM以計算相機位姿為主要目標,通過多視幾何方法構建3D地圖[4]
2022-12-02 15:00:281149 手持SLAM設備最大的特點肯定要放到手持這個動作上面,由于SLAM算法的優越性,手持可以做到走到哪里測到哪里。
2022-12-27 10:43:413287 我們提出了NICE-SLAM,一個密集的RGB-D SLAM系統,它具有實時性、可擴展性、預測性和對各種挑戰性場景的魯棒性。
2023-01-30 11:19:29451 基于特征點法的視覺SLAM系統很難應用于稠密建圖,且容易丟失動態對象。而基于直接法的SLAM系統會跟蹤圖像幀之間的所有像素,因此在動態稠密建圖方面可以取得更完整、魯棒和準確的結果。
2023-03-13 09:38:45746 視覺里程計最近幾年越來越受到學術界以及工業界的認可,以ORB和VINS為代表的視覺SLAM已經可以滿足絕大多數場景,而OV2SLAM在其他VSLAM中脫穎而出,其實時性以及具體的回環性能在測試中都得到了認可。
2023-03-21 17:16:31768 一般將使用單線雷達建構二維地圖的SLAM算法,稱為2D Lidar SLAM。大家熟知的2D Lidar SLAM算法有:gmapping, hector, karto, cartographer。通常數據和運動都限制在2D平面內且運動平面與激光掃描平面平行。
2023-03-27 11:06:561385 很多同學都覺得Slam方向難以入門,也難以學深。但其實相對來講,不像其他很多方向,很多的東西大家都已經做了,并且做的很不錯,要想發論文或者找創意突破比較吃力。slam方向還有很多深層次的多領域結合應用的內容還比較少,并且slam更深的內容還有很多東西需要做。
2023-05-09 14:25:14638 
和自動駕駛等。近幾年來,在汽車制造商的參與下,對智能汽車的關注進一步推動
了SLAM的研究工作。
全球導航衛星系統(GlobalNavigation Satellite System,GNSS
2023-06-02 14:25:222 電子發燒友網站提供《使用Bittle和Raspberry Pi 4的ROS SLAM.zip》資料免費下載
2023-06-14 15:23:220 vMAP 是一種基于神經場的對象級密集 SLAM 系統,可根據 RGB-D 輸入流實時自動構建對象級場景模型。
2023-06-15 09:29:13498 
與ORB-SLAM2相比,ORB-SLAM3在處理大視差和長時間未觀測到的場景時效果更好。它還提供了更準確的幀間運動估計和更快的處理速度。
2023-06-19 09:28:121968 
用在SLAM上的傳感器主要可分為兩大類,一種是激光雷達,而另一種是攝像頭,為此,業內人士也將SLAM分為激光SLAM和視覺SLAM。激光SLAM比視覺SLAM起步早,在理論、技術和產品落地上都相對成熟。
2022-02-15 19:15:241850 
近日,全國SLAM技術論壇于廈門大學舉辦。本次論壇聚焦SLAM和相關技術的前沿發展以及在應用領域的行業機會,旨在為SLAM技術和應用領域搭建全方位展示與交流平臺,推動國內SLAM技術的發展以及產學研
2023-08-01 09:37:23526 正如圖中所示,機器人自主定位導航技術中包括:定位和地圖創建(SLAM)與路徑規劃和運動控制兩個部分,而SLAM本身只是完成機器人的定位和地圖創建,二者有所區別。
2023-08-03 11:12:00700 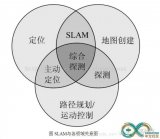
SLAM至今已歷經三十多年的研究,這里給出經典視覺SLAM框架,這個框架本身及其包含的算法已經基本定型,并且已經在許多視覺程序庫和機器人程序庫中提供。
2023-08-10 14:15:53410 
激光雷達是最古老,研究也最多的SLAM傳感器。它們提供機器人本體與周圍環境障礙物間的距離信息。常見的激光雷達,例如SICK、Velodyne還有我們國產的rplidar等,都可以拿來做SLAM。激光雷達能以很高精度測出機器人周圍障礙點的角度和距離,從而很方便地實現SLAM、避障等功能。
2023-08-16 10:31:081895 
大多數現有的視覺SLAM方法嚴重依賴于靜態世界假設,在動態環境中很容易失效。本文提出了一個動態環境下的實時語義RGB-D SLAM系統,該系統能夠檢測已知和未知的運動物體。為了減少計算成本,其只對
2023-08-25 16:49:47274 
在實驗中,hdl_graph_slam和BLAM在所有數據集上的性能均不理想,因而下面不再討論。而SC-LeGo-LOAM的性能較之LeGo-LOAM也沒有明顯改善,因而下面也不再討論。
2023-08-28 11:47:39368 
傳統的同步定位與制圖(SLAM)系統使用環境的靜態點作為實時定位和制圖的特征。當可用的點特征很少時,系統很難實現。一個可行的解決方案是引入線特征。在包含豐富線段的復雜場景中,線段的描述差別不大,這可
2023-09-01 17:16:29314 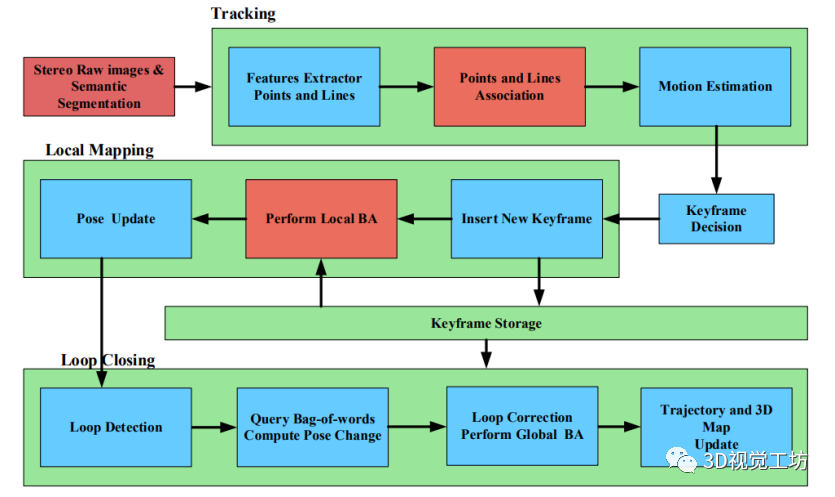
近年來,SLAM技術取得了驚人的發展,領先一步的激光SLAM已成熟的應用于各大場景中,視覺SLAM雖在落地應用上不及激光SLAM,但也是目前研究的一大熱點,今天我們就來詳細聊聊視覺SLAM的那些事兒。
2023-09-05 09:31:111389 
GO-SLAM主要還是基于NeRF進行稠密重建,可以發現相較于NICE-SLAM這些SOTA方案,GO-SLAM重建場景的全局一致性更好,這主要是因為它引入了回環和全局BA來優化累計誤差。
2023-09-11 10:03:29685 
SLAM(Simultaneous Localization and Mapping)同步定位與地圖構建,一種同時實現設備自身定位和環境地圖構建的技術。
2023-09-20 10:59:591060 
什么是激光雷達3DSLAM?在了解這個概念之前,我們首先需要弄懂什么是“SLAM”。SLAM,英文是SimultaneousLocalizationandMapping,意思是即時定位與建圖。通俗
2023-11-25 08:23:57999 
目前視覺SLAM系統可以在微型個人計算機(PC)和嵌入式設備中運行,甚至可以在智能手機等移動設備中運行(Klein和Murray,2009)。與室內或室外移動機器人不同,自動駕駛車輛具有更復雜的參數,尤其是當車輛在城市環境中自動駕駛時。
2023-12-04 09:22:37548 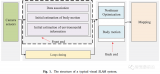
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論